华为 ADS 2.0 发布,城区智驾之战「白热化」
作者 | 马波编辑 | 德新

虽然上海车展还未正式拉开帷幕,但今天的华为却通过一系列新品的发布为今年的汽车盛会进行了预热。
就在今天上午,华为车BU正式发布了一系列新品,同时也对部分现有产品进行了升级。其内容之多、升级的幅度之大,用「牙膏踩爆」形容毫不为过。
华为用一个小时的时间,阐述了车BU五大解决方案的 全面升级 ,分别推出了华为ADS 2.0、鸿蒙OS 3.0、全新的HUAWEI SOUND 、智能车载光、智能汽车数字平台等一系列智能汽车解决方案。
这其中,用户最为期待的就是华为ADS 2.0。
ADS 2.0:重点在于无图也能用
在3月的华为春季发布会上,余承东留下了一个悬念,当时他宣布,问界M5将推出高阶智能驾驶版车型,车辆在不依赖高精地图的情况下,也能带来非常好的智能驾驶体验。今天谜底终于揭晓了。
从今天的发布会内容来看,华为ADS 2.0是在1.0基础上新增了GOD算法的软件栈平台。而什么是GOD网络,我们先按下不表。
首先来看华为给 ADS 2.0 的贴上的四大标签是什么。
余承东称,华为 ADS 2.0 有四大特性,分别是:
- 功能安全领先一代
- 高速更放心、城市更舒心
- 有图无图都能开
- 可见即可泊的智能泊车系统
我们分别来看华为是如何定义这四大标签的。

首先是功能安全一代。
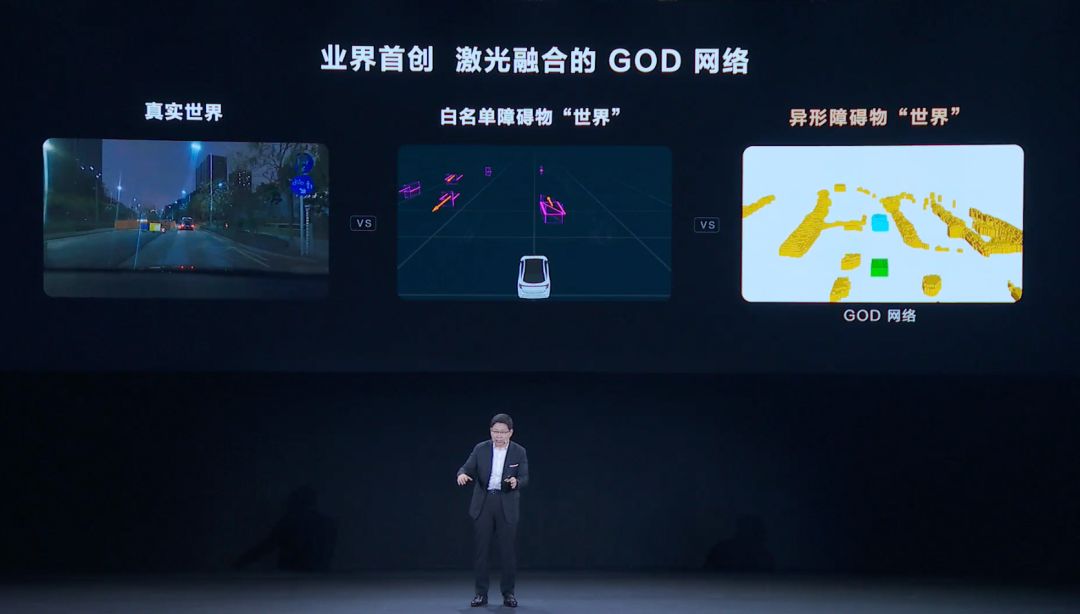
在这里,华为定义的代际包含了主被动安全。第一代指的是安全气囊与安全带;第二代指的是毫米波、视觉与激光雷达探测在内的主动安全功能。而余承东认为,华为 ADS 2.0 在安全性上已经进入了第三代,即在第二代基础上增加了GOD网络。
GOD网络是华为独创的名词,其完整名为 General Obstacle Detection(通用障碍物检测),而通过 PPT 下的注释我们也能看到,这是一种视觉与激光前融合的占据格栅网络。
这个名词是不是熟悉了很多?
