科聪协作(复合)移动机器人整体解决方案
协作(复合)移动机器人(AGV/AMR)相较传统工业机器人具有更加安全和简单的工作优势,具备较强的发展潜力。协作(复合)移动机器人安全性和操作的简洁性、灵活性不断提高,优势得到了充分发挥,在越来越多的领域得到了应用。目前已在焊接、无人零售、装配、物流、医疗和教育等领域得到广泛应用。

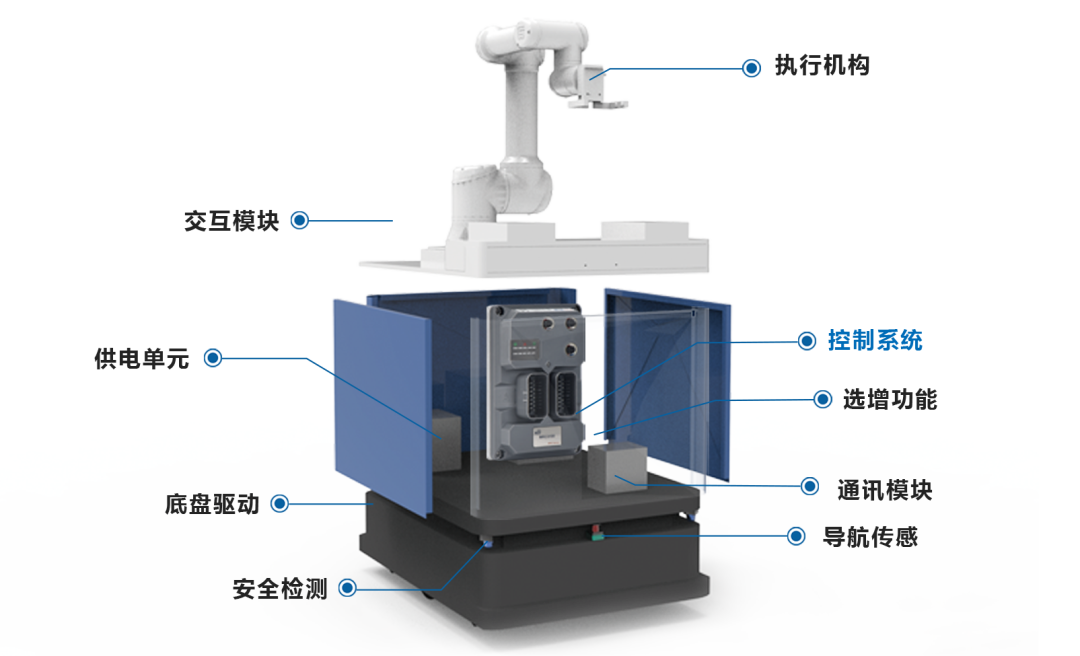
▲协作(复合)移动机器人构成
随着疫情之后下游市场逐渐修复,终端对协作(复合)移动机器人的认可度加速提高,预计2023年-2025年中国协作(复合)移动机器人出货量的平均增速将维持在27%左右,出货量有望突破5万台,市场进入较快发展阶段。

