泊车功能专题介绍 ———— 记忆泊车评价规程(征求意见稿)
文章目录
- 评价方法
- 指标体系
- 指标权重分配
- 算分方法
- 指标得分计算方法
- 露天停车场一键召唤得分情况说明
- 泊出能力得分情况说明
- 水平划线车位——两侧存在静止车辆
- 水平划线车位——两侧存在静止车辆且车位附近有静止直立儿童
- 垂直划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆且车位附近有静止直立儿童
- 斜列划线车位——两侧存在静止车辆
- 巡航能力得分情况说明
- 召唤过程行进方向遇到静止车辆
- 召唤过程行进方向遇到车辆驶出车位
- 召唤过程行进方向遇到行人缓行
- 召唤过程行进方向遇到有遮挡的儿童横穿
- 召唤过程行进方向遇到临时交通障碍物
- 室内停车场一键召唤得分情况说明
- 泊出能力得分情况说明
- 立柱车位单侧有静止车辆
- 立柱车位单侧有静止车辆且泊出过程中有静止直立儿童
- 墙面车位单侧有静止车辆
- 单层巡航能力得分情况说明
- 单层召唤过程行进方向遇到静止车辆
- 单层召唤过程行进方向遇到静止行人
- 单层召唤过程行进方向遇到临时交通障碍物
- 跨层巡航能力得分情况说明
- 跨层召唤过程遇到儿童
- 跨层召唤过程遇到锥桶
- 露天停车场一键泊车得分说明
- 泊入能力
- 水平划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆且车位有直立儿童
- 垂直划线车位——两侧存在静止车辆且车位内存在锥桶
- 斜列划线车位——两侧存在静止车辆
- 巡航能力
- 车位搜寻过程中遇到车辆制动
- 车位搜寻过程遇到车辆驶出车位
- 车位搜寻过程遇到行人缓行
- 车位搜寻过程遇到有遮挡儿童横穿
- 车位搜寻过程遇到临时交通障碍物
- 搜寻目标车位存在锥桶,相邻车位空余
- 室内停车场一键泊车得分说明
- 泊入能力
- 立柱车位——单侧有静止车辆
- 立柱车位——单侧有静止车辆且车位内有平躺儿童
- 立柱车位——单侧有静止车辆且车位内有锥桶
- 墙面车位——单侧有静止车辆
- 单层巡航能力
- 单层车位搜寻过程遇到静止车辆
- 单层车位搜寻过程遇到静止行人
- 单层车位搜寻过程遇到临时交通障碍物
- 搜寻目标车位存在锥桶,相邻车位空余
- 跨层巡航能力
- 跨层车位搜寻过程遇到儿童
- 跨层车位搜寻过程遇到儿童锥桶
- 说明书审查得分说明
- 系统状态提示得分说明
- 驾驶员状态监测得分说明
- 驾驶员低头
- 驾驶员闭眼
- 风险处置得分说明
- 道路闭塞
- 摄像头失效
- 系统断电
- 试验项目
- 露天停车场一键召唤测试方法
- 泊出能力
- 水平划线车位——两侧存在静止车辆
- 水平划线车位——两侧存在静止车辆且车位附近有静止直立儿童
- 垂直划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆且车位附近有静止直立儿童
- 斜列划线车位——两侧存在静止车辆
- 巡航能力
- 召唤过程行进方向遇到静止车辆
- 召唤过程行进方向遇到车辆驶出车位
- 召唤过程行进方向遇到行人缓行
- 召唤过程行进方向遇到有遮挡的儿童横穿
- 召唤过程行进方向遇到临时交通障碍物
- 室内停车场一键召唤测试方法
- 泊出能力
- 立柱车位单侧有静止车辆
- 立柱车位单侧有静止车辆且泊出过程中有静止直立儿童
- 墙面车位单侧有静止车辆
- 单层巡航能力
- 单层召唤过程行进方向遇到静止车辆
- 单层召唤过程行进方向遇到静止行人
- 单层召唤过程行进方向遇到临时交通障碍物
- 跨层巡航能力
- 跨层召唤过程遇到儿童
- 跨层召唤过程遇到锥桶
- 露天停车场一键泊车测试方法
- 泊入能力
- 水平划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆
- 垂直划线车位——两侧存在静止车辆且车位有直立儿童
- 垂直划线车位——两侧存在静止车辆且车位内存在锥桶
- 斜列划线车位——两侧存在静止车辆
- 巡航能力
- 车位搜寻过程中遇到车辆制动
- 车位搜寻过程遇到车辆驶出车位
- 车位搜寻过程遇到行人缓行
- 车位搜寻过程遇到有遮挡儿童横穿
- 车位搜寻过程遇到临时交通障碍物
- 搜寻目标车位存在锥桶,相邻车位空余
- 室内停车场一键泊车测试方法
- 泊入能力
- 立柱车位——单侧有静止车辆
- 立柱车位——单侧有静止车辆且车位内有平躺儿童
- 立柱车位——单侧有静止车辆且车位内有锥桶
- 墙面车位——单侧有静止车辆
- 单层巡航能力
- 单层车位搜寻过程遇到静止车辆
- 单层车位搜寻过程遇到静止行人
- 单层车位搜寻过程遇到临时交通障碍物
- 搜寻目标车位存在锥桶,相邻车位空余
- 跨层巡航能力
- 跨层车位搜寻过程遇到儿童
- 跨层车位搜寻过程遇到儿童锥桶
- 说明书审查
- 系统状态提示
- 驾驶员监控
- 风险处置测试方法
- 道路闭塞测试方法
- 摄像头失效测试方法
- 系统断电测试方法
评价方法
指标体系
| 记忆泊车指标体系 | |||
|---|---|---|---|
| 记忆泊车 | 一级指标 | 二级指标 | 三级指标 |
| 性能表现 | 一键召唤 | 露天停车场一键召唤 | |
| 室内停车场一键召唤 | |||
| 一键泊车 | 露天停车场一键泊车 | ||
| 室内停车场一键泊车 | |||
| 交互与风险控制 | 系统提示 | 说明书审查 | |
| 系统状态提示 | |||
| 驾驶员监控 | 状态监测 | ||
| 风险处置 | 道路闭塞 | ||
| 摄像头失效 | |||
| 系统断电 | |||
指标权重分配
| 记忆泊车指标权重分配 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 一级指标 | 一级指标权重 | 二级指标 | 二级指标权重 | 三级指标 | 三级指标权重 | 四级指标 | 四级指标权重 | 五级指标 | 五级指标权重 |
| 性能表现 | 70% | 一键召唤 | 50% | 露天停车场一键召唤 | 50% | 泊出能力 | 50% | 水平划线车位——两侧存在静止车辆 | 20% |
| 水平划线车位——两侧存在静止车辆且车位附近有静止直立儿童 | 20% | ||||||||
| 垂直划线车位——两侧存在静止车辆 | 20% | ||||||||
| 垂直划线车位——两侧存在静止车辆且车位附近有静止直立儿童 | 20% | ||||||||
| 斜列划线车位——两侧存在静止车辆 | 20% | ||||||||
| 巡航能力 | 50% | 召唤过程行进方向遇到静止车辆 | 20% | ||||||
| 召唤过程行进方向遇到车辆驶出车位 | 20% | ||||||||
