[足式机器人]Part2 Dr. CAN学习笔记-Ch0-1矩阵的导数运算
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-Ch0-1矩阵的导数运算
- 1. 标量向量方程对向量求导,分母布局,分子布局
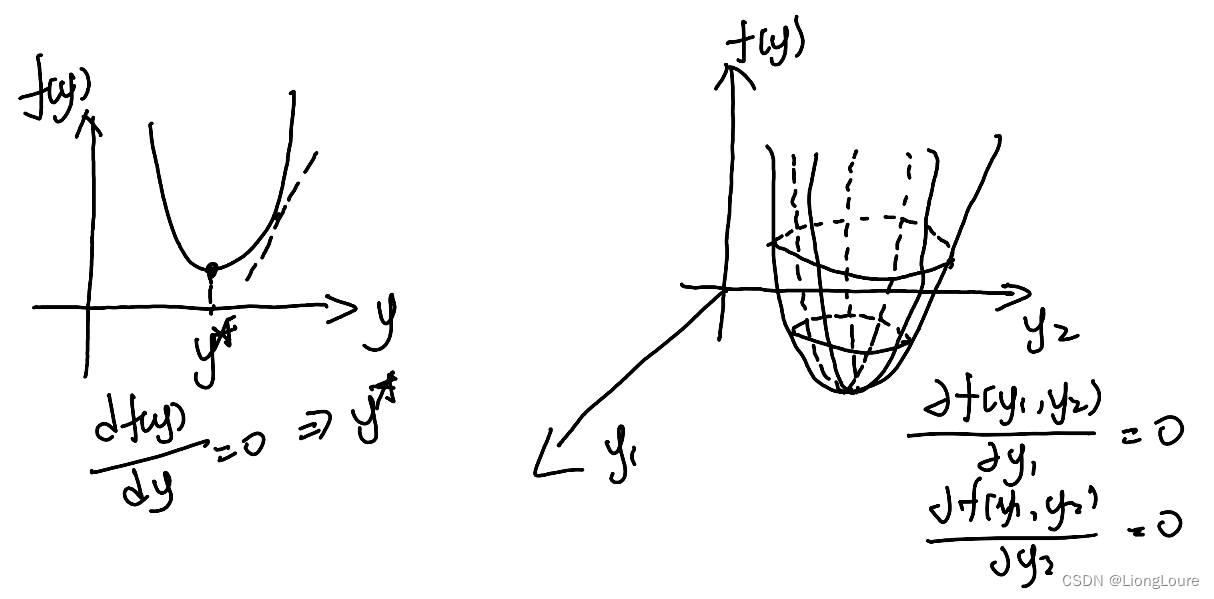
- 1.1 标量方程对向量的导数
- 1.2 向量方程对向量的导数
- 2. 案例分析,线性回归
- 3. 矩阵求导的链式法则
1. 标量向量方程对向量求导,分母布局,分子布局
1.1 标量方程对向量的导数
-
y
y
y 为 一元向量 或 二元向量
-
y
y
y为多元向量
y ⃗ = [ y 1 , y 2 , ⋯ , y n ] ⇒ ∂ f ( y ⃗ ) ∂ y ⃗ \vec{y}=\left[ y_1,y_2,\cdots ,y_{\mathrm{n}} \right] \Rightarrow \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}} y=[y1,y2,⋯,yn]⇒∂y∂f(y)
其中: f ( y ⃗ ) f\left( \vec{y} \right) f(y) 为标量 1 × 1 1\times 1 1×1, y ⃗ \vec{y} y为向量 1 × n 1\times n 1×n
分母布局 Denominator Layout——行数与分母相同
∂ f ( y ⃗ ) ∂ y ⃗ = [ ∂ f ( y ⃗ ) ∂ y 1 ⋮ ∂ f ( y ⃗ ) ∂ y n ] n × 1 \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}}=\left[ \begin{array}{c} \frac{\partial f\left( \vec{y} \right)}{\partial y_1}\\ \vdots\\ \frac{\partial f\left( \vec{y} \right)}{\partial y_{\mathrm{n}}}\\ \end{array} \right] _{n\times 1} ∂y∂f(y)= ∂y1∂f(y)⋮∂yn∂f(y) n×1分子布局 Nunerator Layout——行数与分子相同
∂ f ( y ⃗ ) ∂ y ⃗ = [ ∂ f ( y ⃗ ) ∂ y 1 ⋯ ∂ f ( y ⃗ ) ∂ y n ] 1 × n \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}}=\left[ \begin{matrix} \frac{\partial f\left( \vec{y} \right)}{\partial y_1}& \cdots& \frac{\partial f\left( \vec{y} \right)}{\partial y_{\mathrm{n}}}\\ \end{matrix} \right] _{1\times n} ∂y∂f(y)=[∂y1∂f(y)⋯∂yn∂f(y)]1×n
1.2 向量方程对向量的导数
f
⃗
(
y
⃗
)
=
[
f
⃗
1
(
y
⃗
)
⋮
f
⃗
n
(
y
⃗
)
]
n
×
1
,
y
⃗
=
[
y
1
⋮
y
m
]
m
×
1
\vec{f}\left( \vec{y} \right) =\left[ \begin{array}{c} \vec{f}_1\left( \vec{y} \right)\\ \vdots\\ \vec{f}_{\mathrm{n}}\left( \vec{y} \right)\\ \end{array} \right] _{n\times 1},\vec{y}=\left[ \begin{array}{c} y_1\\ \vdots\\ y_{\mathrm{m}}\\ \end{array} \right] _{\mathrm{m}\times 1}
f(y)=
f1(y)⋮fn(y)
n×1,y=
y1⋮ym
m×1
∂
f
⃗
(
y
⃗
)
n
×
1
∂
y
⃗
m
×
1
=
[
∂
f
⃗
(
y
⃗
)
∂
y
1
⋮
∂
f
⃗
(
y
⃗
)
∂
y
m
]
m
×
1
=
[
∂
f
1
(
y
⃗
)
∂
y
1
⋯
∂
f
n
(
y
⃗
)
∂
y
1
⋮
⋱
⋮
∂
f
1
(
y
⃗
)
∂
y
m
⋯
∂
f
n
(
y
⃗
)
∂
y
m
]
m
×
n
