目标检测中的损失函数:IOU_Loss、GIOU_Loss、DIOU_Loss和CIOU_Loss
文章目录
- 前言
- 1.IOU_Loss(Intersection over Union Loss)
- 2.GIOU_Loss(Generalized Intersection over Union Loss)
- 3.DIOU_Loss(Distance Intersection over Union Loss)
- 4.CIOU_Loss(Complete Intersection over Union Loss)
- 总结
前言
之前在项目中存在目标检测框内嵌的情况(目标检测框存在内嵌情况分析与解决),正好趁这个机会记录下目标检测中常用的几种IOU_loss函数。
1.IOU_Loss(Intersection over Union Loss)
IOU_Loss是目标检测任务中广泛使用的损失函数,其主要思想是通过计算预测框和真实框的交并比(IOU)来衡量两个框之间的重叠程度,并将其作为损失进行优化。
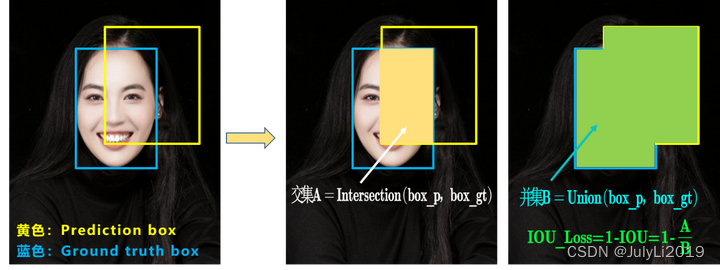
公式

其中,A为两框交集,B为两框并集;
可以看到IOU_Loss其实很简单,主要是交集/并集,但其实也存在两个问题。
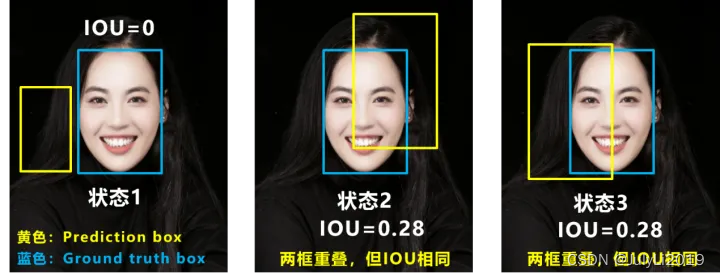
问题1:即状态1的情况,当预测框和目标框不相交时,IOU=0,无法反应两个框距离的远近,此时损失函数不可导,IOU_Loss无法优化两个框不相交的情况。
问题2:即状态2和状态3的情况,当两个预测框大小相同,两个IOU也相同,IOU_Loss无法区分两者相交情况的不同。
2.GIOU_Loss(Generalized Intersection over Union Loss)
GIOU_Loss是对IOU_Loss的改进,考虑了预测框和真实框之间的边界框面积不同的情况,引入了一个修正因子,使其更加准确。
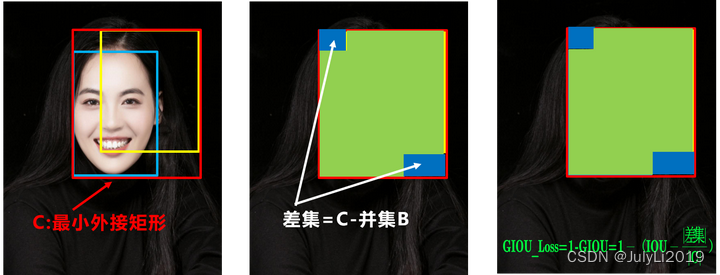
公式

