【NI-RIO入门】Real Time(实时系统解释)
1.什么是实时系统?
实时系统可以非常精确可靠的执行需要特定时许要求的系统,对于许多工程项目来说,通用操作系统,例如WINDOWS等标准PC上运行测量和控制程序是无法精确控制计时的,这些系统很容易受用户的其他程序、图像操作等其他后台任务的影响。
如果编程合理,实时操作系统可保证程序运行在时间上的稳定可靠性。 实时操作系统向用户提供任务优先级排序的高度控制权,也通常会允许用户检查任务执行是否符合时间上设定的要求。
通用操作系统经过优化,可以同时运行许多进程和应用程序,并提供其他功能,例如丰富的用户界面图形。
实时操作系统被设计为以非常精确的计时运行单个程序。
具体来说,实时操作系统可以让您:
- 在保证的最坏情况时间范围内执行任务
- 仔细考虑计划的不同部分的优先顺序
- 每次迭代的运行时间几乎相同(通常在微秒内)
- 检测循环是否错过了其计时目标
注意:此处会涉及到两个概念,软件定时和硬件定时。完全能保证时间精度的操作系统,称为硬实时操作系统。 多数情况下能保证时间精度的操作系统,称为软实时操作系统。
除了提供精确的计时之外,实时计算系统还可以设置为不间断可靠运行数天、数月或数年。 实时系统中通常还包含“看门狗”功能,以便在用户程序停止运行时自动重新启动整个计算机。
此外,实时系统中使用的硬件通常非常坚固,可以长时间承受恶劣的条件。
2.实时系统由哪些组件组成?

软件
- RTOS:这种特殊的操作系统旨在以非常精确的计时可靠地运行用户程序。
- 开发工具:需要编译器、链接器和调试器来生成与实时操作系统兼容的代码。
- 驱动程序:为了使实时操作系统与系统硬件和 I/O 模块进行通信,需要实时兼容的驱动程序,以保证大多数 I/O 操作的最坏情况时序。
硬件
- 具有实时驱动程序的 I/O 模块和系统硬件(包含在上面的软件部分中)。
- (可选)坚固的硬件:实时系统中使用的机箱可以设计为能够长期承受恶劣的环境。
- (可选)看门狗定时器:如果用户程序停止运行,集成的看门狗定时器可以自动重新启动整个计算机。
3.选择实时系统设备的理由
程序需要长时间可靠的运行
程序需要在一定时间内执行完成
对于安全生产有绝对的需求
实时系统通常只运行一个程序,且不具备用户界面,需要搭配上位机做用户界面
高速FPGA
设置应用程序中不同任务的优先级
性能普遍高于通用操作系统
响应中断时间固定
4.使用NI硬件构建实时系统
LabVIEW Real-Time 图形化编程
需要搭配NI的LabVIEW Real Time 模块使用,用户可以通过LabVIEW Real-Time能创建可靠的硬实时应用程序,再将其下载至硬件,并使用工具进行调试和运行。
用户可在实时应用程序中使用LabVIEW自带的大部分数学和信号处理算法,包括许多PID控制函数。 此外,您还可以使用MATLAB节点在实时系统上运行文本数学脚本,也可将Simulink软件或其他建模环境中创建的模型通过NI的模型工具包集成至实时系统。
开发、下载和运行应用程序
在LabVIEW中开发实时应用程序时,可使用LabVIEW项目浏览器来整理程序(VI)并为其分配将运行的硬件。用户将在通用Windows主机上开发代码,然后通过以太网或USB连接将代码部署至实时硬件。

在LabVIEW中开发实时程序与面向PC开发标准LabVIEW应用基本相同。Real-Time VI选板包含多个实时系统专用的附加函数,包括:
- 看门狗函数用于在程序停止运行时自动重启某些硬件终端
- 函数用于在实时程序的各部分之间进行确定性数据通信
- 实用程序用于在具备多个CPU核心的系统上配置负载平衡
- 定时函数用于精确控制实时程序中循环的执行