\frac{\partial \vec{f}\left( \vec{y} \right) _{n\times 1}}{\partial \vec{y}_{\mathrm{m}\times 1}}=\left[ \begin{array}{c} \frac{\partial \vec{f}\left( \vec{y} \right)}{\partial y_1}\\ \vdots\\ \frac{\partial \vec{f}\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}\\ \end{array} \right] _{\mathrm{m}\times 1}=\left[ \begin{matrix} \frac{\partial f_1\left( \vec{y} \right)}{\partial y_1}& \cdots& \frac{\partial f_{\mathrm{n}}\left( \vec{y} \right)}{\partial y_1}\\ \vdots& \ddots& \vdots\\ \frac{\partial f_1\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}& \cdots& \frac{\partial f_{\mathrm{n}}\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}\\ \end{matrix} \right] _{\mathrm{m}\times \mathrm{n}}
∂ym×1∂f(y)n×1=
∂y1∂f(y)⋮∂ym∂f(y)
m×1=
∂y1∂f1(y)⋮∂ym∂f1(y)⋯⋱⋯∂y1∂fn(y)⋮∂ym∂fn(y)
m×n, 为分母布局
若: y ⃗ = [ y 1 ⋮ y m ] m × 1 , A = [ a 11 ⋯ a 1 n ⋮ ⋱ ⋮ a m 1 ⋯ a m n ] \vec{y}=\left[ \begin{array}{c} y_1\\ \vdots\\ y_{\mathrm{m}}\\ \end{array} \right] _{\mathrm{m}\times 1}, A=\left[ \begin{matrix} a_{11}& \cdots& a_{1\mathrm{n}}\\ \vdots& \ddots& \vdots\\ a_{\mathrm{m}1}& \cdots& a_{\mathrm{mn}}\\ \end{matrix} \right] y= y1⋮ym m×1,A= a11⋮am1⋯⋱⋯a1n⋮amn , 则有:
- ∂ A y ⃗ ∂ y ⃗ = A T \frac{\partial A\vec{y}}{\partial \vec{y}}=A^{\mathrm{T}} ∂y∂Ay=AT(分母布局)
- ∂ y ⃗ T A y ⃗ ∂ y ⃗ = A y ⃗ + A T y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=A\vec{y}+A^{\mathrm{T}}\vec{y} ∂y∂yTAy=Ay+ATy, 当 A = A T A=A^{\mathrm{T}} A=AT时, ∂ y ⃗ T A y ⃗ ∂ y ⃗ = 2 A y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=2A\vec{y} ∂y∂yTAy=2Ay
若为分子布局,则有: ∂ A y ⃗ ∂ y ⃗ = A \frac{\partial A\vec{y}}{\partial \vec{y}}=A ∂y∂Ay=A
2. 案例分析,线性回归
- ∂ A y ⃗ ∂ y ⃗ = A T \frac{\partial A\vec{y}}{\partial \vec{y}}=A^{\mathrm{T}} ∂y∂Ay=AT(分母布局)
- ∂ y ⃗ T A y ⃗ ∂ y ⃗ = A y ⃗ + A T y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=A\vec{y}+A^{\mathrm{T}}\vec{y} ∂y∂yTAy=Ay+ATy, 当 A = A T A=A^{\mathrm{T}} A=AT时, ∂ y ⃗ T A y ⃗ ∂ y ⃗ = 2 A y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=2A\vec{y} ∂y∂yTAy=2Ay
Linear Regression 线性回归
z
^
=
y
1
+
y
2
x
⇒
J
=
∑
i
=
1
n
[
z
i
−
(
y
1
+
y
2
x
i
)
]
2
\hat{z}=y_1+y_2x\Rightarrow J=\sum_{i=1}^n{\left[ z_i-\left( y_1+y_2x_i \right) \right] ^2}
z^=y1+y2x⇒J=i=1∑n[zi−(y1+y2xi)]2
找到
y
1
,
y
2
y_1,y_2
y1,y2 使得
J
J
J最小
z
⃗
=
[
z
1
⋮
z
n
]
,
[
x
⃗
]
=
[
1
x
1
⋮
⋮
1
x
n
]
,
y
⃗
=
[
y
1
y
2
]
⇒
z
⃗
^
=
[
x
⃗
]
y
⃗
=
[
y
1
+
y
2
x
1
⋮
y
1
+
y
2
x
n
]
\vec{z}=\left[ \begin{array}{c} z_1\\ \vdots\\ z_{\mathrm{n}}\\ \end{array} \right] ,\left[ \vec{x} \right] =\left[ \begin{array}{l} 1& x_1\\ \vdots& \vdots\\ 1& x_{\mathrm{n}}\\ \end{array} \right] ,\vec{y}=\left[ \begin{array}{c} y_1\\ y_2\\ \end{array} \right] \Rightarrow \hat{\vec{z}}=\left[ \vec{x} \right] \vec{y}=\left[ \begin{array}{c} y_1+y_2x_1\\ \vdots\\ y_1+y_2x_{\mathrm{n}}\\ \end{array} \right]