我们都知道特斯拉 Autopilot 是业内首个采用 BEV 感知架构的系统,其针对360°的感知融合了时序信息。BEV 让 Autopilot 获得了上帝视角,但是当系统遇到异形障碍时,系统还是要具备出色的应对能力。
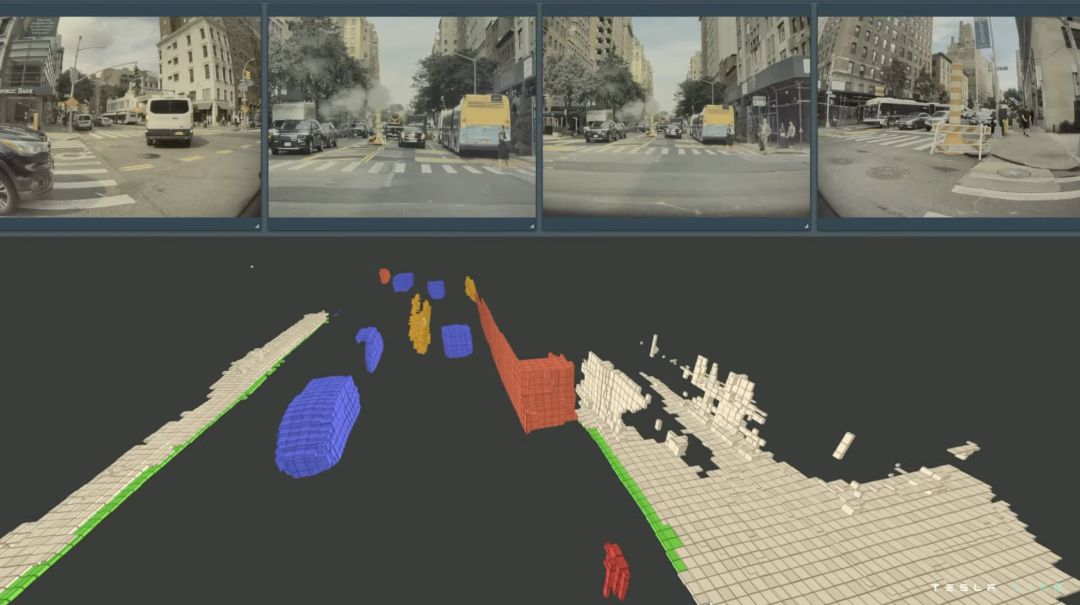
于是在去年特斯拉 AI DAY 上,其研发总监 Ashock 着重分享了 Occupancy Network 占据网络,其本质是将三维空间划分成体素空间。通过 0/1 赋值对空间内的物体进行分类标记。在这张图中,特斯拉将静态物体赋红色、动态障碍物赋蓝色属性,是一种典型的环境重构。
特斯拉利用 Occupancy Network精确地构建出了车辆空间喜爱的特征空间状态,除了交通参与者于道路设施,特斯拉还能够输出路面的可行驶区域。
简单地说,过去的视觉感知会对道路上可能出现的物体进行大量的训练,让系统「认识」它,但是随着环境变得复杂,异形障碍物是无法穷尽的。所以,占据网络另辟蹊径,系统不需要认识它,只需要知道当前空间是无法行驶的即可。
而余承东在今天的发布会上也说了类似的话:「机器需要不断训练才能认识异形障碍物,而人眼即便不认识它,也知道这不是路。」
为了自证「遥遥领先」,华为还进行了专项测试 。

在「前方故障车辆」的识别和紧急制动测试中,ADS 2.0 在时速高达 80 km/h 也能识别并稳稳刹住。而国外某 T 品牌在 40 km/h 的时速下,就撞上了假人+假车组成的异形障碍物。
即便换成目标更小的纸箱,华为 ADS 2.0 也能够在 80 km/h 的时速下做到识别和刹停。
而华为之所以将GOD定调为「业内首创」,其主要原因是华为 ADS 采用的是多传感器融合的方案,即激光雷达、视觉会同时输入,而特斯拉则是纯视觉输入。
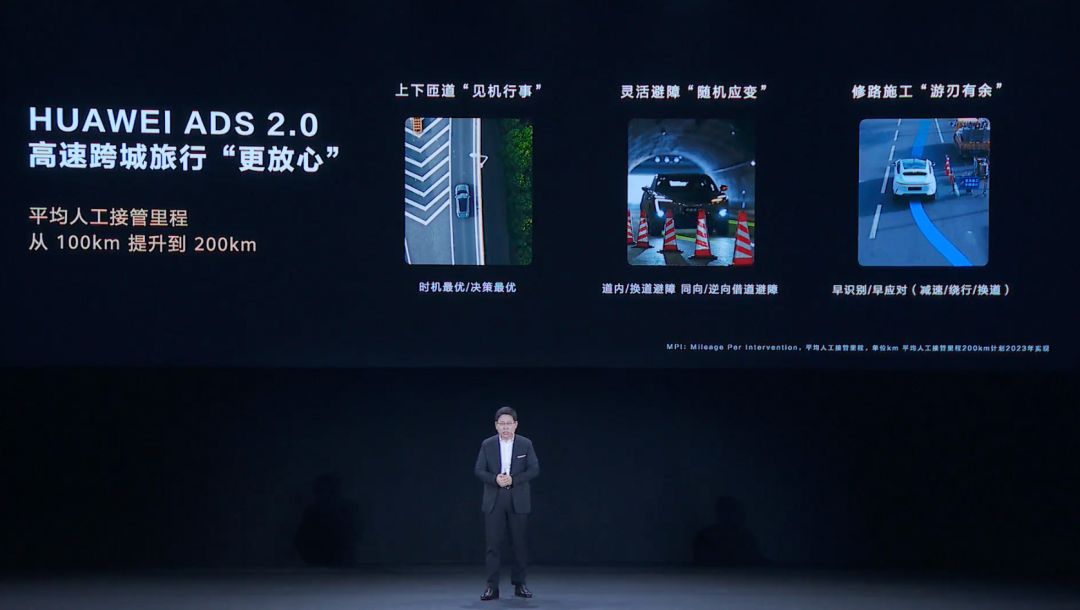
