C++加持让python程序插上翅膀——利用pybind11进行c++和python联合编程示例
目录
- 0、前言
- 1、安装 pybind11库
- c++侧
- python侧
- 2、C++引入bybind11
- vs增加相关依赖及设置
- cpp中添加头文件及导出模块
- cpp中添加numpy相关数据结构的接收和返回
- 编译生成dll后改成导出模块同名文件的.pyd
- 3、python调用c++
- 4、C++引入bybind11
0、前言
在当今的计算机视觉和机器学习领域,Python 和 C++ 是两种最常用的编程语言。Python 以其简单易学、高效编程和强大的科学计算库而闻名,而 C++ 则以其高效性和强大的计算能力而著称。然而,这两种语言各有优劣,因此将它们结合起来使用可以发挥它们的优点,同时弥补它们的缺点。在本文中,我们将介绍如何在 Windows VS 环境下使用 pybind11 进行 C++ 和 Python 联合编程示例,进行机器视觉和相机位姿优化相关的程序开发。我们将使用 Python 3.7 和 C++,并利用 numpy 数组格式接收 Python 侧的两幅图像,并利用 g2o 进行 BA 优化,最后将优化结果以 numpy 数组形式返回 Python。

1、安装 pybind11库
首先,我们需要安装 pybind11 库。pybind11 是一个用于将 C++ 代码绑定到 Python 解释器的库,它提供了一种简单的方法来创建 Python 模块,这些模块可以直接调用 C++ 代码。
c++侧
pybind11库是一个纯头文件的库,其实只要从github上下载源码,即可供使用。
git clone https://github.com/pybind/pybind11.git
python侧
python侧,可以进入conda虚拟环境,注意需要3.7版本的python,直接pip安装:
pip install pybind11
2、C++引入bybind11
安装 pybind11 库后,我们可以开始编写 C++ 代码。以g2o ba为例,我们将上篇博文中的c++代码进行稍加改造,开个python的调用“接口”即可:
vs增加相关依赖及设置
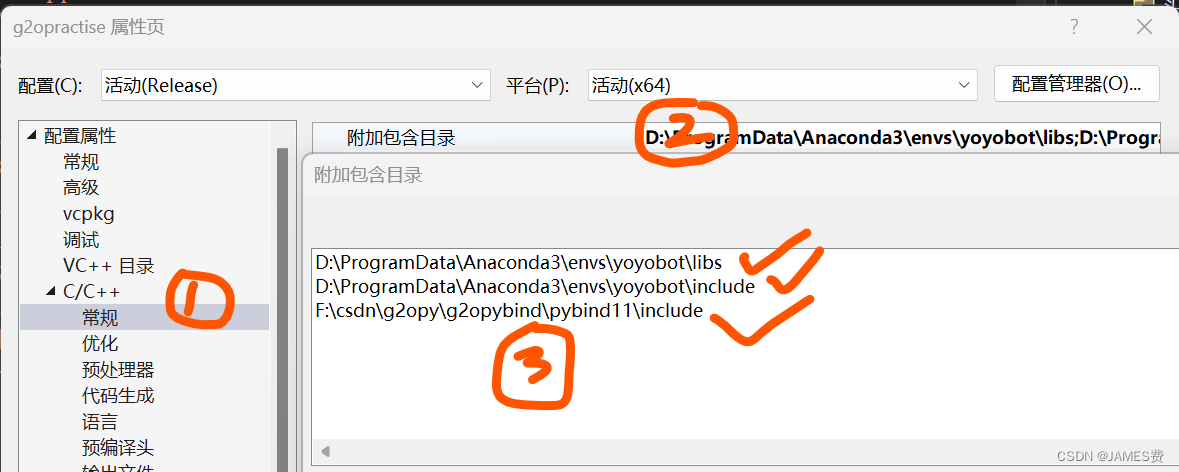
使用bybind11,需要将下载的头文件路径引入项目,同时,需要将python3.7的头文件路径及lib引入及链接进项目。
(1)头文件路径加入:
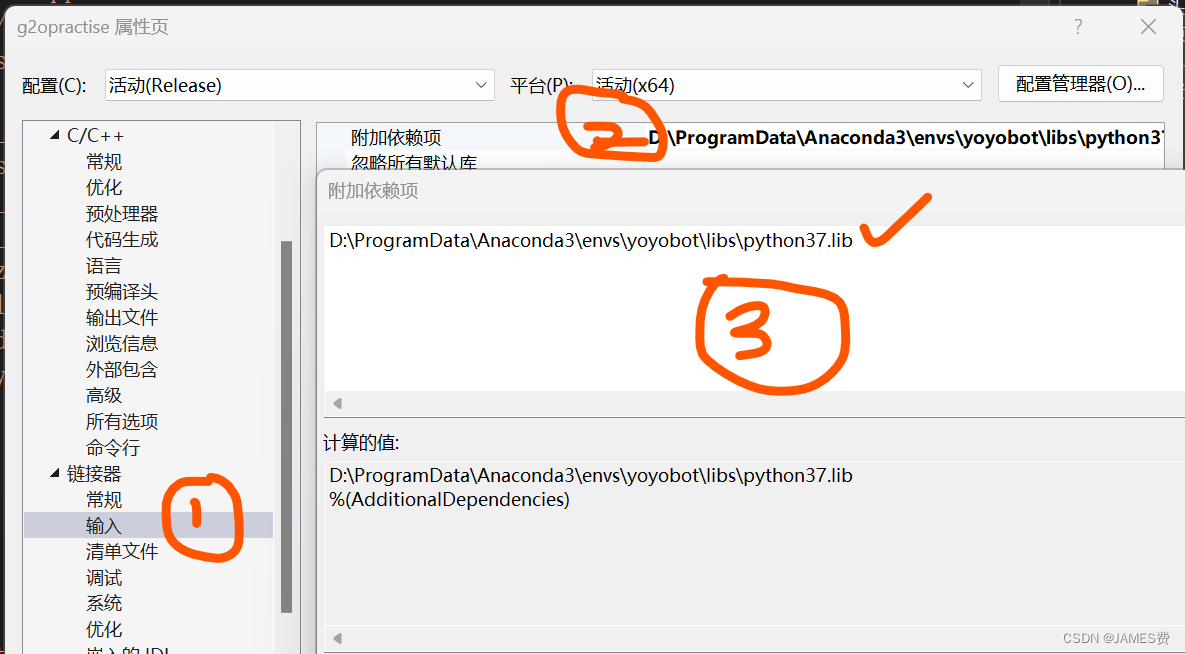
(2)python3.7的lib加入:
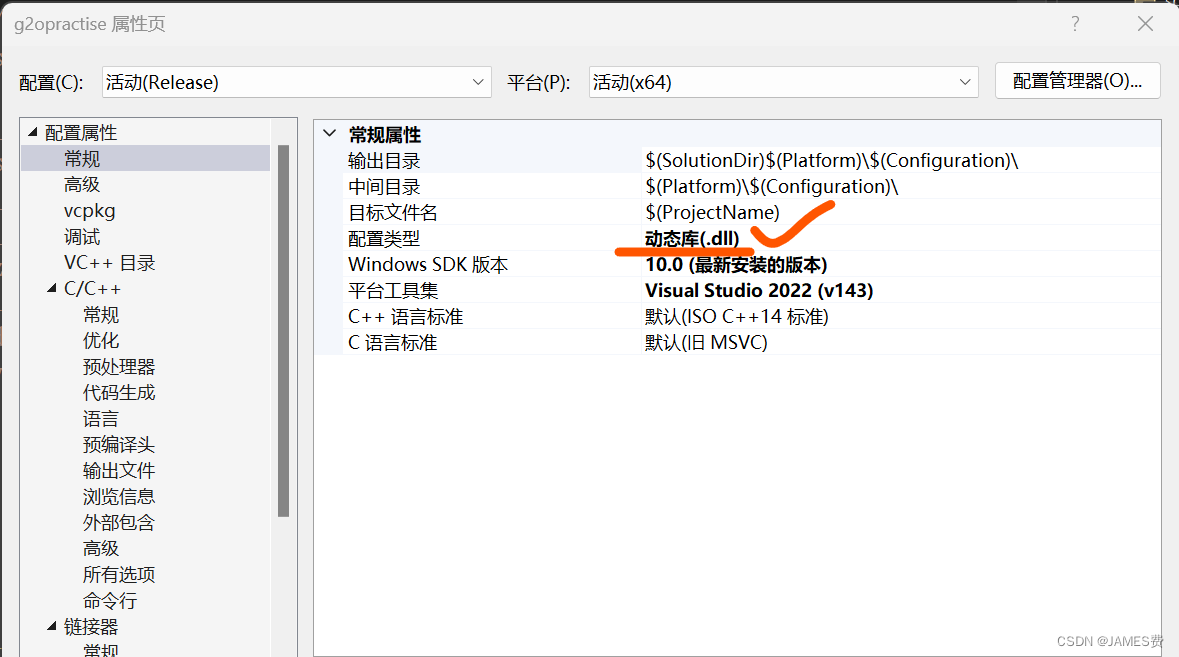
(3)生成动态库dll类型:
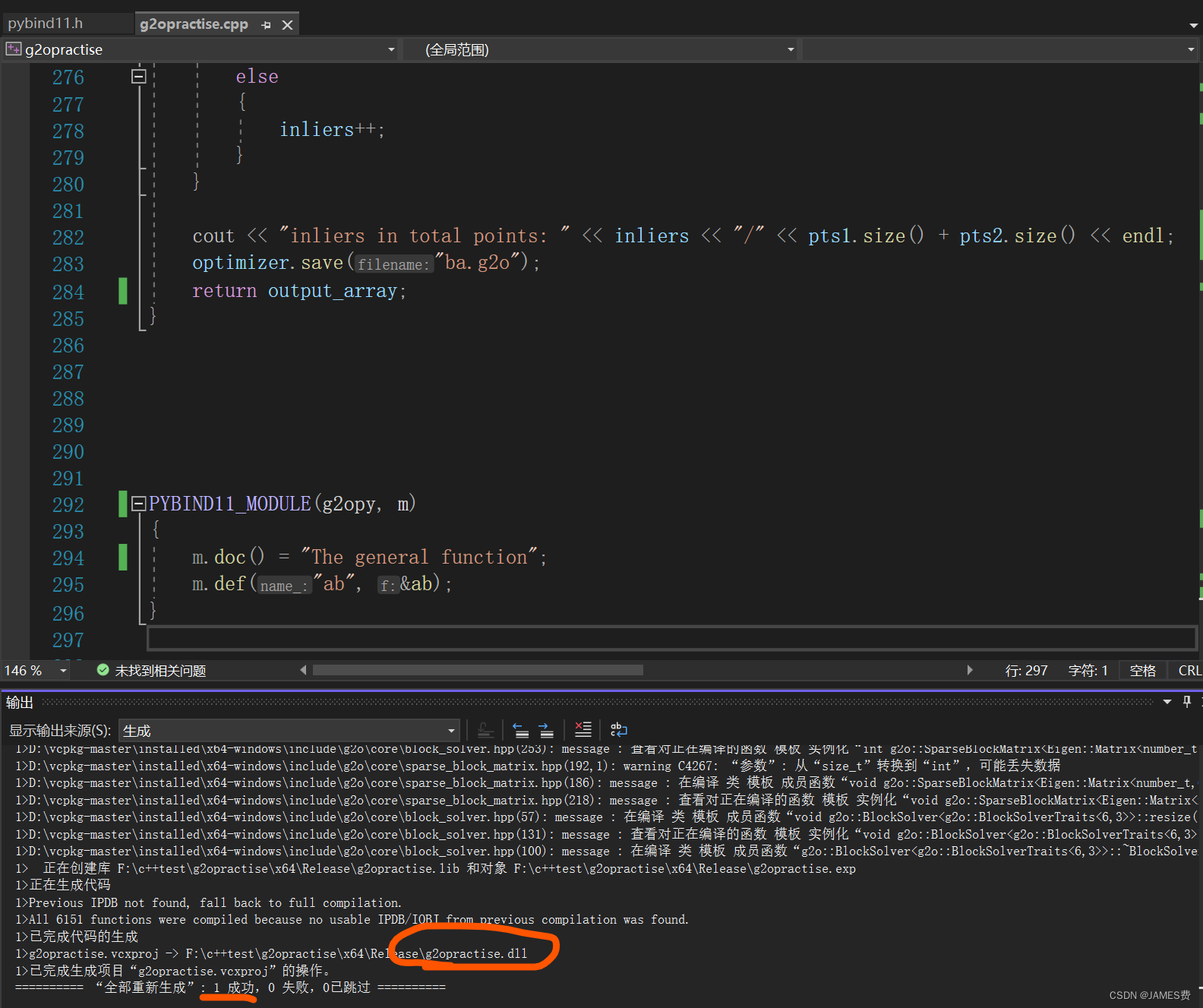
cpp中添加头文件及导出模块
在c++程序中去掉main函数,添加头文件,及导出模块设置:
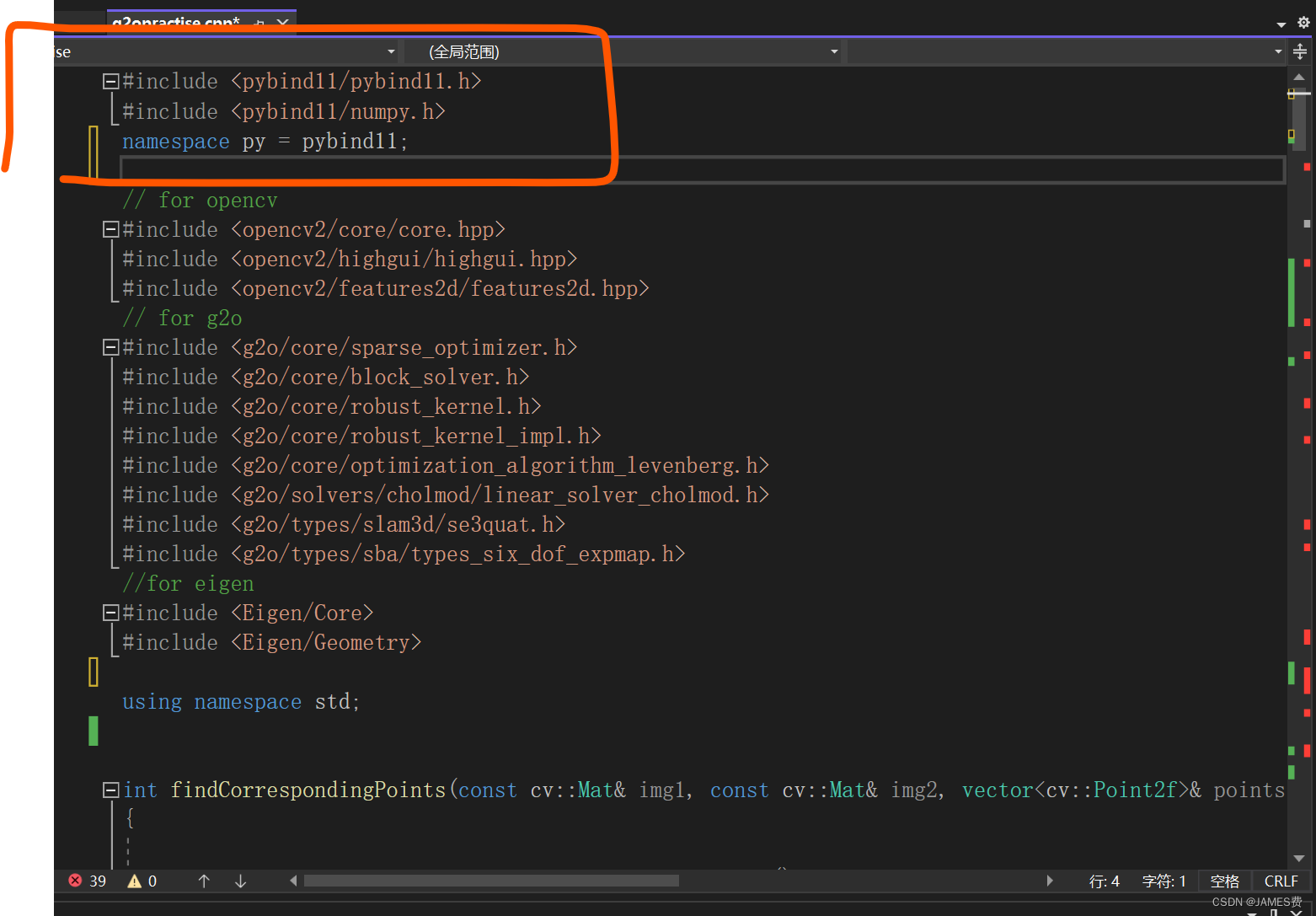
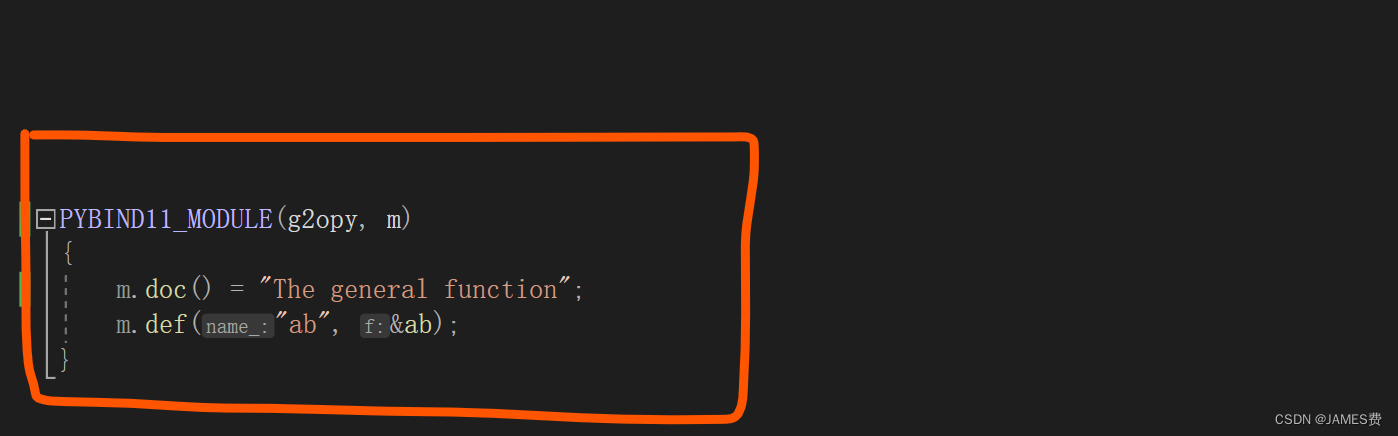
如上两图,在常规c++文件中首位加入头文件和导出模块定义,我们这次导出的是ab这个函数,ab是将上篇博文的main函数改成的。
cpp中添加numpy相关数据结构的接收和返回
// 将Python中的图像传递给C++进行处理
py::array_t<double> ab(py::array_t<uint8_t> &imge1, py::array_t<uint8_t> &imge2){
//创建全0 numpy数组
py::array_t<double> output_array({3,4});