z=
z1⋮zn
,[x]=
1⋮1x1⋮xn
,y=[y1y2]⇒z^=[x]y=
y1+y2x1⋮y1+y2xn
J
=
[
z
⃗
−
z
⃗
^
]
T
[
z
⃗
−
z
⃗
^
]
=
[
z
⃗
−
[
x
⃗
]
y
⃗
]
T
[
z
⃗
−
[
x
⃗
]
y
⃗
]
=
z
⃗
z
⃗
T
−
z
⃗
T
[
x
⃗
]
y
⃗
−
y
⃗
T
[
x
⃗
]
T
z
⃗
+
y
⃗
T
[
x
⃗
]
T
[
x
⃗
]
y
⃗
J=\left[ \vec{z}-\hat{\vec{z}} \right] ^{\mathrm{T}}\left[ \vec{z}-\hat{\vec{z}} \right] =\left[ \vec{z}-\left[ \vec{x} \right] \vec{y} \right] ^{\mathrm{T}}\left[ \vec{z}-\left[ \vec{x} \right] \vec{y} \right] =\vec{z}\vec{z}^{\mathrm{T}}-\vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}-\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z}+\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}
J=[z−z^]T[z−z^]=[z−[x]y]T[z−[x]y]=zzT−zT[x]y−yT[x]Tz+yT[x]T[x]y
其中:
(
z
⃗
T
[
x
⃗
]
y
⃗
)
T
=
y
⃗
T
[
x
⃗
]
T
z
⃗
\left( \vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y} \right) ^{\mathrm{T}}=\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z}
(zT[x]y)T=yT[x]Tz, 则有:
J
=
z
⃗
z
⃗
T
−
2
z
⃗
T
[
x
⃗
]
y
⃗
+
y
⃗
T
[
x
⃗
]
T
[
x
⃗
]
y
⃗
J=\vec{z}\vec{z}^{\mathrm{T}}-2\vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}+\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}
J=zzT−2zT[x]y+yT[x]T[x]y
进而:
∂
J
∂
y
⃗
=
0
−
2
(
z
⃗
T
[
x
⃗
]
)
T
+
2
[
x
⃗
]
T
[
x
⃗
]
y
⃗
=
∇
y
⃗
⟹
∂
J
∂
y
⃗
∗
=
0
,
y
⃗
∗
=
(
[
x
⃗
]
T
[
x
⃗
]
)
−
1
[
x
⃗
]
T
z
⃗
\frac{\partial J}{\partial \vec{y}}=0-2\left( \vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{\mathrm{T}}+2\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}=\nabla \vec{y}\Longrightarrow \frac{\partial J}{\partial \vec{y}^*}=0,\vec{y}^*=\left( \left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{-1}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z}
∂y∂J=0−2(zT[x])T+2[x]T[x]y=∇y⟹∂y∗∂J=0,y∗=([x]T[x])−1[x]Tz
其中:
(
[
x
⃗
]
T
[
x
⃗
]
)
−
1
\left( \left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{-1}
([x]T[x])−1不一定有解,则
y
⃗
∗
\vec{y}^*
y∗无法得到解析解——定义初始
y
⃗
∗
\vec{y}^*
y∗,
y
⃗
∗
=
y
⃗
∗
−
α
∇
,
α
=
[
α
1
0
0
α
2
]
\vec{y}^*=\vec{y}^*-\alpha \nabla ,\alpha =\left[ \begin{matrix} \alpha _1& 0\\ 0& \alpha _2\\ \end{matrix} \right]
y∗=y∗−α∇,α=[α100α2]
其中:
α
\alpha
α称为学习率,对
x
x
x而言则需进行归一化
3. 矩阵求导的链式法则