| 召唤过程行进方向遇到行人缓行 | 20% | ||||||||
| 召唤过程行进方向遇到有遮挡的儿童横穿 | 20% | ||||||||
| 召唤过程行进方向遇到临时交通障碍物 | 20% | ||||||||
| 室内停车场一键召唤 | 50% | 泊出能力 | 50% | 立柱车位单侧有静止车辆 | 30% | ||||
| 立柱车位单侧有静止车辆且泊出过程中有静止直立儿童 | 40% | ||||||||
| 墙面车位单侧有静止车辆 | 30% | ||||||||
| 单层巡航能力 | 30% | 单层召唤过程行进方向遇到静止车辆 | 30% | ||||||
| 单层召唤过程行进方向遇到静止行人 | 40% | ||||||||
| 单层召唤过程行进方向遇到临时交通障碍物 | 30% | ||||||||
| 多层巡航能力 | 20% | 跨层召唤过程遇到儿童 | 50% | ||||||
| 跨层召唤过程遇到锥桶 | 20% | ||||||||
| 一键泊入 | 50% | 露天停车场一键泊入 | 50% | 泊入能力 | 50% | 水平划线车位——两侧存在静止车辆 | 20% | ||
| 垂直划线车位——两侧存在静止车辆 | 20% | ||||||||
| 垂直划线车位——两侧存在静止车辆且车位有直立儿童 | 20% | ||||||||
| 垂直划线车位——两侧存在静止车辆且车位内存在锥桶 | 20% | ||||||||
| 斜列划线车位——两侧存在静止车辆 | 20% | ||||||||
| 巡航能力 | 50% | 车位搜寻过程中遇到车辆制动 | 15% | ||||||
| 车位搜寻过程遇到车辆驶出车位 | 15% | ||||||||
| 车位搜寻过程遇到行人缓行 | 15% | ||||||||
| 车位搜寻过程遇到有遮挡儿童横穿 | 20% | ||||||||
| 车位搜寻过程遇到临时交通障碍物 | 15% | ||||||||
| 搜寻目标车位存在锥桶,相邻车位空余 | 20% | ||||||||
| 室内停车场一键泊入 | 50% | 泊入能力 | 50% | 立柱车位——单侧有静止车辆 | 25% | ||||
| 立柱车位——单侧有静止车辆且车位内有平躺儿童 | 25% | ||||||||
| 立柱车位——单侧有静止车辆且车位内有锥桶 | 25% | ||||||||
| 墙面车位——单侧有静止车辆 | 25% | ||||||||
| 单层巡航能力 | 30% | 单层车位搜寻过程遇到静止车辆 | 25% | ||||||
| 单层车位搜寻过程遇到静止行人 | 25% | ||||||||
| 单层车位搜寻过程遇到临时交通障碍物 | 25% | ||||||||
| 搜寻目标车位存在锥桶,相邻车位空余 | 25% | ||||||||
| 跨层巡航能力 | 20% | 跨层车位搜寻过程遇到儿童 | 50% | ||||||
| 跨层车位搜寻过程遇到儿童锥桶 | 50% | ||||||||
| 交互和风险控制 | 30% | 系统提示 | 20% | 说明书审查 | 50% | 系统定义 | 25% | / | / |
| 驾驶员责任描述 | 25% | / | / | ||||||
| 系统使用条件描述 | 25% | / | / | ||||||
| 驾驶员状态监测描述 | 25% | / | / | ||||||
| 系统状态提示 | 50% | 系统的开启、关闭、激活状态 | 100% | / | / | ||||
| 驾驶员监控 | 40% | 驾驶员状态监测 | 100% | 驾驶员低头 | 50% | / | / | ||
| 驾驶员闭眼 | 50% | / | / | ||||||
| 风险处置 | 40% | 道路闭塞 | 30% | 记忆泊车系统运行路线上道路封闭 | 100% | / | / | ||
| 摄像头失效 | 40% | 记忆泊车系统运行过程中摄像头失效 | 100% | / | / | ||||
| 系统断电 | 40% | 记忆泊车系统运行过程中供电中断 | 100% | / | / | ||||
算分方法
记忆泊车的总分根据一级指标得分及权重计算得出,保留小数点后一位,计算方式如下:
 、
、
式中,
S —— 记忆泊车的评价总分
i —— 下级指标
Si —— 下一级指标的得分情况
ai —— 下一级指标的权重情况
A —— 可实现记忆泊车的距离范围权重。若记忆泊车系统运行距离≤150m,权重A=60%;若距离属于150m~300m(包含300m),权重A=80%;若距离>300m,则权重A=100%。
指标得分计算方法
露天停车场一键召唤得分情况说明
泊出能力得分情况说明
水平划线车位——两侧存在静止车辆
1. 测试车辆成功泊出车位,得100分;
2. 测试车辆与边界车辆发生碰撞、无法开启召唤功能或系统请求接管,得0分。
水平划线车位——两侧存在静止车辆且车位附近有静止直立儿童
测试车辆在未发生碰撞的前提下,泊出车位或提示驾驶员环境异常需要接管,得100分。
垂直划线车位——两侧存在静止车辆
1. 测试车辆成功泊出车位,得100分;
2. 测试车辆与边界车辆发生碰撞、无法开启召唤功能或系统请求接管,得0分。
垂直划线车位——两侧存在静止车辆且车位附近有静止直立儿童
在露天停车场垂直车位播出过程中无障碍物测试场景得分条件下,无法启动记忆泊车或提示驾驶员环境异常无法泊出,得100分。
斜列划线车位——两侧存在静止车辆
1. 测试车辆成功泊出车位,得100分;
2. 测试车辆与边界车辆发生碰撞、无法开启召唤功能或系统请求接管,得0分。
巡航能力得分情况说明
召唤过程行进方向遇到静止车辆
1. 测试车辆抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停在静止障碍车辆周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
召唤过程行进方向遇到车辆驶出车位
1. 测试车辆抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停止行车路径上,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
召唤过程行进方向遇到行人缓行
1. 测试车辆通过绕行方式抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆跟随行人行驶并抵达召唤位置,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
召唤过程行进方向遇到有遮挡的儿童横穿
