汽车电子 -- 车载ADAS之DOW(开门预警 )
国际标准:
- DOW:
GB/T XXXXX—XXXX 乘用车车门开启预警系统性能要求及试验方法
一、开门预警 DOW(Door open Warning)
参看:功能定义-开门碰撞预警
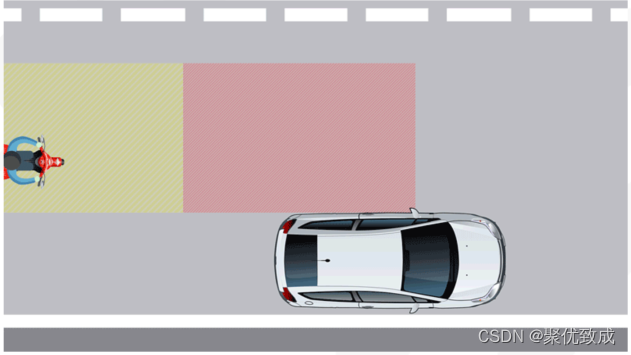
在停车状态即将开启车门时,监测车辆侧方及侧后方的其它道路使用者,并在可能因车门开启而发生碰撞危险时发出警告信息的系统。
1、性能要求:
在车辆静止状态下,系统应在车门开启且与其他交通参与者存在碰撞风险时对驾乘人员发出警告信息。
左侧报警要求
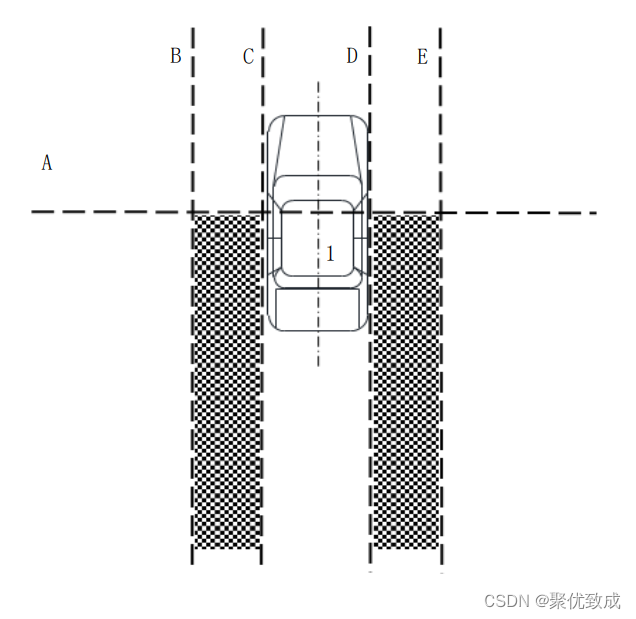
在满足以下要求时系统应发出左侧警告信息:
- 目标的所有部位位于线 A 的后方;
- 目标的任何部位位于线 B 的右侧;
- 目标的所有部位位于线 C 的左侧;
- 目标与本车的 TTC 小于等于 1.5 s;
- 左侧任一车门开启。
右侧报警要求
在满足以下要求时系统应发出右侧警告信息:
- 目标的所有部位位于线 A 的后方;
- 目标的所有部位位于线 D 的右侧;
- 目标的任何部位位于线 E 的左侧;
- 目标与本车的 TTC 小于等于 1.5 s;
- 右侧任一车门开启。
报警区域
- 线A平行于试验车辆前缘,并位于车辆左右外后视镜最后端处;
- 线B平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘(不包括外后视镜)相距1.5 m;
- 线C平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)左侧的最外缘;
- 线D平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)右侧的最外缘;
- 线E平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘(不包括外后视镜)相距1.5 m。
以上就可以划定左侧报警区域为:
横向:0m ~ 1.5m
纵向:-50 ~ 门
功能要求
1、车速范围:0km/h【不受挡位影响】
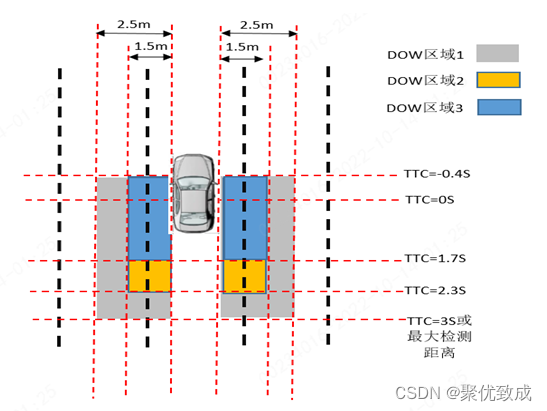
2、DOW根据开门状态,分为两种:
- 车门未打开:
区域1:当3s>TTC≥2.3s时,触发一级报警,提供视觉警告。
区域2:当2.3s>TTC≥1.7s时,触发一级报警,提供视觉警告。
区域3:当1.7s>TTC≥-0.4s时,触发一级报警,同时激活车门保持功能,单次打开车门失效。
当存在威胁时,对应侧的所有车门均发出有效警告或保持功能。 - 车门打开:
区域1、2、3:当3s>TTC≥-0.4s时,触发二级报警,提供视觉和(听觉或触觉)警告。
当存在威胁时,对应侧的所有车门均发出有效警告或保持功能。
3、车速>0km/h 功能抑制。
4、目标车辆退出报警区域后0.5s结束报警。