matlab基于线性二次调节器(LQR)法实现机器人路径规划可变轨迹跟踪
1、内容简介
略
可以交流、咨询、答疑
2、内容说明
基于线性二次调节器(LQR)法实现机器人路径规划可变轨迹跟踪
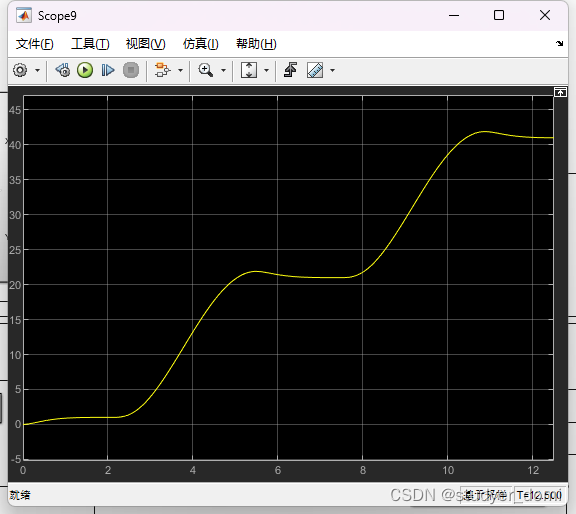
3、仿真分析
略
load path.mat
%% 轨迹处理
% 定义参考轨迹
refPos_x = path(:,1);
refPos_y = path(:,2);
refPos = [refPos_x, refPos_y];
% 计算航向角和曲率
diff_x = diff(refPos_x) ;
diff_x(end+1) = diff_x(end);
diff_y = diff(refPos_y) ;
diff_y(end+1) = diff_y(end);
derivative1 = gradient(refPos_y) ./ abs(diff_x); % 一阶导数
derivative2 = del2(refPos_y) ./ abs(diff_x); % 二阶导数
refHeading = atan2(diff_y , diff_x); % 航向角
traj_x=refPos_x;
traj_y=refPos_y;
4、参考论文
略
链接:https://pan.baidu.com/s/1AAJ_SlHseYpa5HAwMJlk1w
提取码:rvol