1. 测试车辆抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停止行车路径上,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
召唤过程行进方向遇到临时交通障碍物
1. 测试车辆通过绕行方式抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停靠在临时交通障碍物附近,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
室内停车场一键召唤得分情况说明
泊出能力得分情况说明
立柱车位单侧有静止车辆
1. 测试车辆成功泊出车位,得100分;
2. 测试车辆与边界车辆、立柱发生碰撞、无法开启召唤功能或系统请求接管,得0分。
立柱车位单侧有静止车辆且泊出过程中有静止直立儿童
在室内停车场立柱车位播出过程无障碍物测试场景得分条件下,无法启动泊出功能或提示驾驶员环境异常无法泊出,得100分。
墙面车位单侧有静止车辆
1. 测试车辆成功泊出车位,得100分;
2. 测试车辆与边界车辆、墙面发生碰撞、无法开启召唤功能或系统请求接管,得0分。
单层巡航能力得分情况说明
单层召唤过程行进方向遇到静止车辆
1. 测试车辆抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停在静止障碍车辆周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
单层召唤过程行进方向遇到静止行人
1. 测试车辆通过绕行方式抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停在静止行人周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
单层召唤过程行进方向遇到临时交通障碍物
1. 测试车辆通过绕行方式抵达召唤位置,安全得100分,效率得100分;
2. 测试车辆停在临时交通障碍物周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
跨层巡航能力得分情况说明
跨层召唤过程遇到儿童
1. 测试车辆停在静止儿童周边,安全得100分;
2. 测试车辆发生碰撞,安全得0分。
跨层召唤过程遇到锥桶
1. 测试车辆停在锥桶周边,安全得100分;
2. 测试车辆发生碰撞,安全得0分。
露天停车场一键泊车得分说明
泊入能力
水平划线车位——两侧存在静止车辆
1. 泊车过程未与周边障碍物碰撞且成功泊入车位,按下表得分计算
| 露天停车场水平车位两侧存在静止车辆泊车得分说明 | |||
|---|---|---|---|
| 评价方法 | 项目分值 | ||
| 揉库次数 | 揉库次数≤4 | 25 | |
| 4<揉库次数≤6 | 20 | ||
| 6<揉库次数≤9 | 15 | ||
| 揉库次数>9 | 0 | ||
| 停车位姿 | -1°≤倾斜角度≤1° | 25 | |
| 1°<|倾斜角度|≤2° | 20 | ||
| 2°<|倾斜角度|≤3° | 15 | ||
| |倾斜角度|>3° | 0 | ||
| 停车位置 | 横向控制评价 | 前后轮与车位线的距离0.05m~0.3m | 25 |
| 纵向控制评价 | 前后端最近点与车位线的距离差值≥0.1m | 25 | |
2. 测试车辆与边界车辆发生碰撞、无法开启泊车功能或系统请求接管,得0分。
垂直划线车位——两侧存在静止车辆
1. 泊车过程未与周边障碍物碰撞且成功泊入车位,按下表得分计算
| 露天停车场垂直车位两侧存在静止车辆泊车得分说明 | |||
|---|---|---|---|
| 评价方法 | 项目分值 | ||
| 揉库次数 | 揉库次数≤4 | 25 | |
| 4<揉库次数≤6 | 20 | ||
| 6<揉库次数≤9 | 15 | ||
| 揉库次数>9 | 0 | ||
| 停车位姿 | -1°≤倾斜角度≤1° | 25 | |
| 1°<|倾斜角度|≤2° | 20 | ||
| 2°<|倾斜角度|≤3° | 15 | ||
| |倾斜角度|>3° | 0 | ||
| 停车位置 | 横向控制评价 | 前轴中心左右两侧与车位线的距离差值≥0.1m | 25 |
| 纵向控制评价 | 前后端最近点与车位线的距离差值≥0.1m | 25 | |
2. 测试车辆与边界车辆发生碰撞、无法开启泊车功能或系统请求接管,得0分。
垂直划线车位——两侧存在静止车辆且车位有直立儿童
未发生碰撞,得100分。
垂直划线车位——两侧存在静止车辆且车位内存在锥桶
未发生碰撞,得100分。
斜列划线车位——两侧存在静止车辆
1. 泊车过程未与周边障碍物碰撞且成功泊入车位,按下表得分计算
| 露天停车场斜列车位两侧存在静止车辆泊车得分说明 | |||
|---|---|---|---|
| 评价方法 | 项目分值 | ||
| 揉库次数 | 揉库次数≤2 | 25 | |
| 2<揉库次数≤4 | 20 | ||
| 4<揉库次数≤7 | 15 | ||
| 揉库次数>7 | 0 | ||
| 停车位姿 | -1°≤倾斜角度≤1° | 25 | |
| 1°<|倾斜角度|≤2° | 20 | ||
| 2°<|倾斜角度|≤3° | 15 | ||
| |倾斜角度|>3° | 0 | ||
| 停车位置 | 横向控制评价 | 前轴中心左右两侧与车位线的距离差值≥0.1m | 25 |
| 纵向控制评价 | 前后端最近点与车位线的距离差值≥0.1m | 25 | |
2. 测试车辆与边界车辆发生碰撞、无法开启泊车功能或系统请求接管,得0分。
巡航能力
车位搜寻过程中遇到车辆制动
1. 测试车辆成功泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在障碍车辆周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
车位搜寻过程遇到车辆驶出车位
1. 测试车辆成功泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在行车路径上,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
车位搜寻过程遇到行人缓行
1. 测试车辆通过绕行方式成功泊入目标车位,安全得100分,效率得100分;
2. 测试车辆跟随行人行驶并成功泊入目标车位,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
车位搜寻过程遇到有遮挡儿童横穿