如需在硬件上测试LabVIEW Real-Time代码,仅需点击运行箭头,应用程序就会部署至实时硬件并开始运行。即使实时程序实际上是在实时终端上运行,用户也可在开发计算机上使用标准NI调试工具,例如高亮显示执行过程、单步执行和断点。
完成实时程序后,可在LabVIEW中生成可执行文件,并将其作为启动应用程序下载至实时硬件。重新启动实时硬件后,程序将自动以可靠地独立运行。
分配优先级
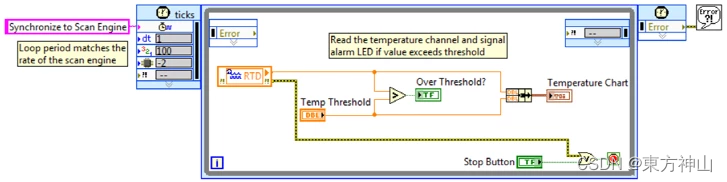
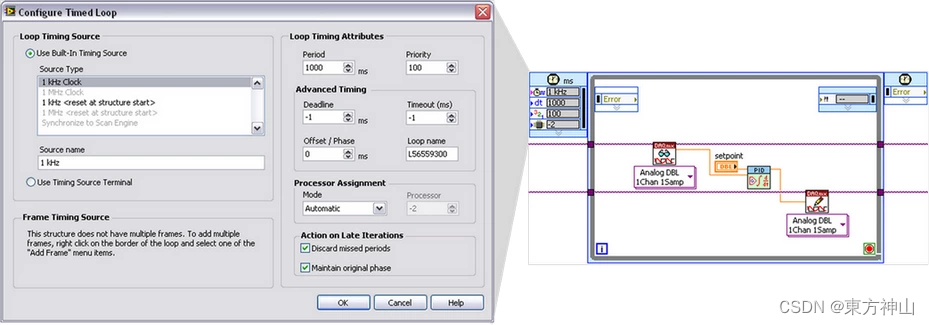
借助LabVIEW的数据流编程模式,用户无需使用文本编程语言的顺序架构。由于执行顺序由节点之间的数据流决定,用户可轻松创建能并行执行多个操作的应用程序。此外,LabVIEW还可通过定时循环结构轻松分配线程优先级。如下所示,每个循环都有一个可配置的定时源、周期、优先级等。
LabVIEW Real-Time支持多核处理,并自动将代码的并行部分映射至单独的操作系统线程,而无需手动创建和管理。默认情况下,这些线程也会在实时硬件上可用的CPU之间进行自动平衡。
为进一步提高实时系统的性能和可靠性,如有需要,可选择手动将定时循环分配给特定的处理器内核。例如,用户可将处理器的一个核心专用于执行一个关键时间循环,并将其与运行在不同核心上的次要任务隔离开来。
使用Real-Time Trace Viewer进行调试
对于高级多核调试,可使用Real-Time Trace Viewer来验证LabVIEW或LabWindows/CVI实时程序的性能,而无需停止或暂停代码执行。仅需少量修改实时代码,即可将应用程序性能记录至文件,并将其发送至主机进行查看和分析。 跟踪工具查看器以图形化方式显示多线程代码执行过程,同时高亮显示线程交换、互斥锁及内存分配。用户可使用Real-Time Trace Viewer,通过识别不需要的执行特征和难以发现的竞争状态来优化应用程序性能。
C和C++开发
如果用户组织以C或C++为标准编程语言,可使用LabWindows/CVI开发环境或其他开发环境。请注意,LabWindows/CVI Real-Time仅支持实时PXI控制器,而使用NI Linux Real-time的终端(如CompactRIO控制器)为开源设备,因此用户可自选开发工具。
有关使用C/C++ Development Tools开发Linux-Real Time的详细信息,请访问NI Linux Real-Time C/C++开发入门。
CompactRIO平台
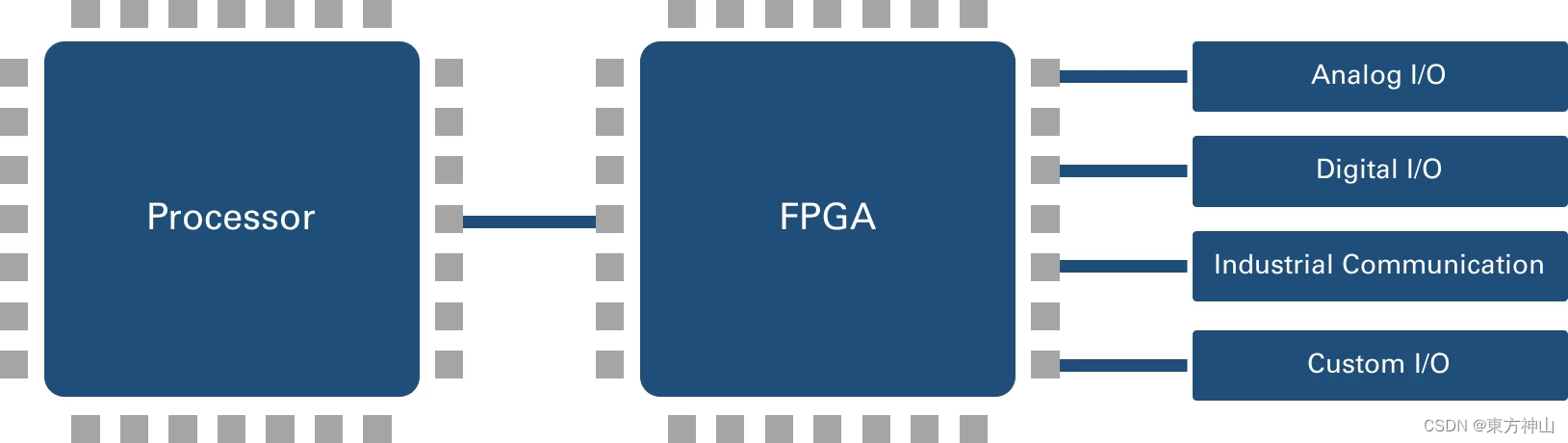
所有NI实时硬件平台均基于通用架构,这意味着使用LabVIEW Real-Time编写的程序仅需稍作修改或无需修改即可在不同的NI硬件上运行。具体来说,每个硬件平台均配备了现成即用的计算组件,包括处理器、RAM、非易失性存储和I/O总线接口。部分硬件平台配备用户可编程的FPGA,便于用户使用LabVIEW FPGA进行编程。

用户可使用LabVIEW Real-Time或自选的C/C++开发工具对CompactRIO控制器的处理器进行编程。也可使用LabVIEW FPGA开发FPGA代码。如需访问处理器上的I/O数据,可使用NI-DAQmx API(NI测量类最佳编程API)或NI扫描引擎。也可通过LabVIEW FPGA直接访问FPGA中的数据。
CompactRIO硬件通常用于状态监测、硬件在环测试、物理系统测试和机器控制等工业应用。
5.FAQ
问:移植RT程序到其他RIO设备时,linux的文件结构和路径是否会改变?