标量函数: J = f ( y ( u ) ) , ∂ J ∂ u = ∂ J ∂ y ∂ y ∂ u J=f\left( y\left( u \right) \right) ,\frac{\partial J}{\partial u}=\frac{\partial J}{\partial y}\frac{\partial y}{\partial u} J=f(y(u)),∂u∂J=∂y∂J∂u∂y
标量对向量求导: J = f ( y ⃗ ( u ⃗ ) ) , y ⃗ = [ y 1 ( u ⃗ ) ⋮ y m ( u ⃗ ) ] m × 1 , u ⃗ = [ u ⃗ 1 ⋮ u ⃗ n ] n × 1 J=f\left( \vec{y}\left( \vec{u} \right) \right) ,\vec{y}=\left[ \begin{array}{c} y_1\left( \vec{u} \right)\\ \vdots\\ y_{\mathrm{m}}\left( \vec{u} \right)\\ \end{array} \right] _{m\times 1},\vec{u}=\left[ \begin{array}{c} \vec{u}_1\\ \vdots\\ \vec{u}_{\mathrm{n}}\\ \end{array} \right] _{\mathrm{n}\times 1} J=f(y(u)),y= y1(u)⋮ym(u) m×1,u= u1⋮un n×1
分析: ∂ J 1 × 1 ∂ u n × 1 n × 1 = ∂ J ∂ y m × 1 m × 1 ∂ y m × 1 ∂ u n × 1 n × m \frac{\partial J_{1\times 1}}{\partial u_{\mathrm{n}\times 1}}_{\mathrm{n}\times 1}=\frac{\partial J}{\partial y_{m\times 1}}_{m\times 1}\frac{\partial y_{m\times 1}}{\partial u_{\mathrm{n}\times 1}}_{\mathrm{n}\times \mathrm{m}} ∂un×1∂J1×1n×1=∂ym×1∂Jm×1∂un×1∂ym×1n×m 无法相乘
y ⃗ = [ y 1 ( u ⃗ ) y 2 ( u ⃗ ) ] 2 × 1 , u ⃗ = [ u ⃗ 1 u ⃗ 2 u ⃗ 3 ] 3 × 1 \vec{y}=\left[ \begin{array}{c} y_1\left( \vec{u} \right)\\ y_2\left( \vec{u} \right)\\ \end{array} \right] _{2\times 1},\vec{u}=\left[ \begin{array}{c} \vec{u}_1\\ \vec{u}_2\\ \vec{u}_3\\ \end{array} \right] _{3\times 1} y=[y1(u)y2(u)]2×1,u= u1u2u3 3×1
J = f ( y ⃗ ( u ⃗ ) ) , ∂ J ∂ u ⃗ = [ ∂ J ∂ u ⃗ 1 ∂ J ∂ u ⃗ 2 ∂ J ∂ u ⃗ 3 ] 3 × 1 ⟹ ∂ J ∂ u ⃗ 1 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 1 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 1 ∂ J ∂ u ⃗ 2 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 2 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 2 ∂ J ∂ u ⃗ 3 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 3 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 3 ⟹ ∂ J ∂ u ⃗ = [ ∂ y 1 ( u ⃗ ) ∂ u ⃗ 1 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 2 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 3 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 3 ] 3 × 2 [ ∂ J ∂ y 1 ∂ J ∂ y 2 ] 2 × 2 = ∂ y ⃗ ( u ⃗ ) ∂ u ⃗ ∂ J ∂ y ⃗ J=f\left( \vec{y}\left( \vec{u} \right) \right) ,\frac{\partial J}{\partial \vec{u}}=\left[ \begin{array}{c} \frac{\partial J}{\partial \vec{u}_1}\\ \frac{\partial J}{\partial \vec{u}_2}\\ \frac{\partial J}{\partial \vec{u}_3}\\ \end{array} \right] _{3\times 1}\Longrightarrow \begin{array}{c} \frac{\partial J}{\partial \vec{u}_1}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_1}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_1}\\ \frac{\partial J}{\partial \vec{u}_2}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_2}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_2}\\ \frac{\partial J}{\partial \vec{u}_3}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_3}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_3}\\ \end{array} \\ \Longrightarrow \frac{\partial J}{\partial \vec{u}}=\left[ \begin{array}{l} \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_1}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_1}\\ \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_2}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_2}\\ \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_3}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_3}\\ \end{array} \right] _{3\times 2}\left[ \begin{array}{c} \frac{\partial J}{\partial y_1}\\ \frac{\partial J}{\partial y_2}\\ \end{array} \right] _{2\times 2}=\frac{\partial \vec{y}\left( \vec{u} \right)}{\partial \vec{u}}\frac{\partial J}{\partial \vec{y}} J=f(y(u)),∂u∂J= ∂u1∂J∂u2∂J∂u3∂J 3×1⟹∂u1∂J=∂y1∂J∂u1∂y1(u)+∂y2∂J∂u1∂y2(u)∂u2∂J=∂y1∂J∂u2∂y1(u)+∂y2∂J∂u2∂y2(u)∂u3∂J=∂y1∂J∂u3∂y1(u)+∂y2∂J∂u3∂y2(u)⟹∂u∂J= ∂u1∂y1(u)∂u2∂y1(u)∂u3∂y1(u)∂u1∂y2(u)∂u2∂y2(u)∂u3∂y2(u) 3×2[∂y1∂J∂y2∂J]2×2=∂u∂y(u)∂y∂J
∂ J ∂ u ⃗ = ∂ y ⃗ ( u ⃗ ) ∂ u ⃗ ∂ J ∂ y ⃗ \frac{\partial J}{\partial \vec{u}}=\frac{\partial \vec{y}\left( \vec{u} \right)}{\partial \vec{u}}\frac{\partial J}{\partial \vec{y}} ∂u∂J=∂u∂y(u)∂y∂J
eg:
x
⃗
[
k
+
1
]
=
A
x
⃗
[
k
]
+
B
u
⃗
[
k
]
,
J
=
x
⃗
T
[
k
+
1
]
x
⃗
[
k
+
1
]
\vec{x}\left[ k+1 \right] =A\vec{x}\left[ k \right] +B\vec{u}\left[ k \right] ,J=\vec{x}^{\mathrm{T}}\left[ k+1 \right] \vec{x}\left[ k+1 \right]
x[k+1]=Ax[k]+Bu[k],J=xT[k+1]x[k+1]
∂
J
∂
u
⃗
=
∂
x
⃗
[
k
+
1
]
∂
u
⃗
∂
J
∂
x
⃗
[
k
+
1
]
=
B
T
⋅
2
x
⃗
[
k
+
1
]
=
2
B
T
x
⃗
[
k
+
1
]
\frac{\partial J}{\partial \vec{u}}=\frac{\partial \vec{x}\left[ k+1 \right]}{\partial \vec{u}}\frac{\partial J}{\partial \vec{x}\left[ k+1 \right]}=B^{\mathrm{T}}\cdot 2\vec{x}\left[ k+1 \right] =2B^{\mathrm{T}}\vec{x}\left[ k+1 \right]
∂u∂J=∂u∂x[k+1]∂x[k+1]∂J=BT⋅2x[k+1]=2BTx[k+1]