1. 测试车辆成功泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在行车路径上,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
车位搜寻过程遇到临时交通障碍物
1. 测试车辆通过绕行方式成功泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在临时交通障碍物附近,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
搜寻目标车位存在锥桶,相邻车位空余
1. 测试车辆成功泊入相邻车位,安全得100分,效率得100分;
2. 测试车辆停在锥桶附近,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
室内停车场一键泊车得分说明
泊入能力
立柱车位——单侧有静止车辆
1. 泊车过程未与周边障碍物碰撞且成功泊入车位,按下表得分计算
| 室内停车场立柱车位内无障碍物场景泊车得分说明 | |||
|---|---|---|---|
| 评价方法 | 项目分值 | ||
| 揉库次数 | 揉库次数≤4 | 25 | |
| 4<揉库次数≤6 | 20 | ||
| 6<揉库次数≤9 | 15 | ||
| 揉库次数>9 | 0 | ||
| 停车位姿 | -1°≤倾斜角度≤1° | 25 | |
| 1°<|倾斜角度|≤2° | 20 | ||
| 2°<|倾斜角度|≤3° | 15 | ||
| |倾斜角度|>3° | 0 | ||
| 停车位置 | 横向控制评价 | 前轴中心左右两侧与车位线的距离差值≥0.1m | 25 |
| 纵向控制评价 | 前后端最近点与车位线的距离差值≥0.1m | 25 | |
2. 测试车辆与边界车辆发生碰撞、无法开启泊车功能或系统请求接管,得0分。
立柱车位——单侧有静止车辆且车位内有平躺儿童
未发生碰撞,得100分。
立柱车位——单侧有静止车辆且车位内有锥桶
未发生碰撞,得100分。
墙面车位——单侧有静止车辆
1. 泊车过程未与周边障碍物碰撞且成功泊入车位,按下表得分计算
| 室内停车场墙面车位内无障碍物场景泊车得分说明 | |||
|---|---|---|---|
| 评价方法 | 项目分值 | ||
| 揉库次数 | 揉库次数≤4 | 25 | |
| 4<揉库次数≤6 | 20 | ||
| 6<揉库次数≤9 | 15 | ||
| 揉库次数>9 | 0 | ||
| 停车位姿 | -1°≤倾斜角度≤1° | 25 | |
| 1°<|倾斜角度|≤2° | 20 | ||
| 2°<|倾斜角度|≤3° | 15 | ||
| |倾斜角度|>3° | 0 | ||
| 停车位置 | 横向控制评价 | 前轴中心左右两侧与车位线的距离差值≥0.1m | 25 |
| 纵向控制评价 | 前后端最近点与车位线的距离差值≥0.1m | 25 | |
2. 测试车辆与边界车辆发生碰撞、无法开启泊车功能或系统请求接管,得0分。
单层巡航能力
单层车位搜寻过程遇到静止车辆
1. 测试车辆泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在障碍车辆周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
单层车位搜寻过程遇到静止行人
1. 测试车辆通过绕行方式泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在静止行人周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
单层车位搜寻过程遇到临时交通障碍物
1. 测试车辆通过绕行方式泊入目标车位,安全得100分,效率得100分;
2. 测试车辆停在临时交通障碍物周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
搜寻目标车位存在锥桶,相邻车位空余
1. 测试车辆泊入相邻车位,安全得100分,效率得100分;
2. 测试车辆停在锥桶周边,安全得100分,效率得0分;
3. 测试车辆发生碰撞,安全得0分,效率得0分。
跨层巡航能力
跨层车位搜寻过程遇到儿童
1. 测试车辆停在儿童周边,安全得100分;
3. 测试车辆发生碰撞,安全得0分。
跨层车位搜寻过程遇到儿童锥桶
1. 测试车辆停在锥桶周边,安全得100分;
3. 测试车辆发生碰撞,安全得0分。
说明书审查得分说明
审核试验车辆得用户手册内容:
1. 系统功能描述 —— 应能明确表明该系统为智能辅助驾驶系统,且明确说明该系统的功能,得100分;
2. 驾驶呀u责任描述 —— 应明确说明驾驶员承担一切责任,得100分;
3. 使用条件描述 —— 应能说明系统的使用条件,至少包含使用区域、车位线要求,得100分;
4. 驾驶员状态监测描述 —— 应对能引起驾驶员监控能力系统报警的行为进行说明及相应的报警形式,得100分。
系统状态提示得分说明
在车辆启动后,应能明确表明该系统的开启、关闭和激活状态,得100分。
驾驶员状态监测得分说明
驾驶员低头
当驾驶员低头后,应在5s内发出语音报警,或者声音报警(需伴随视觉或触觉信号),得100分。
驾驶员闭眼
当驾驶员闭眼后,应在4s内发出语音报警,或者声音报警(需伴随视觉或触觉信号),得100分。
风险处置得分说明
道路闭塞
在记忆泊车系统运行过程中,前方道路临时封闭,记忆泊车系统使试验车辆泊入就近空车位或停在行车路径上通知驾驶员接管,得100分。
摄像头失效
在车道内行驶时遮挡摄像头,记忆泊车系统使试验车辆泊入就近空车位或停在行车路径上并通知驾驶员接管,得40分;
在泊入车位时遮挡摄像头,记忆泊车系统仍使试验车辆泊入车位或停车并通知驾驶员接管,得30分;
在泊出车位时遮挡摄像头,记忆泊车系统仍使试验车辆泊出车位或停车并通知驾驶员接管,得30分;
系统断电
在车道内行驶时进行摄像头断电,记忆泊车系统使试验车辆泊入就近空车位或停在行车路径上并通知驾驶员接管,得40分;
在泊入车位时进行摄像头断电,记忆泊车系统仍使试验车辆泊入车位或停车并通知驾驶员接管,得30分;
在泊出车位时进行摄像头断电,记忆泊车系统仍使试验车辆泊出车位或停车并通知驾驶员接管,得30分;
试验项目
露天停车场一键召唤测试方法
泊出能力
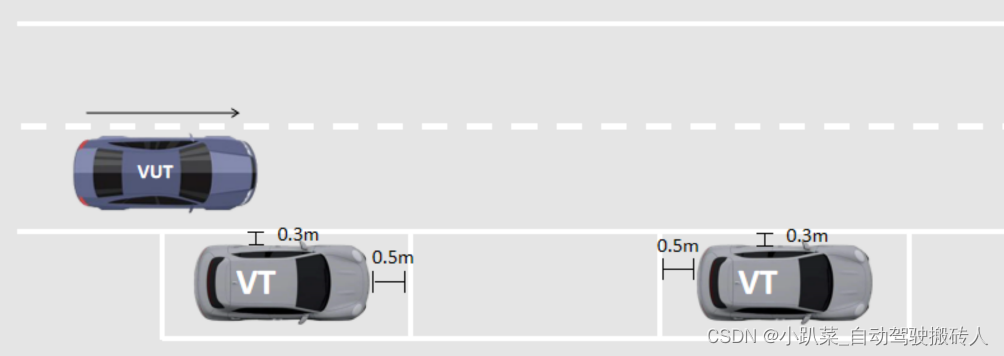
水平划线车位——两侧存在静止车辆
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标平行车位,试验车辆停放两侧存在静止车辆,静止车辆摆放位置如下图所示。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
