STM32 PWM配置及呼吸灯
PWM的英文全称是"Pulse Width Modulation",中文翻译为"脉冲宽度调制"。
在PWM中可以调节的其实只有两个东西,一个叫做可调周期(调频率),另一个叫做占空比(高电平/周期)。
而呼吸灯其实就是改变流经二极管的平均电流,也就是说当周期一定的情况下,流经二极管的高电平发生改变。
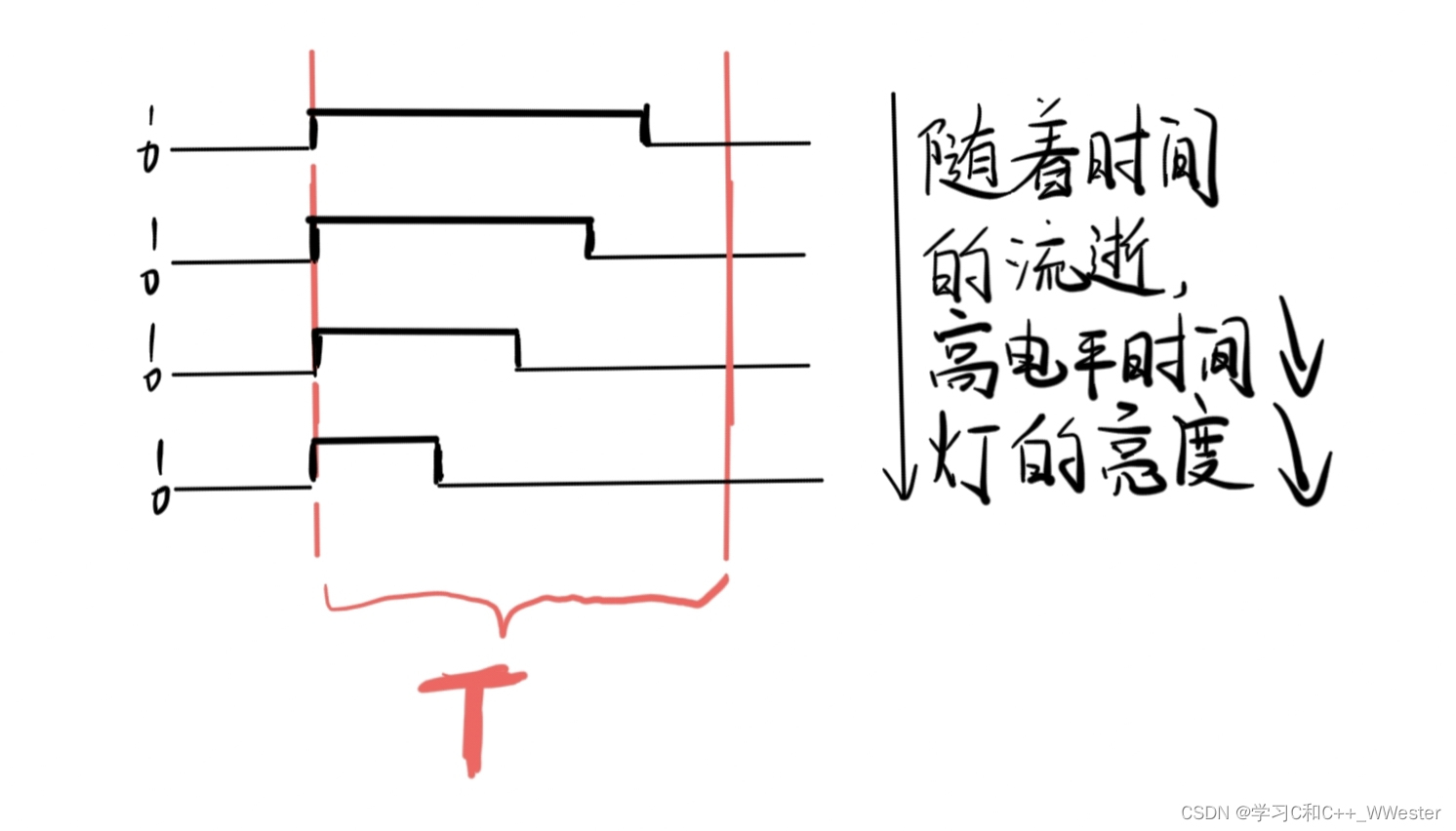
反之,倒回去,灯就会由暗变亮。
由此可以看出其周期不需要改变,只需要改变其占空比。
我们假设LED灯在PA1上,那么我们需要配置两个东西,一个是GPIO_PA1,一个是TIM2_PWM。所以我们要注意PA口的时钟,和TIM2挂在哪个总线上,需要先把这两个外设时钟打开。
查看STM32F103xx performance line block diagram(性能线路框图)

