当前位置: 首页 > article >正文 商用车的智慧眼车规级激光雷达 article 2025/2/22 2:25:16 1、商用车×自动驾驶技术:巨大的降本增效空间 2、感知是第一步:看懂环境路况才能安全的自动驾驶 3、多传感器融合,感知信息冗余,保障自动驾驶安全 4、商用车需要什么样的激光雷达 5、车规级激光雷达的软硬件成熟度及延展性 (1)需要更强的硬件性能 (2)更耐用,更可靠 (3)生命周期内成本可控 查看全文 http://www.kler.cn/a/148399.html 相关文章: java 系统属性和环境属性 计算机网络基础知识自用 【微服务专题】微服务架构演进 Spring Boot 3.2.0 虚拟线程初体验 (部分装配解析) Linux内存管理(六十四):ION 内存管理器——system heap VMware虚机重启后静态IP不生效 QT linux下应用程序打包 uni-app中vue3+setup实现下拉刷新、上拉加载更多效果 角色管理--高级产品经理岗 uniapp 导航分类 Vue表单的整体处理 成为AI产品经理——模型评估概述 GeoTrust证书 96.STL-遍历算法 transform 文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《考虑碳排放分摊的综合能源服务商交易策略》 HttpRunner原来还能这么用,大开眼界!!! WPF创建进度条 「计算机网络」Cisco Packet Tracker计算机网络仿真器的使用 YOLOv5算法进阶改进(5)— 主干网络中引入SCConv | 即插即用的空间和通道维度重构卷积 android项目之调用webview
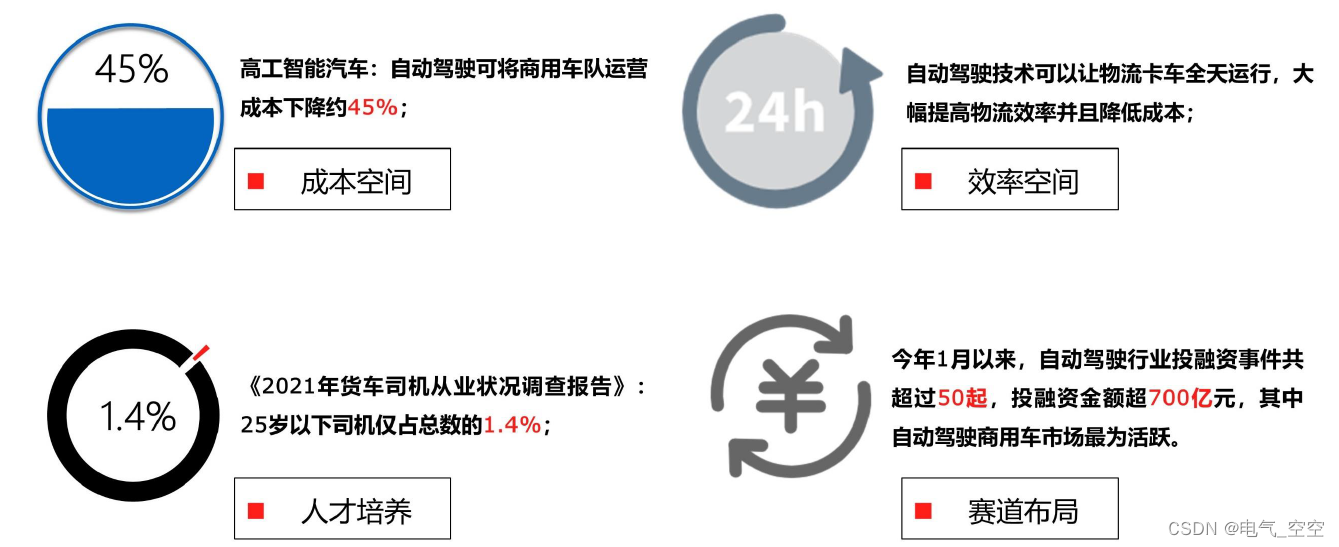
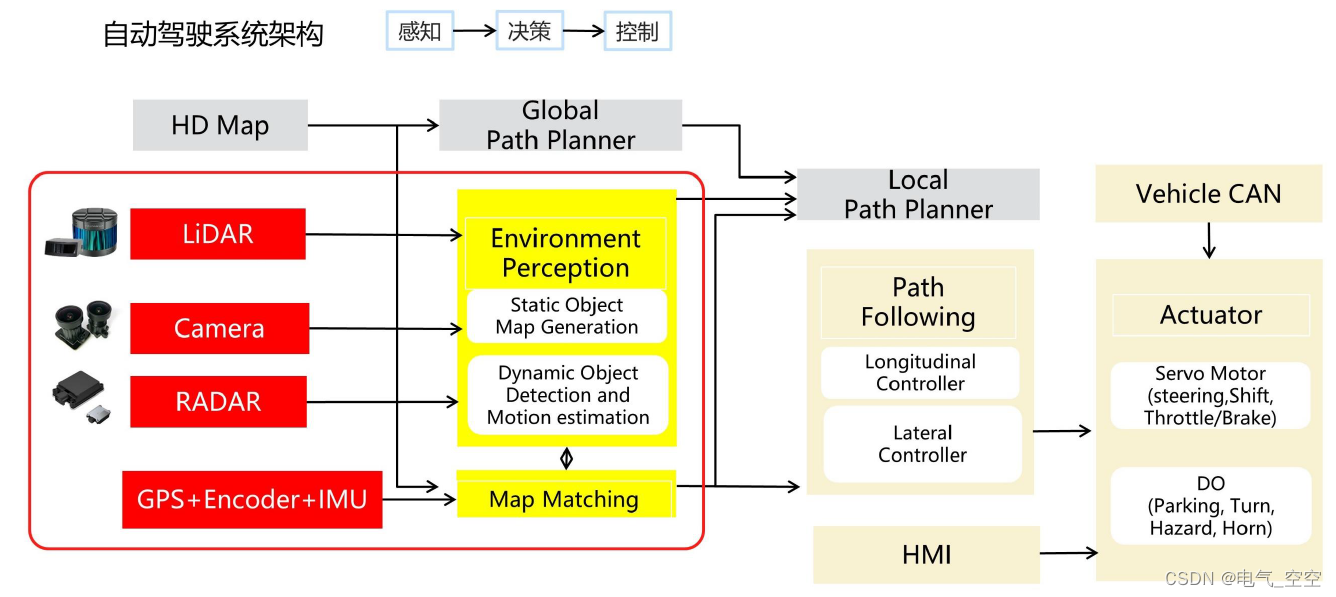
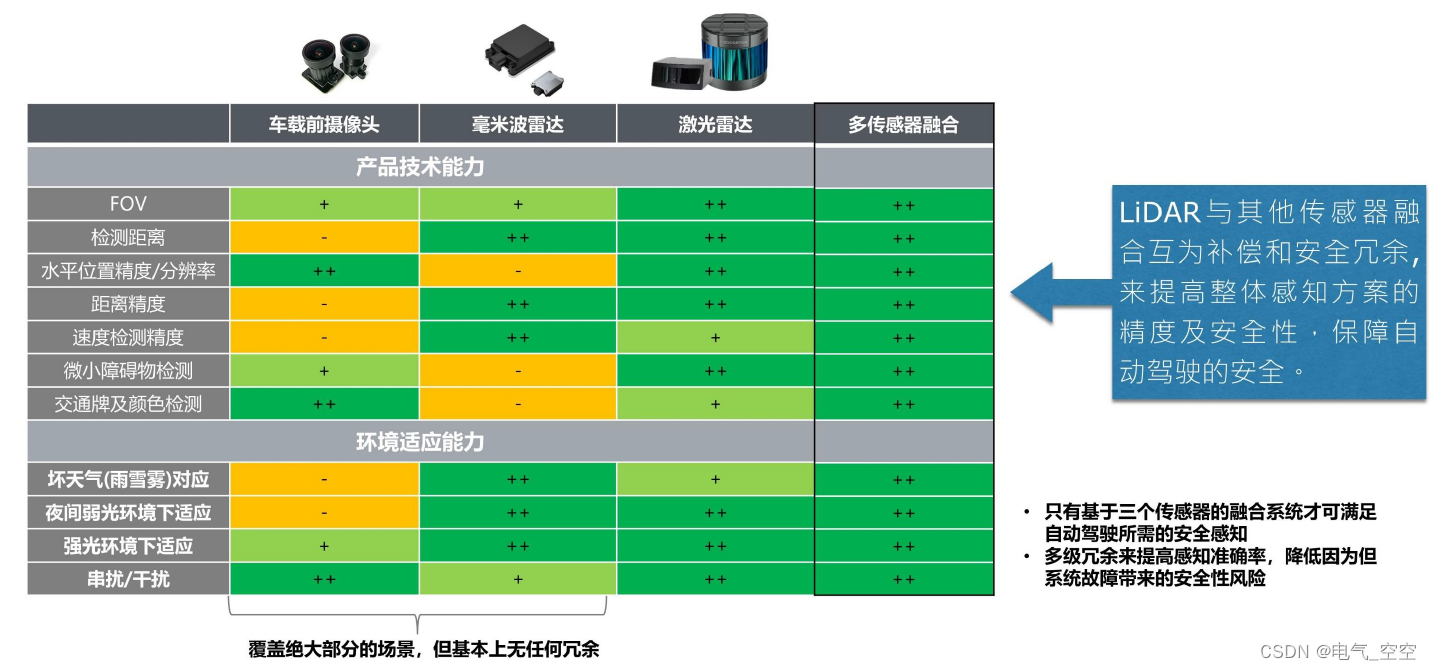
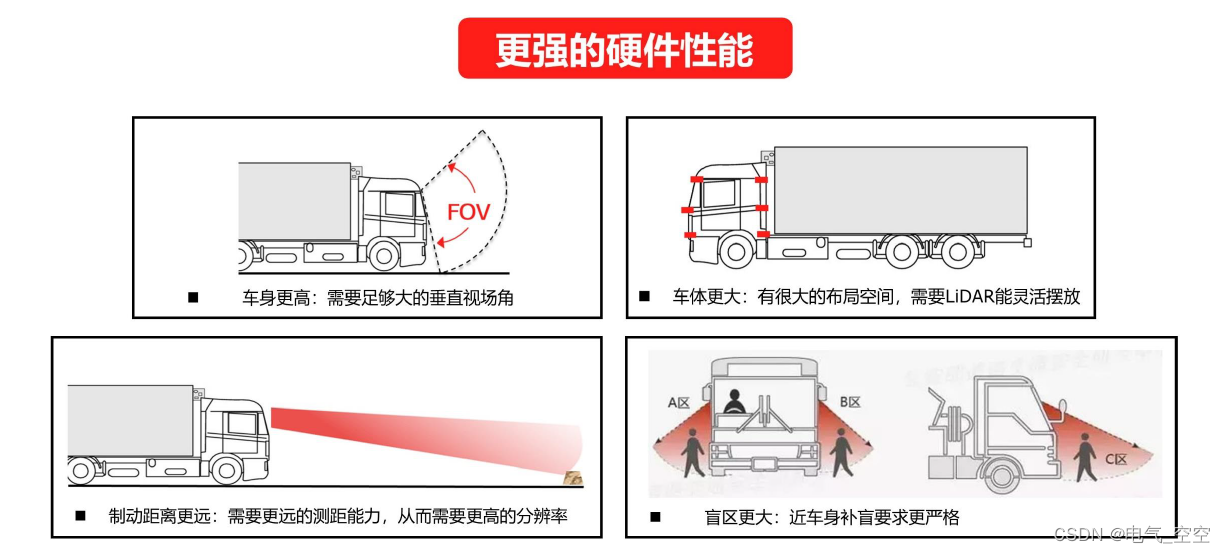
1、商用车×自动驾驶技术:巨大的降本增效空间 2、感知是第一步:看懂环境路况才能安全的自动驾驶 3、多传感器融合,感知信息冗余,保障自动驾驶安全 4、商用车需要什么样的激光雷达 5、车规级激光雷达的软硬件成熟度及延展性 (1)需要更强的硬件性能 (2)更耐用,更可靠 (3)生命周期内成本可控 查看全文 http://www.kler.cn/a/148399.html 相关文章: java 系统属性和环境属性 计算机网络基础知识自用 【微服务专题】微服务架构演进 Spring Boot 3.2.0 虚拟线程初体验 (部分装配解析) Linux内存管理(六十四):ION 内存管理器——system heap VMware虚机重启后静态IP不生效 QT linux下应用程序打包 uni-app中vue3+setup实现下拉刷新、上拉加载更多效果 角色管理--高级产品经理岗 uniapp 导航分类 Vue表单的整体处理 成为AI产品经理——模型评估概述 GeoTrust证书 96.STL-遍历算法 transform 文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《考虑碳排放分摊的综合能源服务商交易策略》 HttpRunner原来还能这么用,大开眼界!!! WPF创建进度条 「计算机网络」Cisco Packet Tracker计算机网络仿真器的使用 YOLOv5算法进阶改进(5)— 主干网络中引入SCConv | 即插即用的空间和通道维度重构卷积 android项目之调用webview