水平划线车位——两侧存在静止车辆且车位附近有静止直立儿童
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标平行车位,试验车辆停放两侧存在静止车辆和儿童假人,静止车辆和儿童假人摆放位置如下图所示。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆、儿童发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
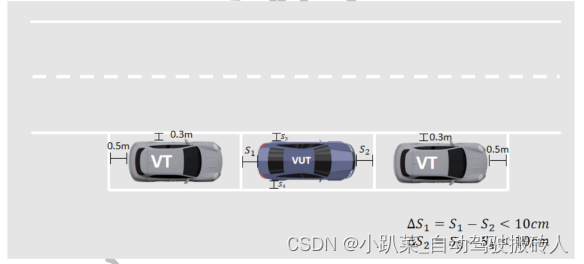
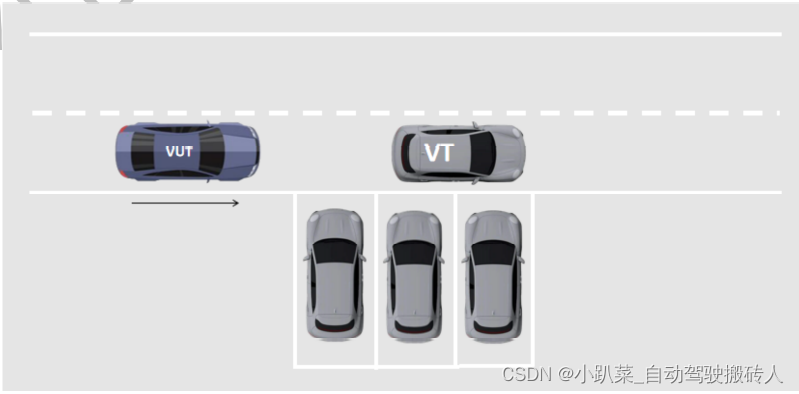
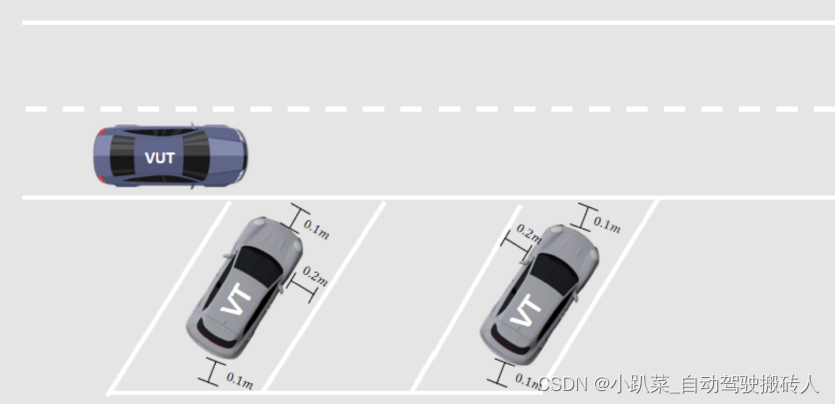
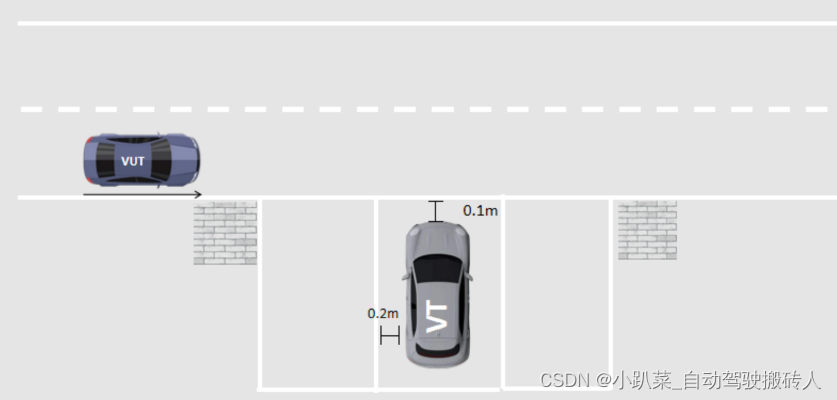
垂直划线车位——两侧存在静止车辆
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标垂直车位,试验车辆停放两侧存在静止车辆,静止车辆摆放位置如下图所示。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
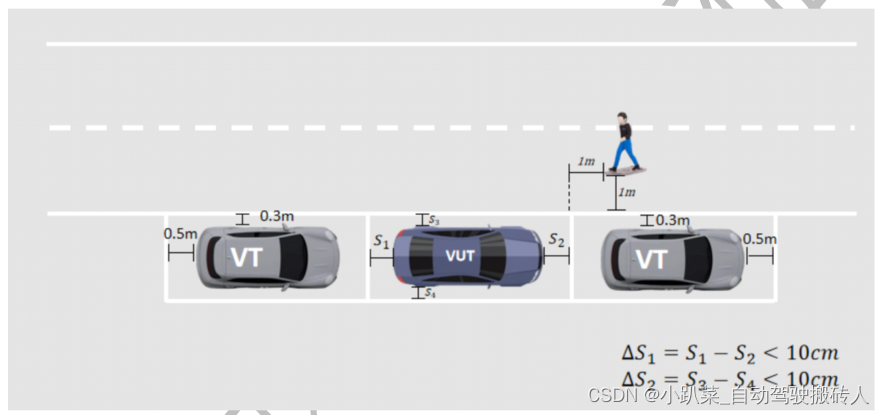
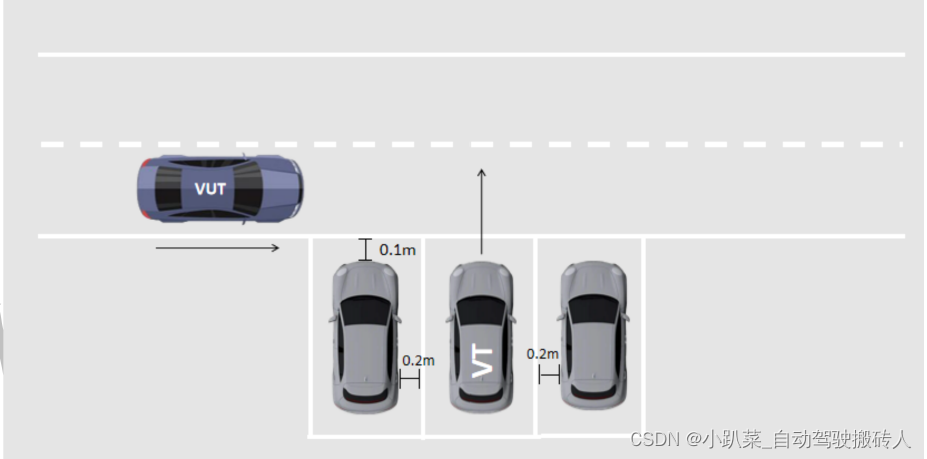
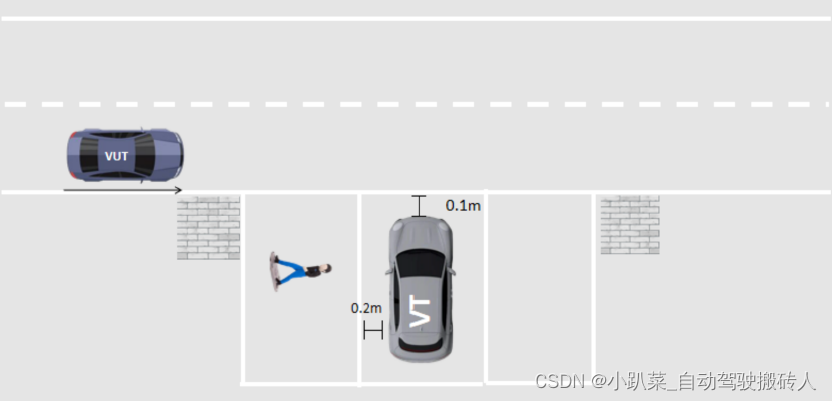
垂直划线车位——两侧存在静止车辆且车位附近有静止直立儿童
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标垂直车位,试验车辆停放两侧存在静止车辆和儿童假人,静止车辆和儿童假人摆放位置如下图所示。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆、儿童假人发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
斜列划线车位——两侧存在静止车辆
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标斜列车位,试验车辆停放两侧存在静止车辆,静止车辆摆放位置如下图所示。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
巡航能力
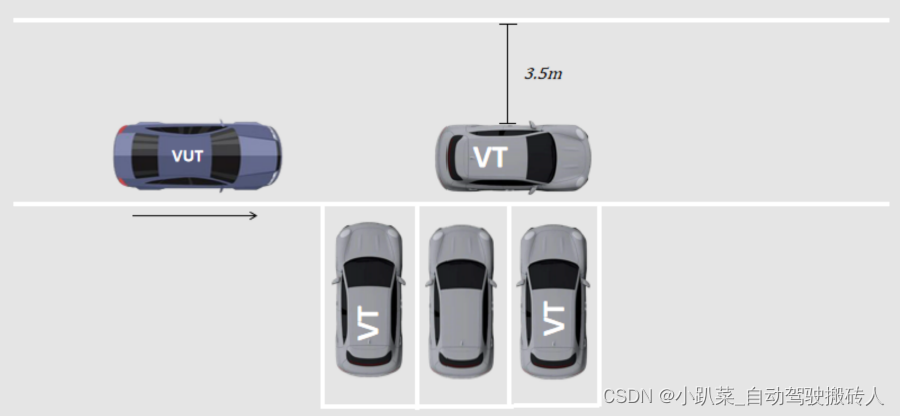
召唤过程行进方向遇到静止车辆
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含两条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。在试验车辆直线行驶路径前方设置一静止障碍车辆,障碍车辆停放在车道中间,停车位上车辆非强制要求。如下图所示。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出,在召车过程直线段遇到静止障碍车。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
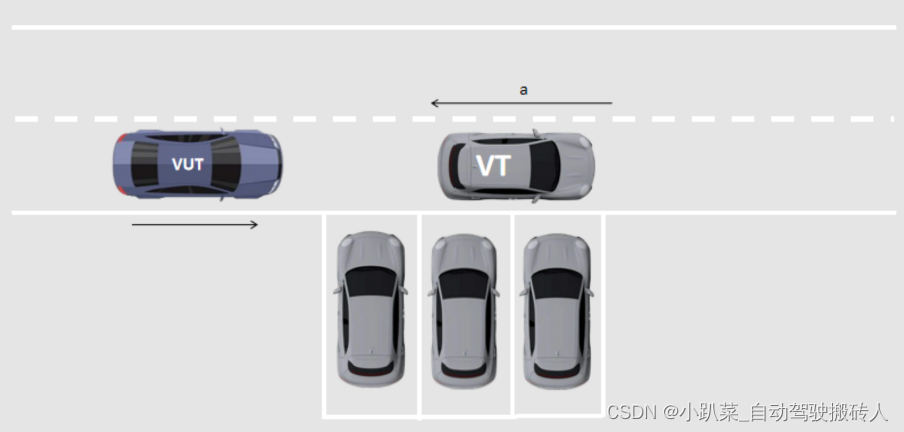
召唤过程行进方向遇到车辆驶出车位
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含两条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),车道右侧有垂直停车位。试验车辆在车道内行驶,目标车辆从车位驶出,遮挡车辆前端与道路边缘距0.1m,目标车辆前端与遮挡车辆对齐且距车位两侧距离相等。如下图所示。
测试方法
1. 驾驶员开启试验车辆记忆泊车系统,沿泊车路径行驶。
2. 目标车辆由静止经1s加速至5km/h后,以5m/h的速度匀速驶过测试车到,预计碰撞位置位目标车辆前端与试验车辆前端中点对齐。如下图所示。

退出条件
1. 车辆未泊出车位或与其他车辆或障碍物发生碰撞;
2. 或者记忆泊车系统发出异常提示;
3. 或者试验车辆到达召车位置;
4. 或者试验车辆退出泊车系统。
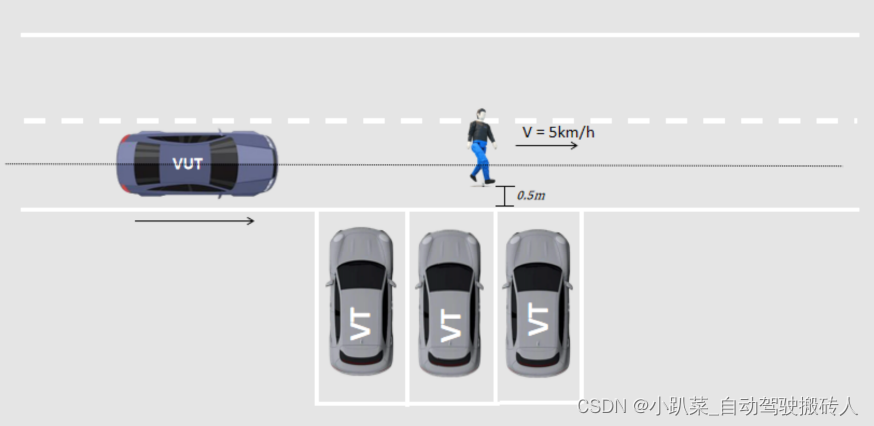
召唤过程行进方向遇到行人缓行
测试场景:
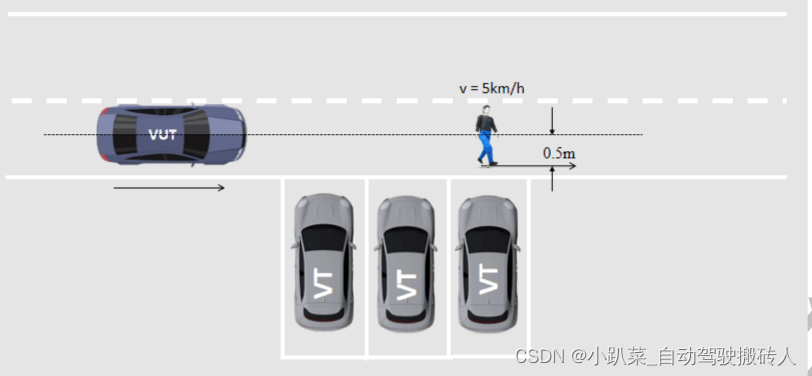
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含两条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。试验车辆在车道内行驶,目标行人位于车道中间靠右0.5m处,行驶方向与车辆行进方向相同,停车位上的车辆非强制要求。如下图所示。
测试方法
1. 驾驶员开启试验车辆记忆泊车系统,沿泊车路径行驶。
2. 试验车辆直线行驶路径前方设置车辆行进方向行走的假人,试验车辆距离假人至少THW=5s处时,成年假人经1s加速至5km/h并保持匀速运动,假人轨迹位于道路中间偏右0.5m处。
退出条件
1. 车辆未泊出车位或与其他车辆或障碍物发生碰撞;
2. 或者记忆泊车系统发出异常提示;
3. 或者试验车辆到达召车位置;
召唤过程行进方向遇到有遮挡的儿童横穿
测试场景:
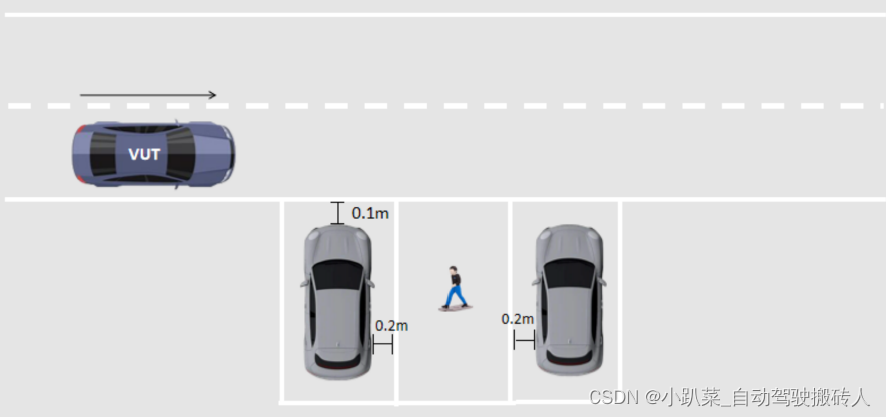
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含两条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),车道右侧有垂直停车位。试验车辆在车道内行驶,目标儿童假人在两车位中间位置处横穿出现,至少在儿童假人左侧停放遮挡车辆。遮挡车辆前端与道路边缘剑哥0.1m,目标儿童距离道路边缘2m。如下图所示。

测试方法
1. 驾驶员开启试验车辆记忆泊车系统,沿泊车路径行驶。
2. 目标儿童假人经1s加速至5km/h并保持5km/h速度匀速穿过测试车道,预计碰撞位置在车辆正前方50%处。
退出条件
1. 车辆未泊出车位或与其他车辆或障碍物发生碰撞;
2. 或者记忆泊车系统发出异常提示;
3. 或者试验车辆到达召车位置;
4. 或者试验车辆退出泊车系统。
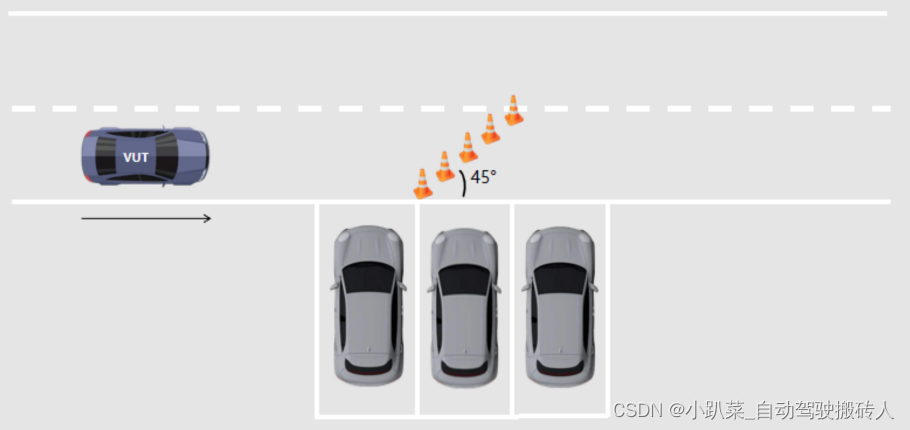
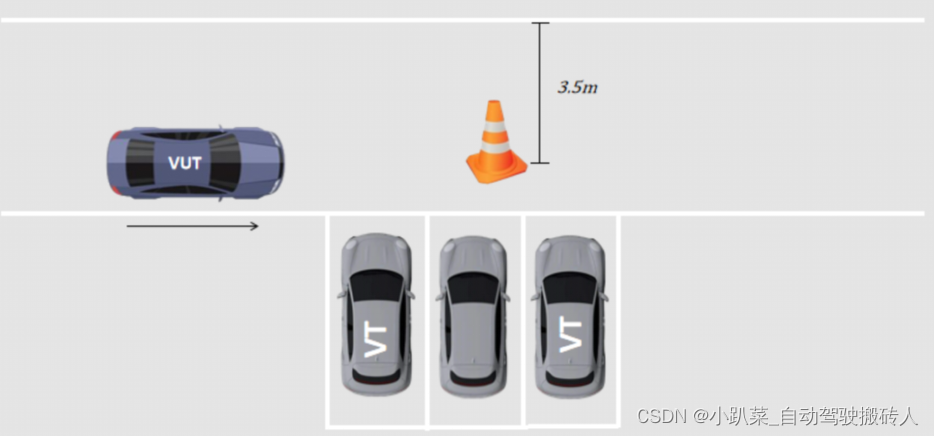