而第二个标签「高速更放心、城市更舒心」更多则是在体验层面。余承东称华为 ADS 2.0 会将高速跨城下的 NCA 接管次数,从过去的 100 km 1 次,提升到 200 km 1 次。
无独有偶,在下午的小鹏汽车分享会上,何小鹏提出:2023 年内实现高速场景每千公里接管次数小于 1 次。
作为国内领先的玩家,华为和小鹏都志在将场景复杂度较低的高速场景做到尽可能的少接管,努力将高速接管趋近于 0。

同时,余承东也称,华为 ADS 2.0 将覆盖 90% 以上的城市场景,覆盖各种类型的路口、人车混行场景、环岛等等。
第三大重要变化则是无图下的能力。华为 ADS 2.0 将减少对高精地图的依赖,更加注重单车的感知能力。
在ADS 1.0 时代,华为采用的是 BEV 模型,ADS 2.0 则加入了道路拓扑推理网络,即输入电子导航信息与动态交通流、静态占用信息,推理道路结构。
余承东再次强调了为何要抛弃高精地图。
第一点,价格昂贵,仅仅是上海市 9000 公里道路,华为用了一两年时间也没有完全才完,何谈全国上百万公里道路。
第二点则是更新慢,高精地图受制于安全监管,几个月才能更新一次,根本无法满足智能驾驶的迭代需求。
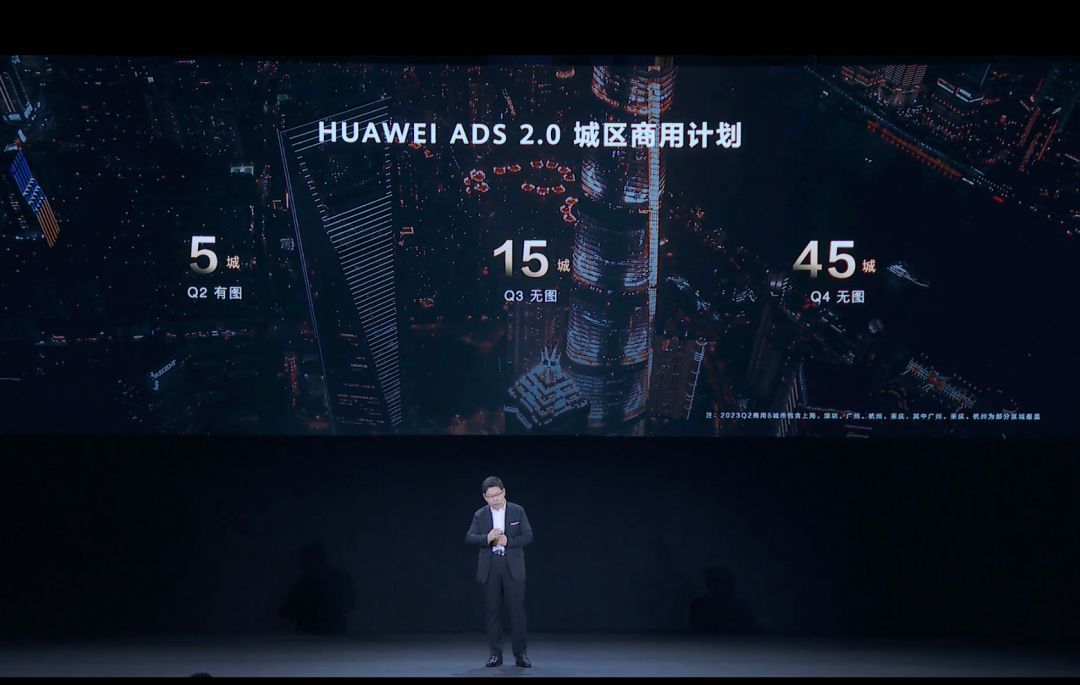
在商业落地规划方面,华为计划到今年Q2实现5个城市的城区NCA落地(依赖高精地图);今年Q3实现15个城市的落地(无图);而到了Q4,则泛化至45个城市。
第四点则是泊车。

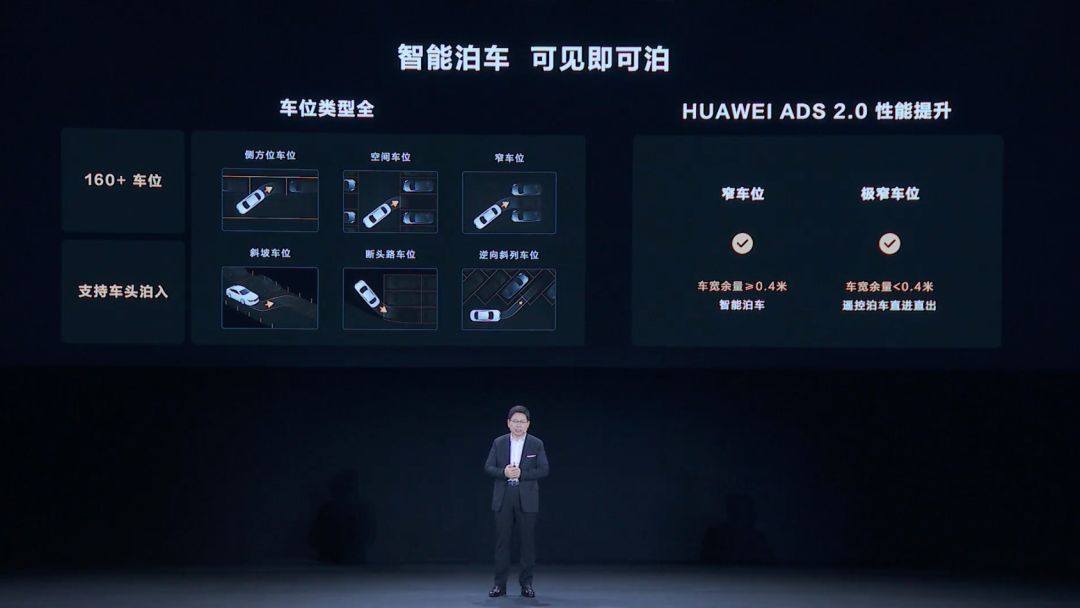
在 ADS 1.0 时期,其泊车能力已经是行业顶尖水准。而 2.0 的升级主要展现在两点。
第一,系统搜索能力得到加强,ADS 2.0 下,系统能够识别 360° 的车位;同时,能够泊入的车位类型也会更多,甚至支持车头泊入。