答:尽管文件路径表示法或文件系统结构存在差异,绝大多数 LabVIEW Real-Time 代码仍可在不同操作系统之间按原样运行。
但是有以下注意事项:
- NI Linux Real-Time 依赖于 UNIX 样式的文件路径,而不是 Windows 样式的文件路径。因此,NI Linux-Real Time 编程环境中的任何文件路径数据类型都将被强制转换为正确的 UNIX 样式文件路径。例如,带有“C:\”的文件路径常量将被强制为“/C”。
- NI Linux Real-Time也有不同的文件结构。因此,建议用户将文件放在特定用户的“home”目录中(默认情况下为 /home/lvuser)。有一个小的重定向层,因此对现有 LabVIEW Real-Time 代码的影响最小。
- 这一层重定向以及 UNIX 静态文件路径差异记录在目标上“/”下的“README_File_Paths.txt”文件中。有关此主题的更多信息,请参阅 使用实时目标上的文件路径
问:如果使用FTP进行文件传输
答:首先需要在NI MAX里为控制器安装FTP组件,
参考此链接:Using FTP With an NI Linux Real-Time Target - NI
WebDev或SSH也是可以替换掉文件传输方案:Using WebDAV to Transfer Files to Real-Time Target - NI
问:什么是实时系统的确定性?
答:运行在实时操作系统上的应用程序(或应用程序的关键性片段),如能保证时间精度,就认为是确定性的程序。
问:什么是抖动?
答:程序开始时,首次循环相对于后续循环在时间上的差异,称为抖动。 实时操作系统可确保在编程合理的情况下,抖动为最小水平;任务首次执行与后续循环执行所用的时间非常接近。
问:NI额外的软件支持?
答:NI支持官方发布的基础镜像里面的所有软件包,但是不支持OPKG生态里面的第三方工具包,这些需要用户自己学习使用。NI会遵守开源协议,提供liunx内核源代码,但不正式支持对于内核的修改。
问:RT出现故障以后应该怎么办?
答:在NI MAX里可以直接格式化磁盘。
问:Linux RT的文件系统可靠吗?
答:文件格式为UBIFS,NI进行了压力测试和断电损坏测试,是一种强大的文件系统。
问:与VxWorks和Pharlap相比,NI linux rt的线程优先级是否不同?
答:NI Linux Real-Time 上的优先级方案和调度的差异对您现有的实时应用程序影响不大。虽然 LinuxRT 和 VxWorks 之间的调度程序有所变化,但从基于 VxWorks 的目标转移不会导致调度/线程优先级出现任何明显差异。
定时结构优先级和LV优先级的工作方式与以前相同,除了任何“正常”优先级任务(例如:正常优先级VI)都不是由实时调度程序处理的,而是由Linux默认的完全公平调度程序(应该这样做)进行调度在 LV 和其他非 LV 线程之间调度正常优先级工作的更好)。
问:为 NI Linux Real-Time 目标构建 C/C++ 应用程序的首选交叉编译工具链是什么?
答:我们提供针对 NI Linux Real-Time 目标定制的 gcc 工具链。如需了解更多信息,请参阅此文档:为 NI Linux Real-Time 构建 C/C++ 应用程序
问:如何将 Linux 社区的其他软件添加到我的 NI Linux Real-Time 目标中?
答:您可以使用opkg软件包管理器来查找其他软件并将其安装到您的 NI Linux Real-Time 目标上。您需要访问互联网才能实现此功能。