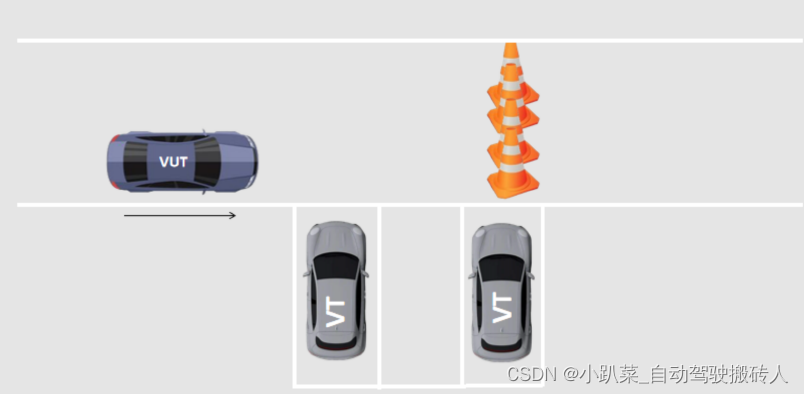
召唤过程行进方向遇到临时交通障碍物
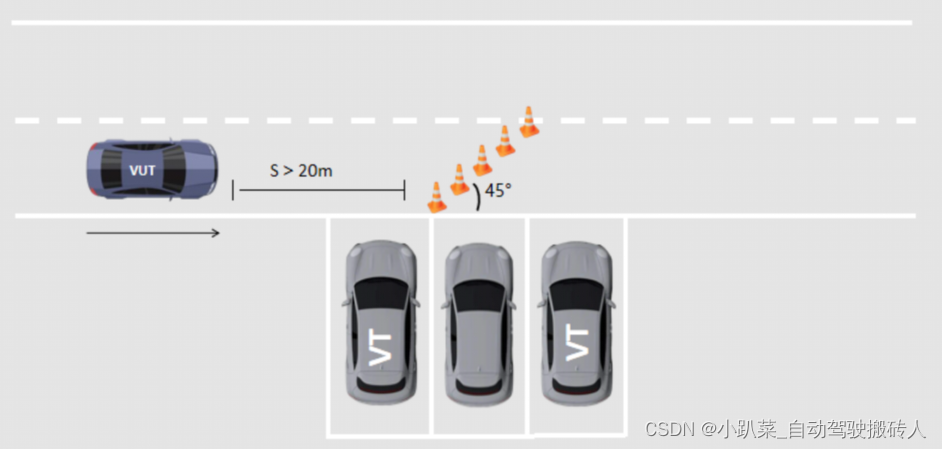
测试场景:
测试选择能开启记忆泊车功能的户外封闭场地的停车区域进行,测试道路至少包含两条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。在车道中间放置倾斜与道路方向45°夹角的5哥锥形交通路标(推荐尺寸:50cm*35cm)作为障碍物,如下图所示。
测试方法
1. 驾驶员开启试验车辆记忆泊车系统,沿泊车路径行驶。
2. 试验车辆至少距锥桶前方20m达到稳定车速。
退出条件
1. 车辆未泊出车位或与其他车辆或障碍物发生碰撞;
2. 或者记忆泊车系统发出异常提示;
3. 或者试验车辆到达召车位置。
室内停车场一键召唤测试方法
泊出能力
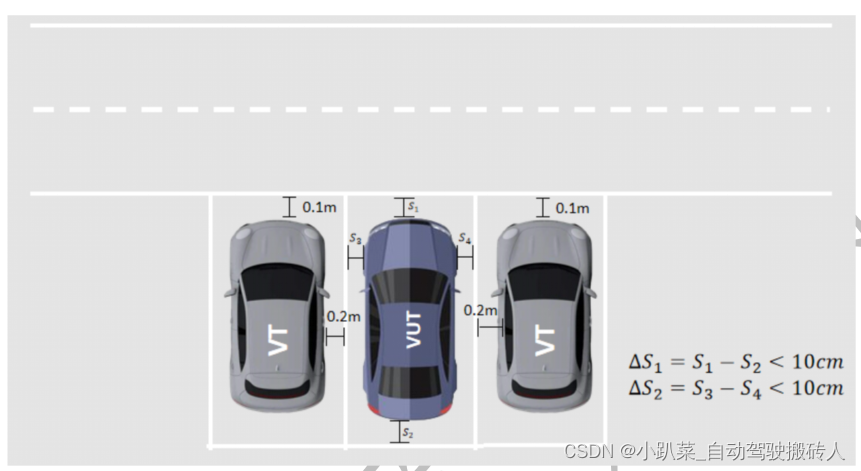
立柱车位单侧有静止车辆
测试场景:
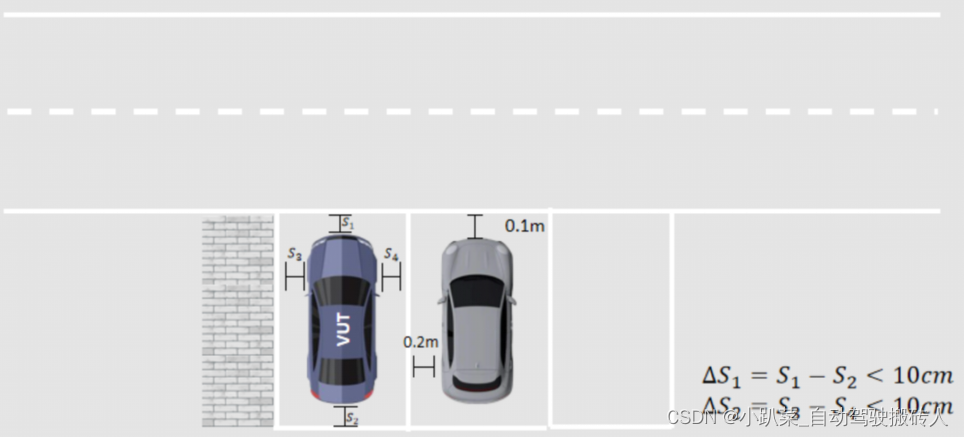
测试室内停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标立柱车位,试验车辆停放车位一侧存在静止车辆,另一侧存在立柱。以左侧立柱车位示例,静止车辆摆放如下图。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
随机选择左侧或右侧立柱车位,驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆、立柱发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
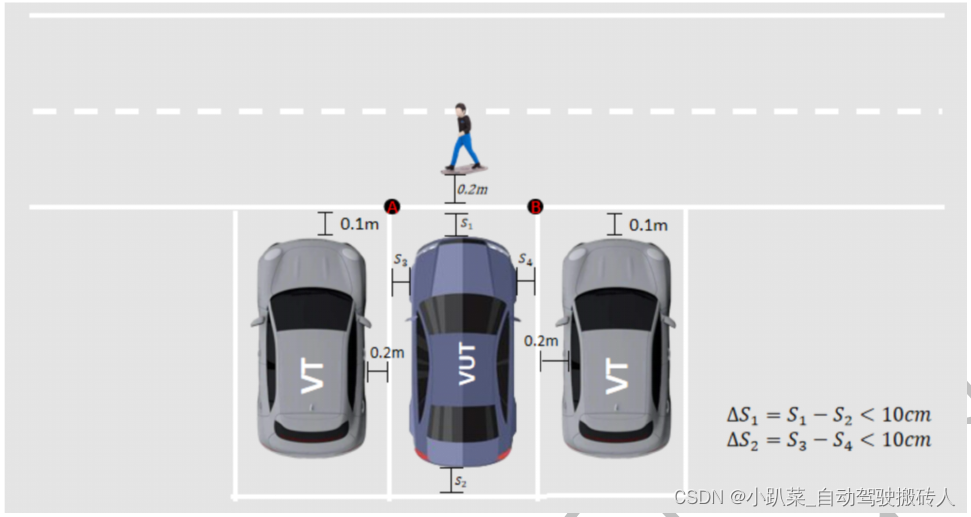
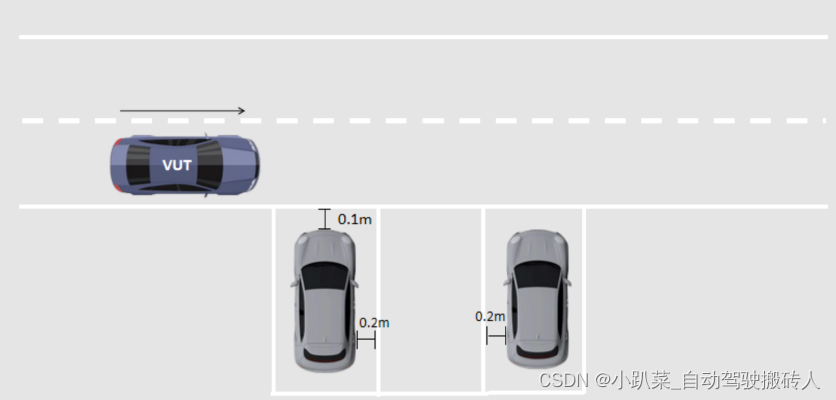
立柱车位单侧有静止车辆且泊出过程中有静止直立儿童
测试场景:
测试室内停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标立柱车位,试验车辆停放车位一侧存在静止车辆,另一侧存在立柱。以左侧立柱车位示例,静止车辆摆放如下图。儿童假人位于AB两点的中垂线上且距车位线0.2m。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
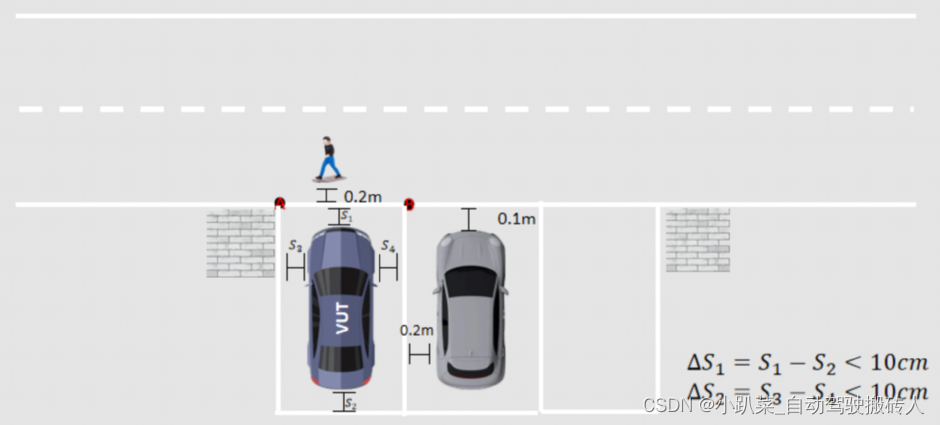
测试方法
随机选择左侧或右侧立柱车位,驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆、立柱、儿童假人发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
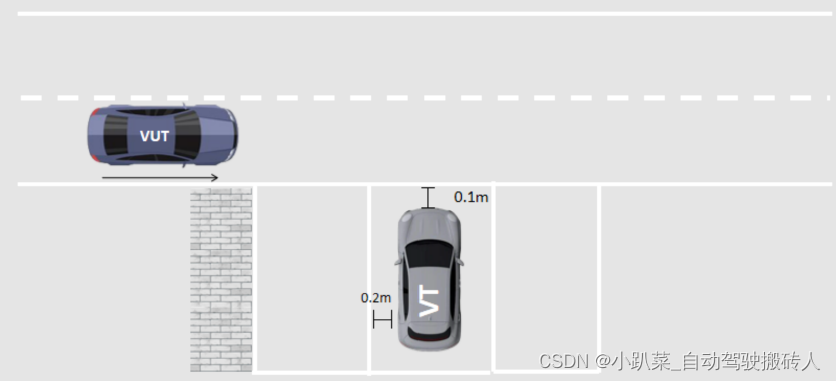
墙面车位单侧有静止车辆
测试场景:
测试室内停车区域进行,测试道路至少包含一条直道且直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外),道路一侧有目标墙面车位,试验车辆停放车位一侧存在静止车辆,另一侧存在立柱。以左侧立柱车位示例,静止车辆摆放如下图。儿童假人位于AB两点的中垂线上且距车位线0.2m。试验车如能依靠记忆泊车系统完成泊入,则试验车辆初始位置由记忆泊车系统泊入功能确定。否则试验车辆应摆放在车位中央。车身左右侧(以轮胎接地点计算)距离车位线内沿差值小于10cm,车身前后侧距车位线内沿差值小于10cm。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他边界车辆、墙面发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆泊出车位。
单层巡航能力
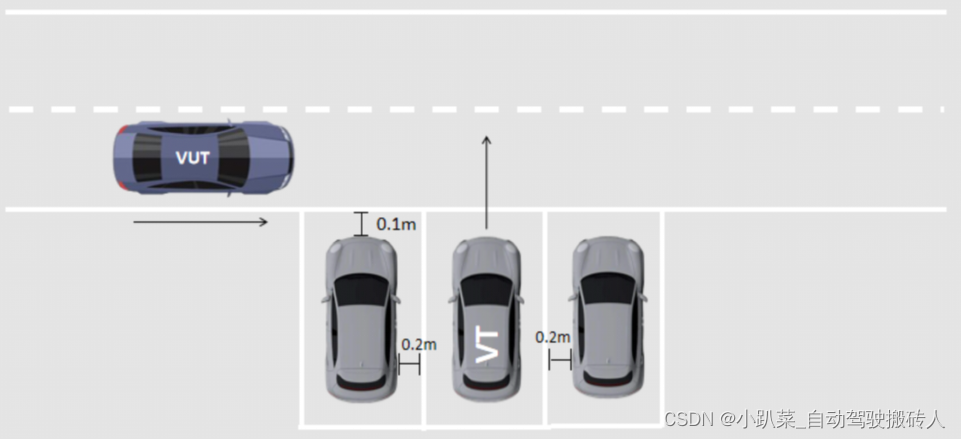
单层召唤过程行进方向遇到静止车辆
测试场景:
测试室内停车区域进行,测试道路直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。在试验车辆直线行驶路径前方设置一静止障碍车辆,障碍车辆停放位置如下图所示。停车位上车辆非强制要求。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出,在召车过程直线段遇到静止障碍车辆。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆停靠在目标车后;
4. 或者试验车辆抵达召车位置。
单层召唤过程行进方向遇到静止行人
测试场景:
测试室内停车区域进行,测试道路直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。在试验车辆直线行驶路径前方设置一静止行人模型,行人模型停放位置如下图所示。停车位上车辆非强制要求。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出,在召车过程直线段遇到静止行人。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆抵达召车位置。
单层召唤过程行进方向遇到临时交通障碍物
测试场景:
测试室内停车区域进行,测试道路直道上无影响记忆泊车系统工作的障碍物(测试障碍物除外)。障碍锥桶(推荐尺寸:50cm*35cm)放置位置如下图所示。停车位上车辆非强制要求。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出,在召车过程直线段设置障碍物锥桶。
退出条件
1. 车辆未泊出车位或与其他边界车辆发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆抵达召车位置。
跨层巡航能力
跨层召唤过程遇到儿童
测试场景:
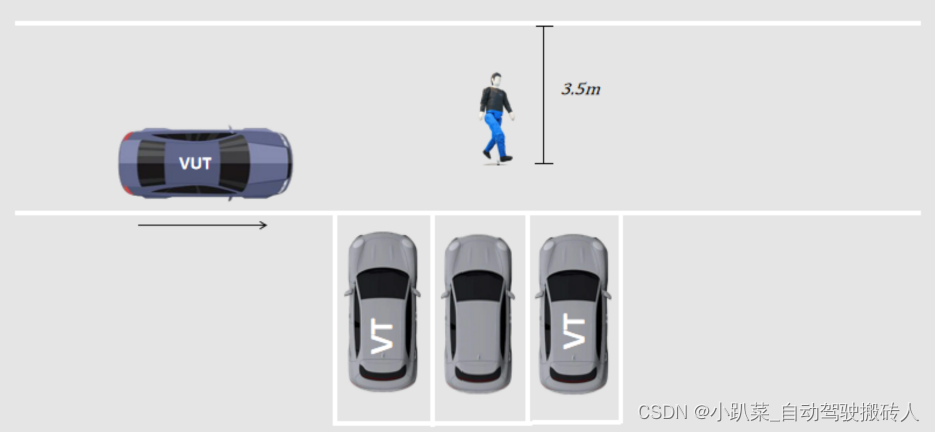
测试室内停车区域进行,在停车楼跨层通车道附近摆放静止直立儿童假人,儿童假人摆放在车道中间且距通车道一侧3m,如下图所示。车辆向低层方向行进,召唤位置和停车位置在空间上至少重合。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他车辆、墙壁发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆抵达召车位置或者停在儿童假人周边。
跨层召唤过程遇到锥桶
测试场景:
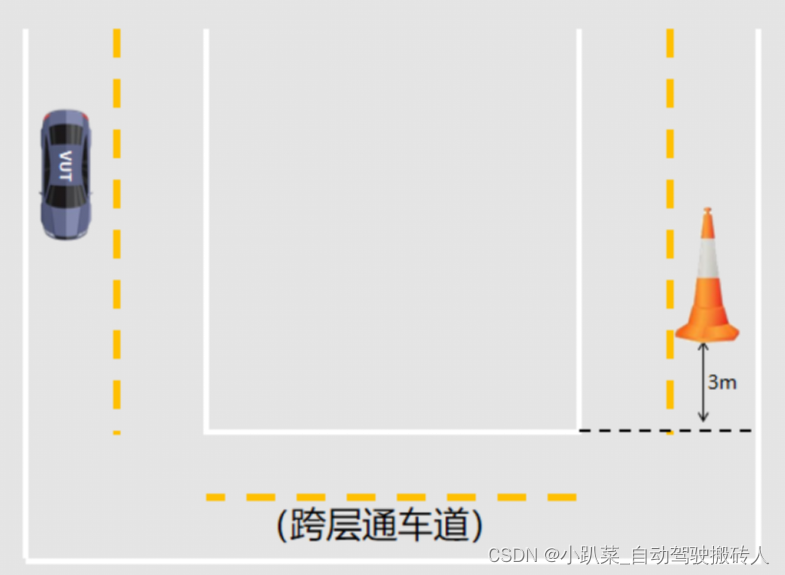
测试室内停车区域进行,在停车楼跨层通车道附近摆放静止锥桶,锥桶摆放在车道中间且距通车道一侧3m,如下图所示。车辆向低层方向行进,召唤位置和停车位置在空间上至少重合。
测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆泊出。
退出条件
1. 车辆未泊出车位或与其他车辆、墙壁发生碰撞;
2. 或者在泊出完成提示前系统发出接管请求;
3. 或者试验车辆抵达召车位置或者停在锥桶周边。
露天停车场一键泊车测试方法
泊入能力
水平划线车位——两侧存在静止车辆
测试场景:
测试场景如下图所示。
测试方法
1. 驾驶员开启试验车辆记忆泊车系统,测试车辆泊入;
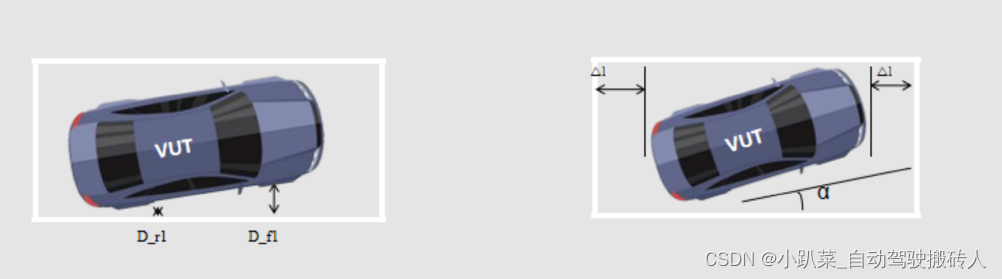
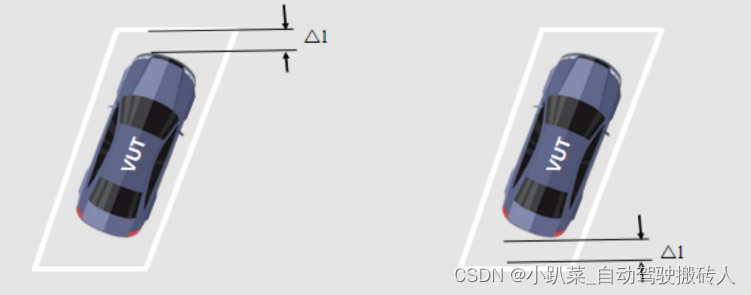
2. 试验完成后,记录揉库次数、车辆前后轮外侧接地点与车位边界线内侧的最小距离D_r1/D_f1、车辆最前端与最后端距离车位边界线内侧边缘的最小距离Δl。
退出条件
1. 车辆未搜索到车位;
2. 或者车辆未泊入车位;
3. 或者车辆与障碍物发生碰撞;
4. 或者在泊入完成前系统发出接管请求。
垂直划线车位——两侧存在静止车辆
测试场景:
测试场景如下图所示。

测试方法
1. 驾驶员开启试验车辆记忆泊车系统,测试车辆泊入;
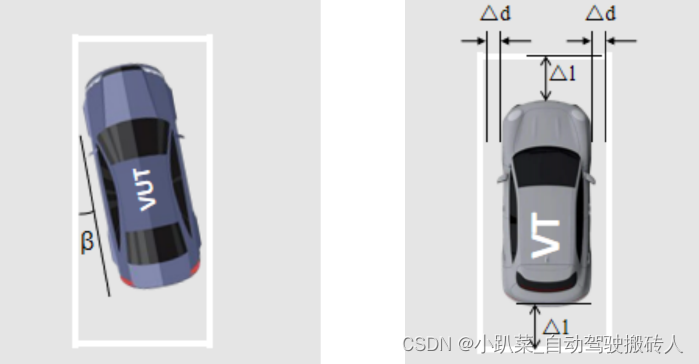
2. 试验完成后,记录揉库次数、车辆前后轮外侧接地点与车位边界线内侧的最小距离Δd、车辆最前端与最后端距离车位边界线内侧边缘的最小距离Δl。
退出条件
1. 车辆未搜索到车位;
2. 或者车辆未泊入车位;
3. 或者车辆与障碍物发生碰撞;
4. 或者在泊入完成前系统发出接管请求。
垂直划线车位——两侧存在静止车辆且车位有直立儿童
测试场景:
测试场景如下图所示。儿童假人位于目标车位中心。
测试方法
驾驶员驱动车辆行驶经过垂直车位并开启记忆泊车系统,测试车辆停在目标车位旁边后,驾驶员离开车,开启记忆泊车。
退出条件
1. 车辆未搜索到车位;
2. 或者车辆未泊入车位;
3. 或者车辆与障碍物发生碰撞;
4. 或者在泊入完成前系统发出接管请求。
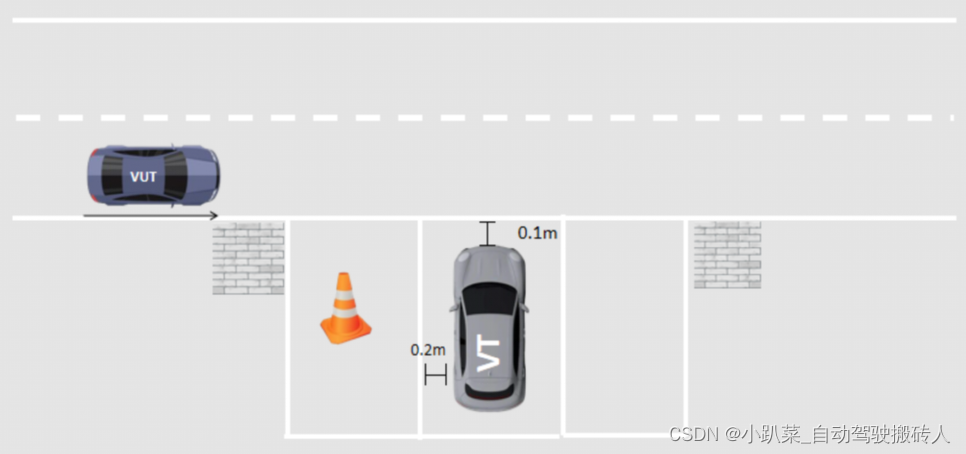
垂直划线车位——两侧存在静止车辆且车位内存在锥桶
测试场景:
测试场景如下图所示。锥桶位于目标车位中心。

测试方法
驾驶员驱动车辆行驶经过垂直车位并开启记忆泊车系统,测试车辆停在目标车位旁边后,驾驶员离开车,开启记忆泊车。
退出条件
1. 车辆未搜索到车位;
2. 或者车辆未泊入车位;
3. 或者车辆与障碍物发生碰撞;
4. 或者在泊入完成前系统发出接管请求。
斜列划线车位——两侧存在静止车辆
测试场景:
测试场景如下图所示。
测试方法
1. 驾驶员驱动车辆行驶经过垂直车位并开启记忆泊车系统,测试车辆停在目标车位旁边后,驾驶员离开车,开启记忆泊车;
2. 试验完成后,记录揉库次数、车辆前后轮外侧接地点与车位边界线内侧的最小距离Δd、车辆最前端与最后端距离车位边界线内侧边缘的最小距离Δl。

退出条件
1. 车辆未搜索到车位;
2. 或者车辆未泊入车位;
3. 或者车辆与障碍物发生碰撞;
4. 或者在泊入完成前系统发出接管请求。
巡航能力
车位搜寻过程中遇到车辆制动
测试场景:
测试场景如下图所示。
测试方法
1. 试验车辆启动记忆泊车系统,沿泊车路径行驶;
2. 试验车辆直线行驶路径前方25±10m位置处设置运动目标车辆,目标车辆行驶速度与试验车辆巡航稳定速度相差为3±1km/h;
3. 当试验车辆稳定跟随目标车辆行驶至少2s后,目标车辆以-2m/s2的减速度减速至停止。
退出条件
1. 车辆未泊入车位或与其他车辆发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆停靠在目标车后。
车位搜寻过程遇到车辆驶出车位
测试场景:
测试场景如下图所示。
测试方法
1. 试验车辆启动记忆泊车系统,沿泊车路径行驶;
2. 目标车辆由静止经1s加速至5km/h后匀速行驶,预计碰撞位置为目标车辆前端与试验车辆前端中电对齐。
退出条件
1. 车辆在行使过程中与其他车辆或障碍物发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆到达目标车位;
4. 或者车辆退出泊车系统。
车位搜寻过程遇到行人缓行
测试场景:
测试场景如下图所示。停车位上车辆非强制要求。
测试方法
1. 试验车辆启动记忆泊车系统,沿泊车路径行驶;
2. 试验车辆直线行驶路径前方设置沿车辆行进方向行走的假人,试验车辆距离假人至少THW=5s处时,成年假人经1s加速至5km/h并保持匀速运动,假人运动轨迹位于道路中间偏右0.5m处。
退出条件
1. 车辆在行使过程中与其他车辆或障碍物发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆到达目标车位;
4. 或者车辆退出泊车系统。
车位搜寻过程遇到有遮挡儿童横穿
测试场景:
测试场景如下图所示。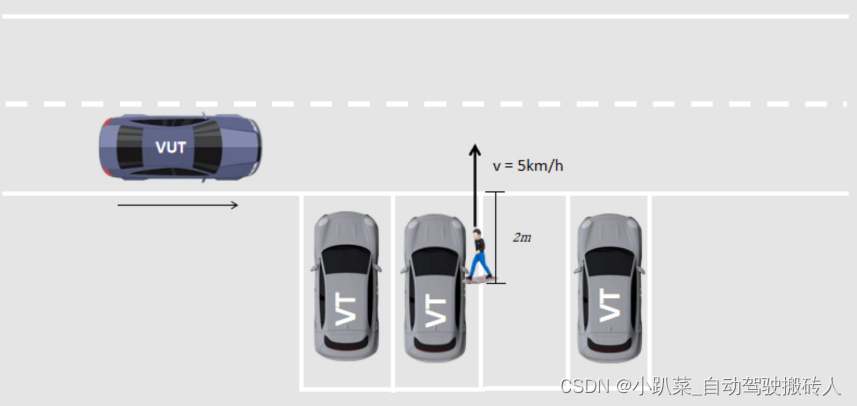
测试方法
1. 试验车辆启动记忆泊车系统,沿泊车路径行驶;
2. 目标儿童假人经1s加速至5km/h并保持匀速运动。
退出条件
1. 车辆在行使过程中与其他车辆或障碍物发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆到达目标车位;
4. 或者车辆退出泊车系统。
车位搜寻过程遇到临时交通障碍物
测试场景:
测试场景如下图所示。锥桶放置于道路方向45°夹角位置,数量为5个。
测试方法
1. 试验车辆启动记忆泊车系统,沿泊车路径行驶;
2. 试验车辆至少距锥桶前方20m达到稳定车速。
退出条件
1. 车辆在行使过程中与其他车辆或障碍物发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆到达目标车位;
4. 或者车辆退出泊车系统。
搜寻目标车位存在锥桶,相邻车位空余
测试场景:
测试场景如下图所示。目标车位中央存在锥桶,至少目标车位两侧存在空余车位。
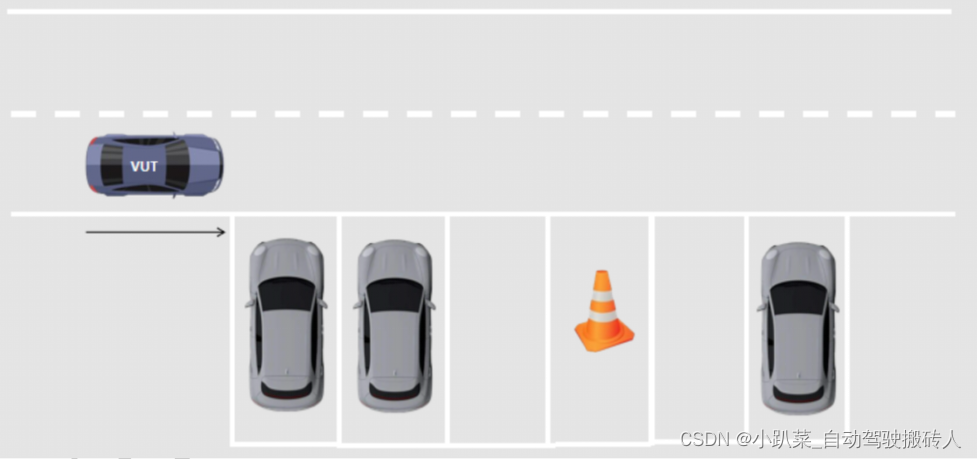
测试方法
试验车辆启动记忆泊车系统,沿泊车路径行驶;
退出条件
1. 车辆在行使过程中与其他车辆或障碍物发生碰撞;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆到达空余车位;
4. 或者车辆退出泊车系统。
室内停车场一键泊车测试方法