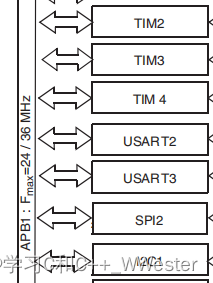
可以看到GPIOA挂到了APB2上,TIM2挂到了APB1上。所以我们做的第一件事就是开启GPIOA和TIM2的时钟。
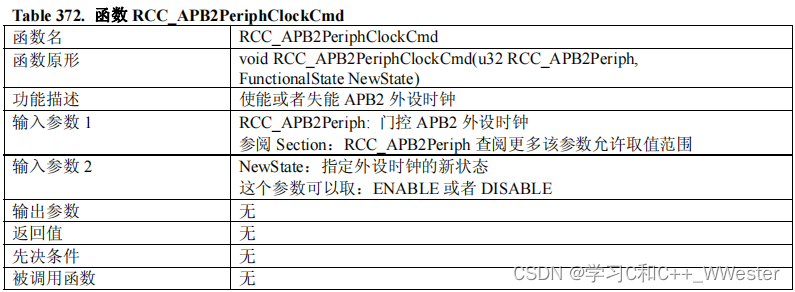
打开库函数手册

//1.打开外设时钟
void TIM2_PWM_Configarution(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
}
从STM32F103xx pin definitions可以看到PA1有个复用功能TIM2_CH2。我们要把GPIOA_Pin_1配置成复用功能。

//2.配置GPIO口
void TIM2_PWM_Configarution(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}//3.设置周期
void TIM2_PWM_Configarution(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 19999;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
//TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
}
PWM工作的时候,有一个中间的比较值,例如PWM的计数是从0~100,设置中间比较值为50。假设现在值是1,它就会和50比较,因为它是向上计数,所以1++变为2,当增加到比较值的时候,电平会发生改变。而模式1和模式2就是决定初始的电平。
如果是PWM1模式:
a)如果设置TIM_OCPolarity_High:
TIMx_CNT<TIMx_CCR输出为高电平
TIMx_CNT>TIMx_CCR输出为低电平
b)如果设置TIM_OCPolarity_Low:
TIMx_CNT<TIMx_CCR输出为低电平
TIMx_CNT>TIMx_CCR输出为高电平
如果是PWM2模式:
a)如果设置TIM_OCPolarity_High:
TIMx_CNT<TIMx_CCR输出为低电平
TIMx_CNT>TIMx_CCR输出为高电平
b)如果设置TIM_OCPolarity_Low:
TIMx_CNT<TIMx_CCR输出为高电平
TIMx_CNT>TIMx_CCR输出为低电平
//4.输出比较功能
void TIM2_PWM_Configarution(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 19999;
TIM_TimeBaseStructure.TIM_Prescaler = 71; //71+1= 72·ÖƵ
//TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputNState_Enable;
TIM_OC2Init(TIM2, & TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);
}
main.c
#include "bsp_SysTick.h"
#include "bsp_tim2.h"
int main(void)
{
int i;
SysTick_Configuration();
TIM2_PWM_Configuration();
while(1)
{
for(i = 0; i < 20000; i++)
{
TIM_SetCompare2(TIM2, i);
Delay_us(50);
}
for(i = 20000; i>0; i--)
{
TIM_SetCompare2(TIM2, i);
Delay_us(50);
}
}
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.kler.cn/a/105750.html 如若内容造成侵权/违法违规/事实不符,请联系邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!