auto buf = output_array.mutable_data();
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 4; j++) {
buf[i * 4 + j] = 0;
}
}
// 将输入图像转换为OpenCV的Mat对象
auto bufimg1 = imge1.request();
auto bufimg2 = imge2.request();
int type = CV_8UC3;
int channels = 3;
if (bufimg1.ndim == 3) {
channels = bufimg1.shape[2];
if (channels == 4) {
type = CV_8UC4;
}
}
//如果不是3或4通道则退出
if (channels != 3 && channels != 4) {
return output_array;
}
cv::Mat img1(bufimg1.shape[0], bufimg1.shape[1], type, bufimg1.ptr);
cv::Mat img2(bufimg2.shape[0], bufimg2.shape[1], type, bufimg2.ptr);
如上,我们ab函数,可以接收来自python的图像numpy数组,并将图像转化为了cv::mat格式,交给c++后续处理。最后返回numpy形式的g2o优化后的位姿数组:
g2o::VertexSE3Expmap* v = dynamic_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(1));
Eigen::Isometry3d pose = v->estimate();
// 获取输出数组的指针
auto output_ptr = output_array.mutable_data();
// 将isometry的旋转矩阵和平移向量存储在numpy数组中
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> result_map(output_ptr);
result_map.block<3, 3>(0, 0) = pose.rotation().matrix();
result_map.block<3, 1>(0, 3) = pose.translation();
return output_array;
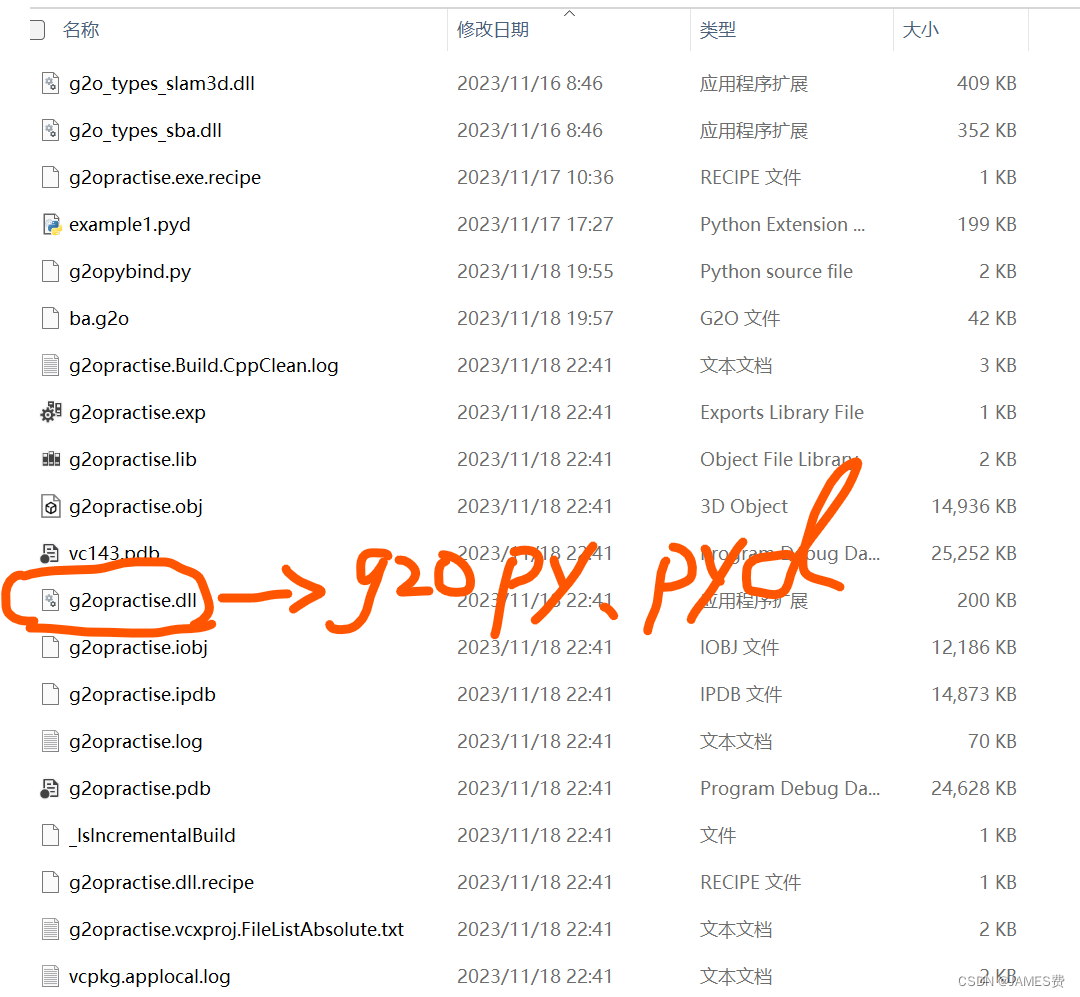
编译生成dll后改成导出模块同名文件的.pyd
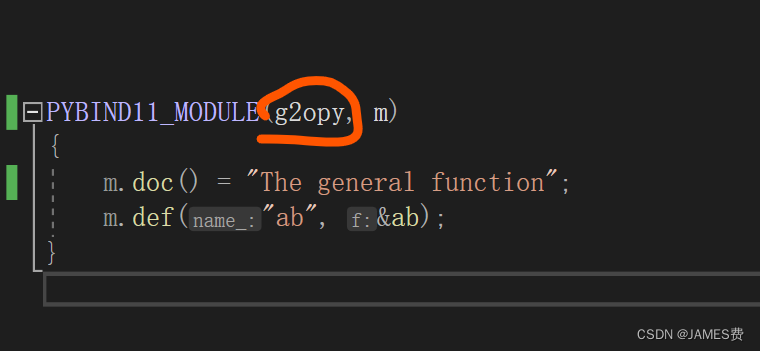
将生成的dll改成g2opy.pyd
3、python调用c++
进入与c++依赖的同一个python环境,然后编辑简单的调用程序:
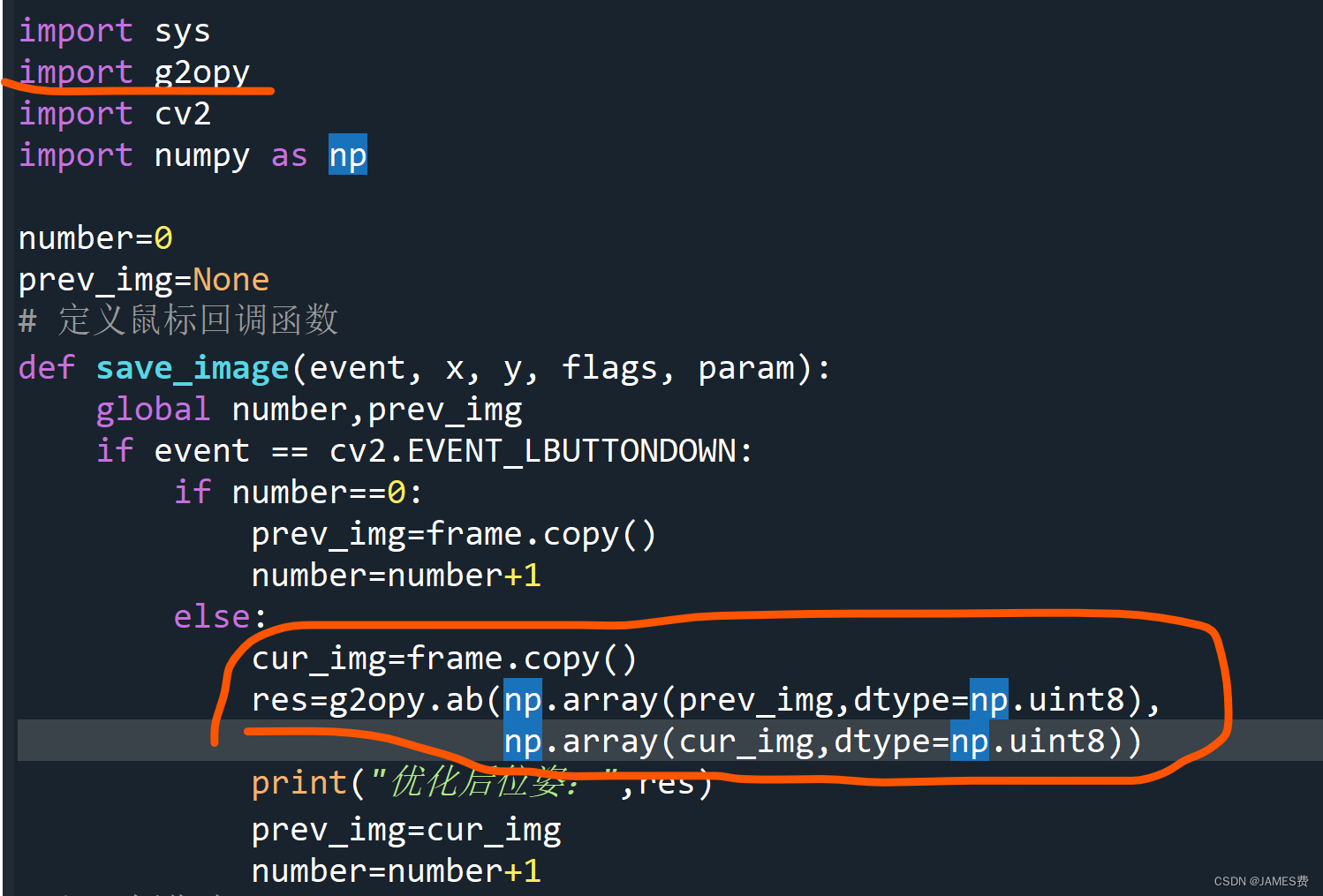
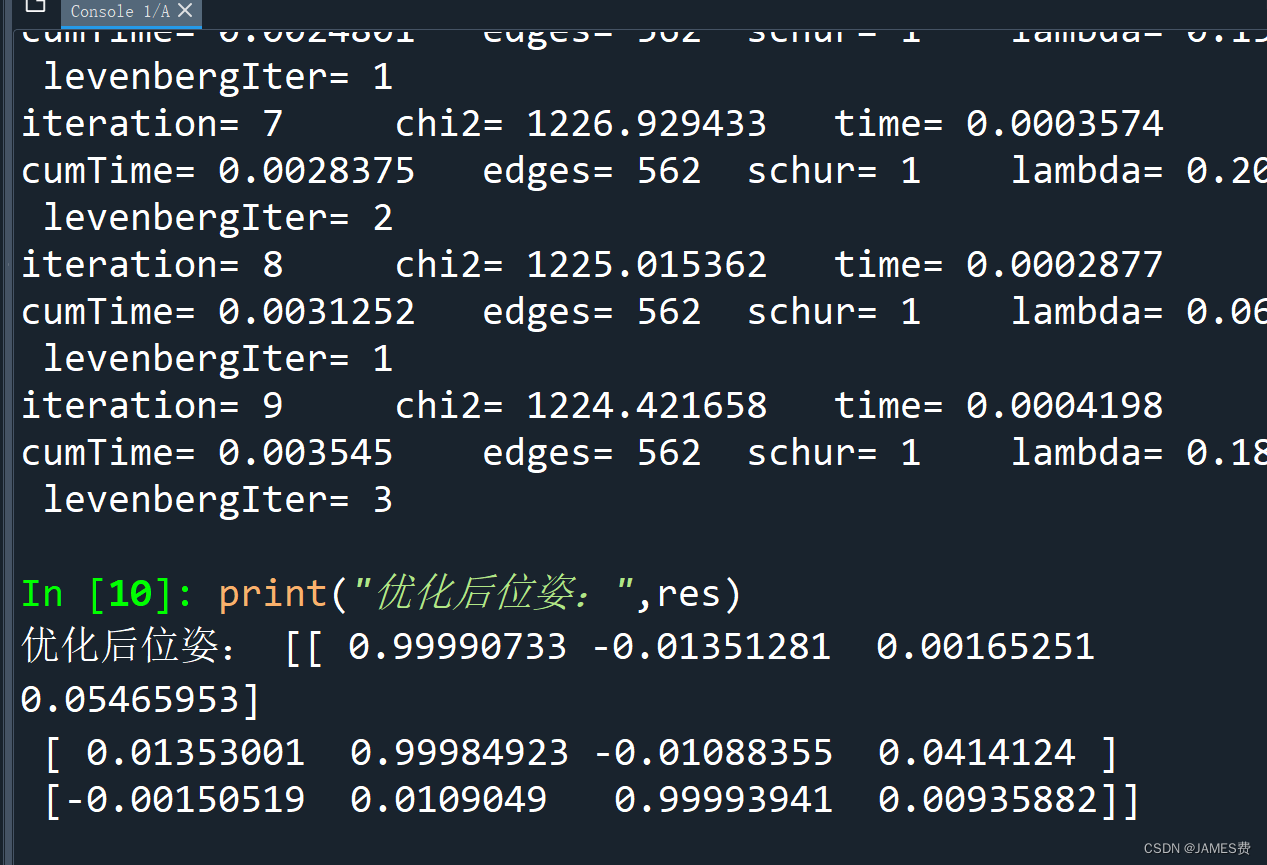
两帧图像送入c++,优化计算后返回输出:
本篇所有源码已上传,链接如下:
python实现C++程序g2o的ba优化模块调用,python侧的程序资源
本资源为python和C++联合编程的示例vs工程源码
4、C++引入bybind11
通过本文的示例,我们验证了如何在 Windows VS 环境下使用 pybind11 进行 C++ 和 Python 联合编程的可行性,可进一步进行机器视觉和相机位姿优化相关的程序开发。
有了C++的加持,python的机器人开发在性能上或者是解决方案上,又有了更多的可选项。可以发挥python的更大威力了,keep go on!