泊入能力
立柱车位——单侧有静止车辆
测试场景:
测试场景如下图所示。
测试方法
1. 随机选择左侧或右侧立柱车位,由驾驶员驱动测试车辆辅助记忆泊车系统学习泊车路径,待记忆泊车系统完成路径学习后,启动记忆泊车;
2. 试验完成后,记录揉库次数、车辆前后轮外侧接地点与车位边界线内侧的最小距离Δd、车辆最前端与最后端距离车位边界线内侧边缘的最小距离Δl。
退出条件
1. 车辆未搜索到车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
立柱车位——单侧有静止车辆且车位内有平躺儿童
测试场景:
测试场景如下图所示。
测试方法
由驾驶员驱动测试车辆辅助记忆泊车系统学习泊车路径,待记忆泊车系统完成路径学习后,启动记忆泊车;
退出条件
1. 车辆未搜索到车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
立柱车位——单侧有静止车辆且车位内有锥桶
测试场景:
测试场景如下图所示。
测试方法
由驾驶员驱动测试车辆辅助记忆泊车系统学习泊车路径,待记忆泊车系统完成路径学习后,启动记忆泊车;
退出条件
1. 车辆未搜索到车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
墙面车位——单侧有静止车辆
测试场景:
测试场景如下图所示。
测试方法
1. 由驾驶员驱动测试车辆辅助记忆泊车系统学习泊车路径,待记忆泊车系统完成路径学习后,启动记忆泊车;
2. 试验完成后,记录揉库次数、车辆前后轮外侧接地点与车位边界线内侧的最小距离Δd、车辆最前端与最后端距离车位边界线内侧边缘的最小距离Δl。
退出条件
1. 车辆未搜索到车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
单层巡航能力
单层车位搜寻过程遇到静止车辆
测试场景:
测试场景如下图所示。
测试方法
驾驶员开启试验车辆记忆泊车系统,在泊车过程直线段遇到静止障碍车辆。
退出条件
1. 车辆停靠在目标车后或泊入目标车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
单层车位搜寻过程遇到静止行人
测试场景:
测试场景如下图所示。

测试方法
驾驶员开启试验车辆记忆泊车系统,在泊车过程直线段遇到静止行人。
退出条件
1. 车辆停靠在静止行人或泊入目标车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
单层车位搜寻过程遇到临时交通障碍物
测试场景:
测试场景如下图所示。
测试方法
驾驶员开启试验车辆记忆泊车系统,在泊车过程直线段遇到临时交通障碍物。
退出条件
1. 车辆停靠在锥桶或泊入目标车位;
2. 或者在泊入完成前系统发出接管请求;
3. 或者车辆未泊入车位;
4. 或者车辆发生碰撞。
搜寻目标车位存在锥桶,相邻车位空余
测试场景:
测试场景如下图所示。

测试方法
驾驶员开启试验车辆记忆泊车系统,沿泊车路径行驶。
退出条件
1. 在泊入完成前系统发出接管请求;
2. 或者车辆泊入相邻空余车位;
3. 或者车辆发生碰撞。
跨层巡航能力
跨层车位搜寻过程遇到儿童
测试场景:
测试场景如下图所示。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆按记忆路径搜寻车位。
退出条件
1. 在泊入完成前系统发出接管请求;
2. 或者车辆停靠在儿童假人后或泊入目标车位;
3. 或者车辆发生碰撞。
跨层车位搜寻过程遇到儿童锥桶
测试场景:
测试场景如下图所示。

测试方法
驾驶员开启试验车辆记忆泊车系统,测试车辆按记忆路径搜寻车位。
退出条件
1. 在泊入完成前系统发出接管请求;
2. 或者车辆停靠在儿童假人后或泊入目标车位;
3. 或者车辆发生碰撞。
说明书审查
对用户使用手册进行审查。审查内容包括:系统定义、驾驶员责任描述、使用条件描述和驾驶员状态监测描述。
系统状态提示
车辆启动后,在关闭系统的情况下记录系统的提示信息;
车辆启动后,开启系统,并在系统未激活的状态下记录系统提示信息;
车辆启动后,开启系统,并在系统激活的状态下记录系统提示信息。
驾驶员监控
测试场景:
测试选择露天停车场进行,允许记忆泊车系统运行的长直道不小于200m,试验车辆开起记忆泊车系统在路径上行驶。
测试方法:
系统开启后,试验车辆达到记忆泊车设定车速,驾驶员分别闭眼2s以上以及低头3s以上,对车辆仪表以及驾驶员面部进行录制,对报警声音进行录制。
退出条件:
1. 数据录制达到1分钟后记忆泊车系统运行完成;
2.系统关闭或者系统进入MRM。
风险处置测试方法
道路闭塞测试方法
测试场景:
测试选择露天停车场进行。泊车行驶路径存在一排锥桶封闭测试道路,相邻锥桶间隔1~1.5m,封闭试验车辆前进路径的锥桶旁可留空余车位。如下图所示。
测试方法:
试验车辆启动记忆泊车系统,沿路径行驶。
退出条件:
1. 试验车辆在行驶过程中与其他车辆或障碍物发生碰撞;
2. 记忆泊车系统发出异常提示。
摄像头失效测试方法
测试场景:
测试场景如下图所示。

测试方法:
试验车辆启动记忆泊车系统,沿路径行驶。当试验车辆在车道内行驶、泊如车位、泊出车位的过程中,分别进行摄像头遮挡(分3次试验进行),且至少遮挡一个与记忆泊车系统关联的摄像头,并始终进行图像及数据记录,遮挡方式如下要求。
| 摄像头遮挡方式 | |||
|---|---|---|---|
| 遮挡位置 | 遮挡材料 | 遮挡面积 | 遮挡描述 |
| 与记忆泊车系统关联的摄像头 | 黑色硬质遮光材料 | 100% | 采用自动化遮挡装置,在不影响系统正常功能情况下,将遮挡装置固定在摄像头周边,在系统激活状态下,触发遮挡按钮后,对摄像头进行遮挡 |
退出条件:
1. 试验车辆在行驶过程中与其他车辆或障碍物发生碰撞;
2. 记忆泊车系统发出异常提示。
系统断电测试方法
测试场景:
测试场景如下图所示。
测试方法:
试验车辆启动记忆泊车系统,沿路径行驶。当试验车辆在车道内行驶、泊如车位、泊出车位的过程中,分别进行摄像头断电(分3次试验进行),且至少断电一个与记忆泊车系统关联的摄像头,并始终进行图像及数据记录,遮挡方式如下要求。
| 摄像头遮挡方式 | |||
|---|---|---|---|
| 断电系统 | 断电装置 | 断电位置 | 断电描述 |
| 与记忆泊车系统关联的摄像头系统 | 自动化断电装置 | 摄像头的供电电源 | 采用自动化断电装置,在不影响系统正常功能情况下,将摄像头系统的供电电源接到断电装置上,在系统激活状态下,触发断电按钮后,对摄像头系统进行断电 |
退出条件:
1. 试验车辆在行驶过程中与其他车辆或障碍物发生碰撞;
2. 记忆泊车系统发出异常提示。