其中,B为两框并集,C为能够包围两个框的最小外接矩形框的面积。
可以看到上图GIOU_Loss中,增加了相交尺度的衡量方式,缓解了单纯IOU_Loss时的尴尬。但为什么仅仅说缓解呢?因为还存在一种不足:
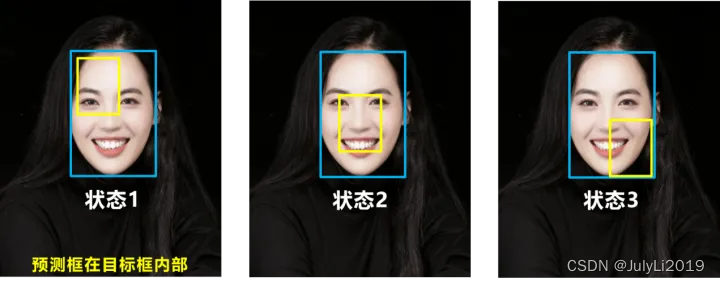
问题:状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIOU值也都是相同的,这时GIOU退化成了IOU,无法区分相对位置关系。
3.DIOU_Loss(Distance Intersection over Union Loss)
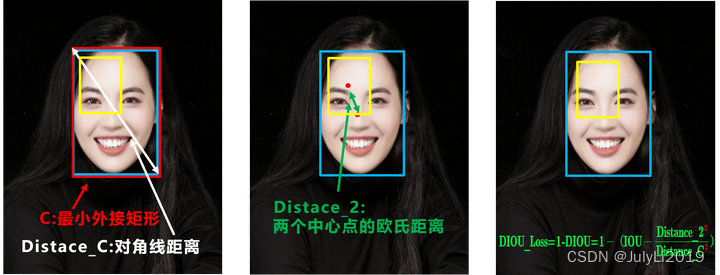
DIOU_Loss在GIOU_Loss的基础上引入了框心点之间的距离,进一步考虑了两个框之间的位置关系,使得损失函数更加全面。
公式
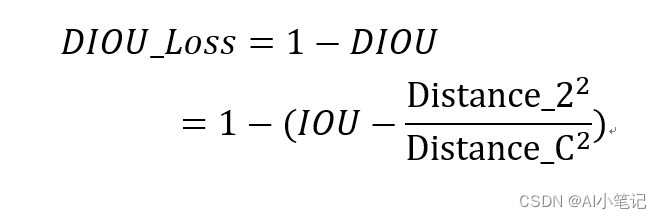
其中,Distance_2为两框中心点的欧式距离,Distance_C为最小外接矩形框的对角线距离。
DIOU_Loss考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIOU_Loss收敛的更快。
但就像前面好的目标框回归函数所说的,没有考虑到长宽比。

比如上面三种情况,目标框包裹预测框,本来DIOU_Loss可以起作用。
但预测框的中心点的位置都是一样的,因此按照DIOU_Loss的计算公式,三者的值都是相同的。
4.CIOU_Loss(Complete Intersection over Union Loss)
CIOU_Loss是对DIOU_Loss的进一步改进,考虑了宽高的比率对损失的影响,使得损失函数更具鲁棒性。
公式
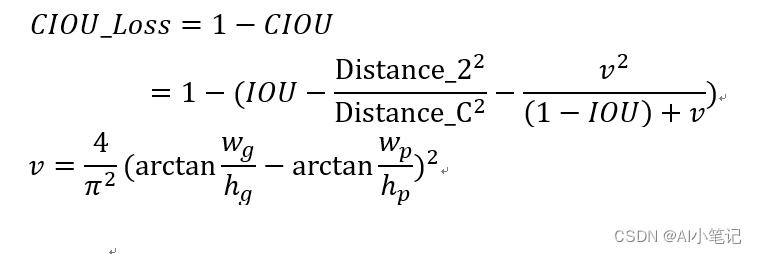
其中, v是衡量长宽比一致性的参数,wg,hg是真实框的宽和高,wp,hp是预测框的宽和高。
这样CIOU_Loss就将目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比全都考虑进去了。
总结
IOU_Loss作为传统的衡量标准,为我们提供了一个基础,而GIOU_Loss、DIOU_Loss和CIOU_Loss则在其基础上引入了更多的信息,如目标框的形状和相对位置等,从而使得模型更加准确地学习目标的位置和形状。
参考文档:
https://zhuanlan.zhihu.com/p/143747206
如果阅读本文对你有用,欢迎关注点赞留言收藏呀!!!
2023年12月4日20:03:02