第二,ADS 2.0 将会在年底实现 机械车位泊车 。机械车位最大的难度在于,车位不仅更窄,两侧还有较低的金属路肩,对于感知的精度要求会更高。
代客泊车功能一直是不温不火的状态。但是华为也有所布局,华为 ADS 2.0 将做到跨越地面和地下停车场的代客泊车,且目标车位被占用时也能自主漫游寻找新的车位。


最后,余承东宣布,华为 ADS 2.0 将会在问界 M5 高阶智能驾驶版车型上首发。
同时,阿维塔11全系、极狐阿尔法S HI也会搭载,除此以外还有十多款未官宣车型,将陆续上线 ADS 2.0。
在合作模式上,余承东强调了两点。首先,华为并未与极狐终止合作,双方的合作模式已由 HI 模式升级为智选模式。同时,余承东重申华为不造车战略,帮助车企造好车。
为什么我们期待华为 ADS 2.0?
最后,谈一谈为何我们期待华为 ADS 2.0。首先,华为的战略是帮助车企造好车。在智能化浪潮下,头部新势力选择自研,但总有车企需要外部力量。即便「灵魂」不在自己手里,但是联合强大的供应商,打造体验出色的产品,也能够形成竞争力。
阿维塔与极狐都是华为 ADS 的战略伙伴,所以智驾上的表现不分伯仲,但是这两台的定位与性格是完全不同的,差异化也能够通过其他特性得到体现。
第二点则是体验层面。华为 ADS 1.0 的表现尹然是行业头部级别,但是过分依赖高精地图严重影响了场景泛化,这使得高阶智驾成为了少数人的尝鲜产品,很难推到中小城市。而泛化则会影响功能的商业化落地,这是一种不太利于行业发展的循环,所以我们非常期待全新软件栈下的 ADS 2.0。
还有一点,小鹏在智能驾驶的研发和工程落地上走在前列,XNet 的目标也是在无图场景下提升用户的 NGP 使用体验。XNGP这张牌打出来,行业需要有人能跟的,而华为就是当下在智驾领域最有能力与小鹏相爱相杀的对手。