ROS自学笔记十五:URDF工具
要使用工具之前,首先需要安装,安装命令:
sudo apt install liburdfdom-tools1.check_urdf 语法检查
在ROS中,你可以使用`.check_urdf`命令行工具来对URDF(Unified Robot Description Format)文件进行语法检查和验证。这工具通常用于确保你的URDF文件符合规范,没有语法错误或不一致,以便顺利地用于ROS中的机器人仿真和控制。
以下是`.check_urdf`工具的基本语法:
check_urdf <urdf_file>其中,`<urdf_file>`是你要检查的URDF文件的路径。你可以在终端中运行这个命令,并将实际的URDF文件路径替换为`<urdf_file>`。
例如,如果你有一个名为`my_robot.urdf`的URDF文件,你可以运行以下命令进行语法检查:
check_urdf my_robot.urdf`.check_urdf`工具将会分析指定的URDF文件,并在终端中输出关于文件的语法和结构的信息。如果文件有错误或不一致之处,它会报告相关问题,以帮助你进行修复。

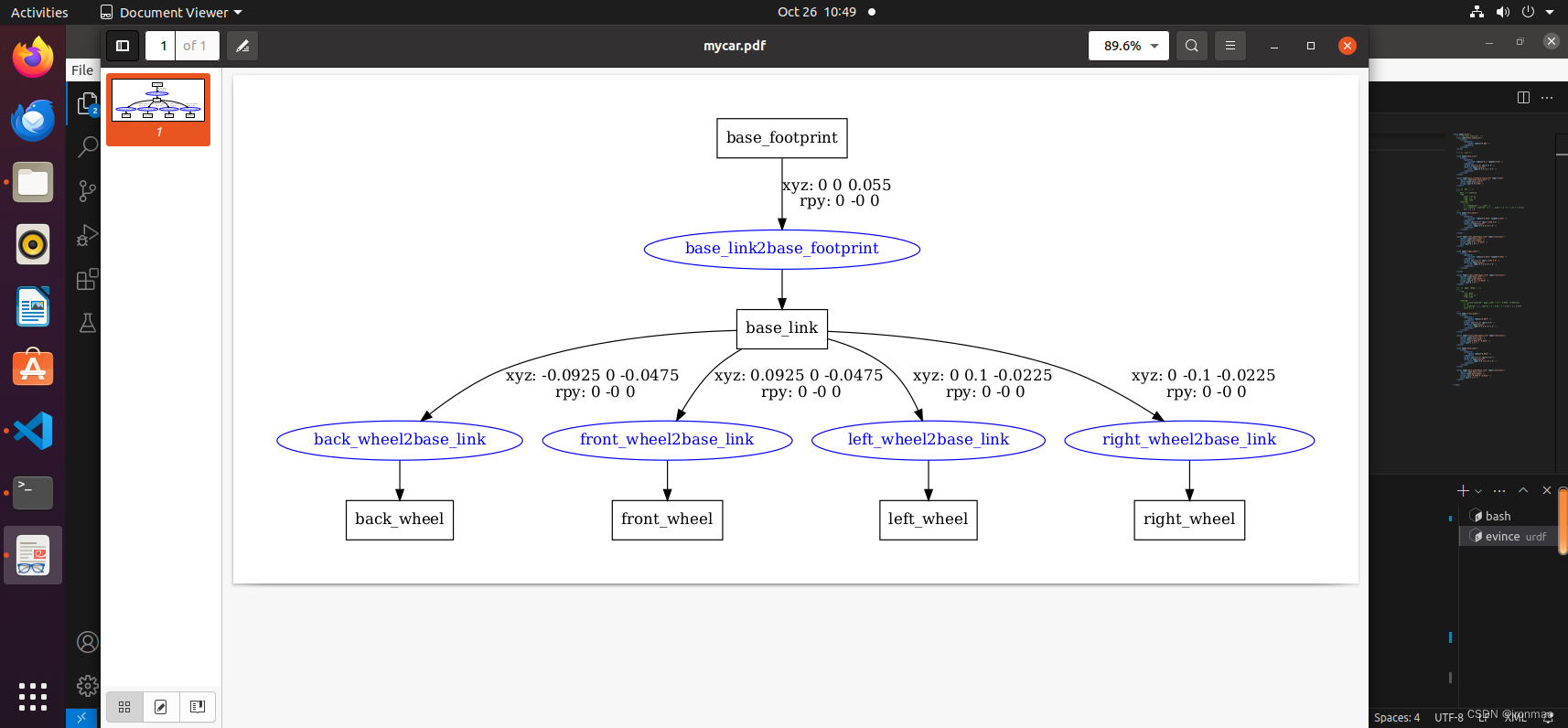
2.urdf_to_graphiz 结构查看
`urdf_to_graphiz`是一个用于可视化URDF(Unified Robot Description Format)文件结构的工具,它将URDF文件转换为Graphviz格式,然后使用Graphviz工具生成图形表示。这对于查看和理解机器人模型的结构非常有用。
进入urdf文件所属目录,调用:
urdf_to_graphiz urdf文件,当前目录下会生成 pdf 文件