科聪协作(复合)移动机器人解决方案

方案优势:
接口开放第三方设备不受限 整机控制只需一个控制器
移动机器人所有功能都可以通过一个控制器实现,包括导航控制、运动控制、执行机构控制、安全功能控制、交互功能控制(灯、开关、手操器等)等各类功能。
自带丰富的I/O资源和各种通讯接口。无论采用哪种通讯方式,485、232、CAN、以太网还是无线,甚至I/O的电气属性无论是NPN、PNP、源型还是漏型,通通可以直接接入。
超高精度导航控制,满足协作(复合)移动机器人对定位精度的要求,适合各类应用场景
在机器人本体精度支持下,科聪系列控制系统的精度可达到±5mm以内。(当机械臂操作精度要求小于AGV导航到点精度,需要在机械手端部加入视觉识别等寻位传感器。)
无限拓展可能,通过拓展功能最高定位精度可达±1mm,拓宽协作(复合)移动机器人应用场景
支持拓展标志物二次定位、导航激光辅助避障、3D视觉避障等多种功能,并可根据用户需求进行定制。方便应对各类复杂场景,赋能移动机器人更具竞争力。
一站式解决方案,全流程式无忧售后
提供以控制器为核心的整体解决方案,提供客户整机构建的参考意见,大大缩短客户开发时间。提供现场应用方案支持、在线\线下培训、工程支持等全流程式服务,保障项目落地。
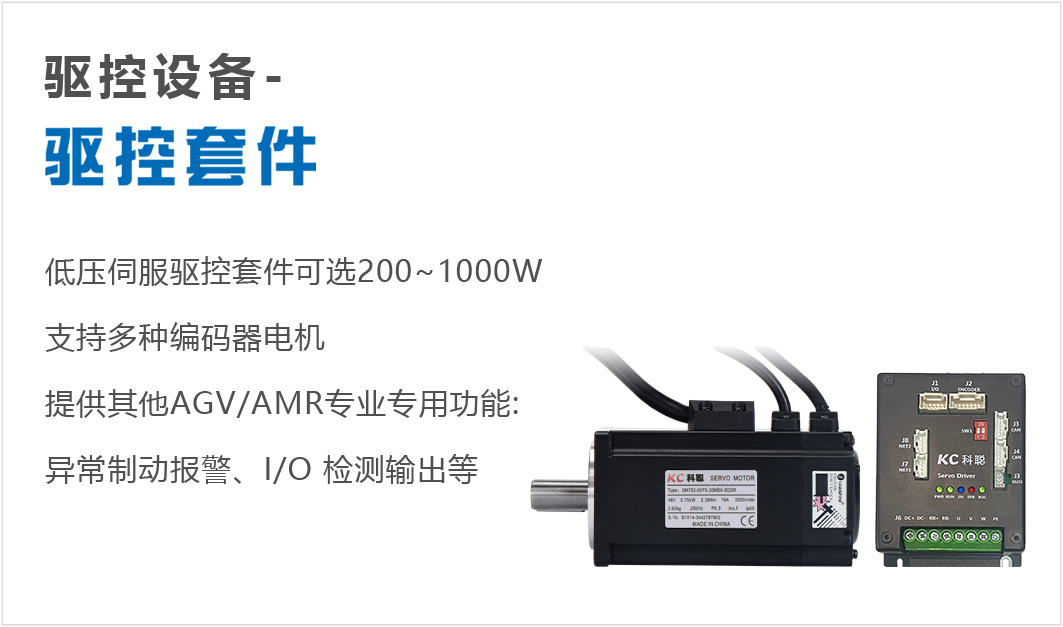
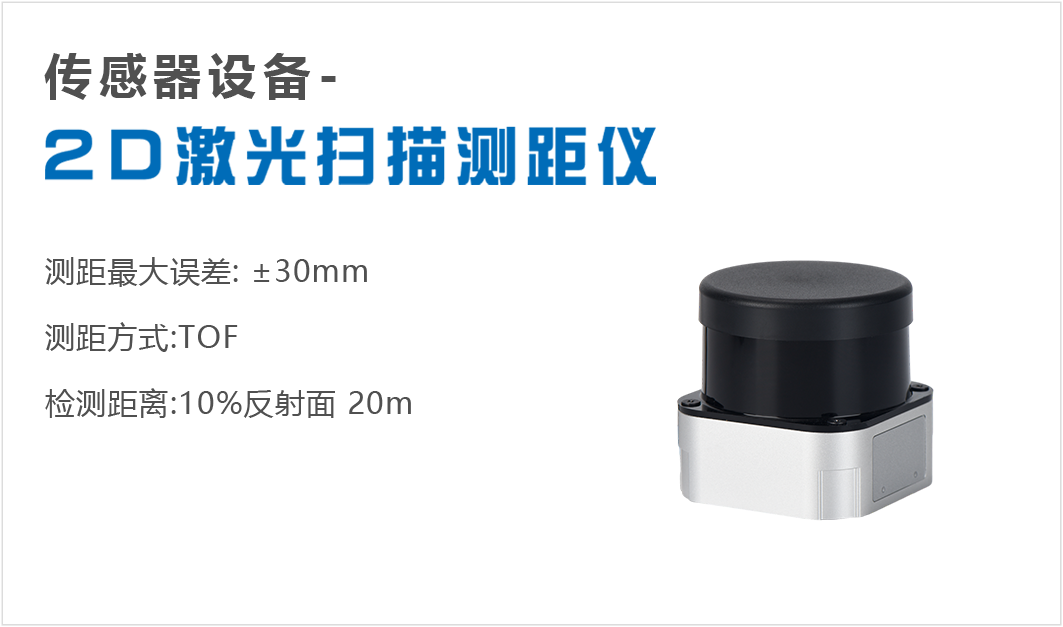
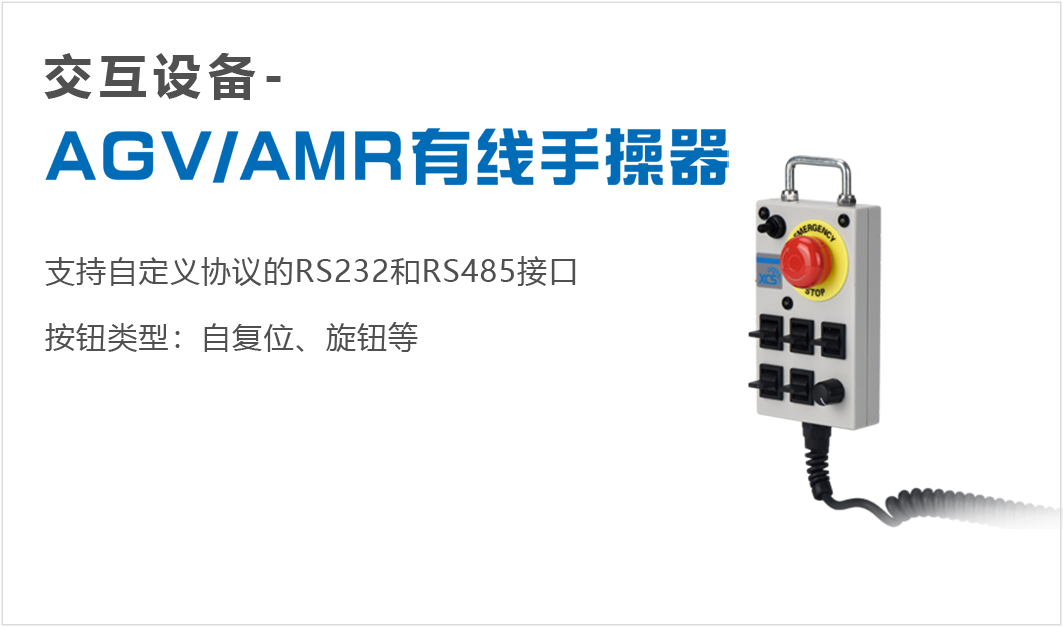
方案产品: