基于APM(PIX)飞控和mission planner制作遥控无人车-从零搭建自主pix无人车普通舵机转向无人车-1(以乐迪crossflight飞控为例)
1.前期准备
准备通过舵机转向的无人车地盘、遥控器、地面站电脑、飞控等。安装驱动程序、端口程序、netframwork等,不再赘述。
2.安装固件
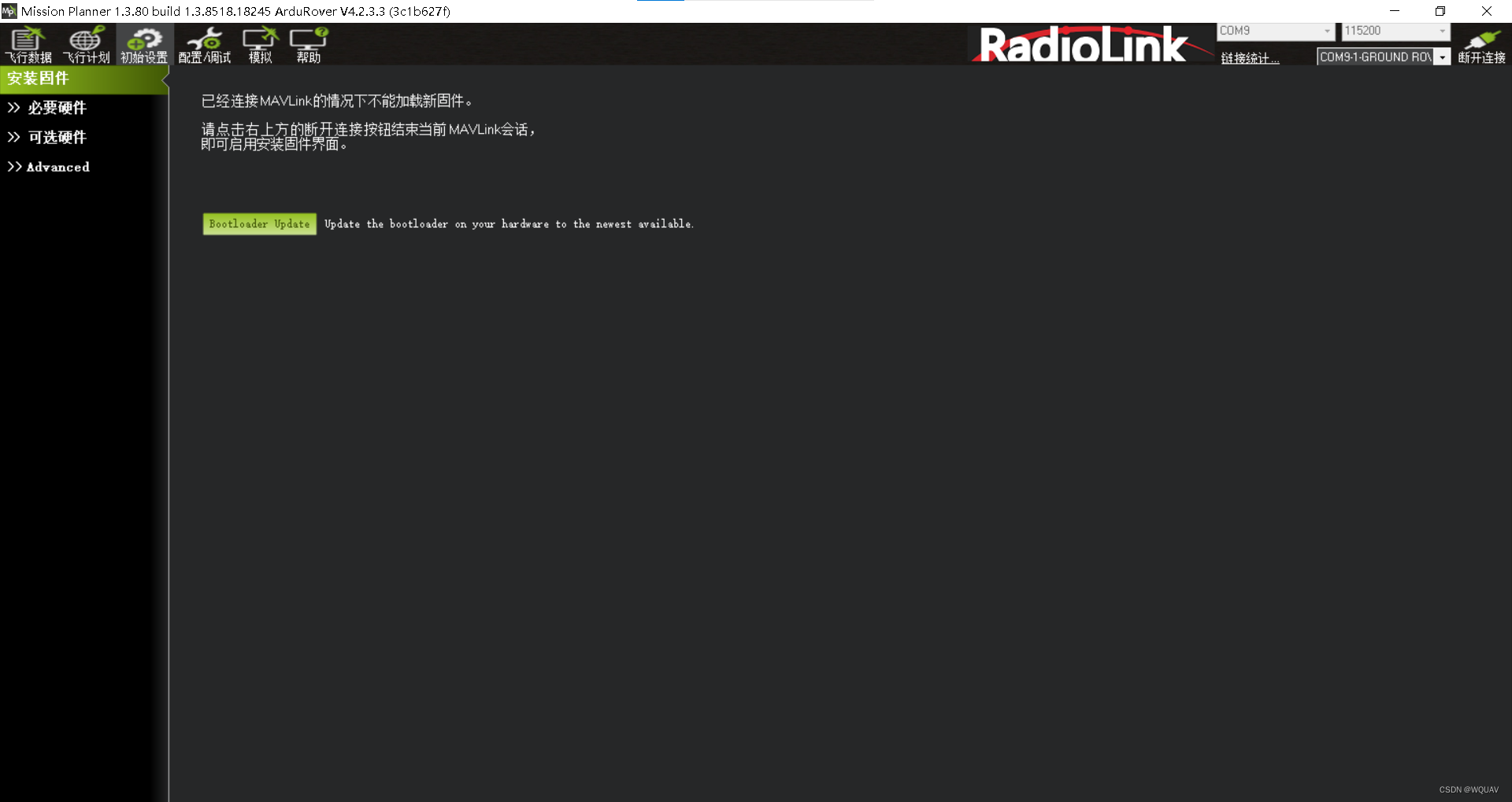
安装ardurover固件,如果在线失败,选择官方最新的固件下载到本地,选择本地安装。
3.调试
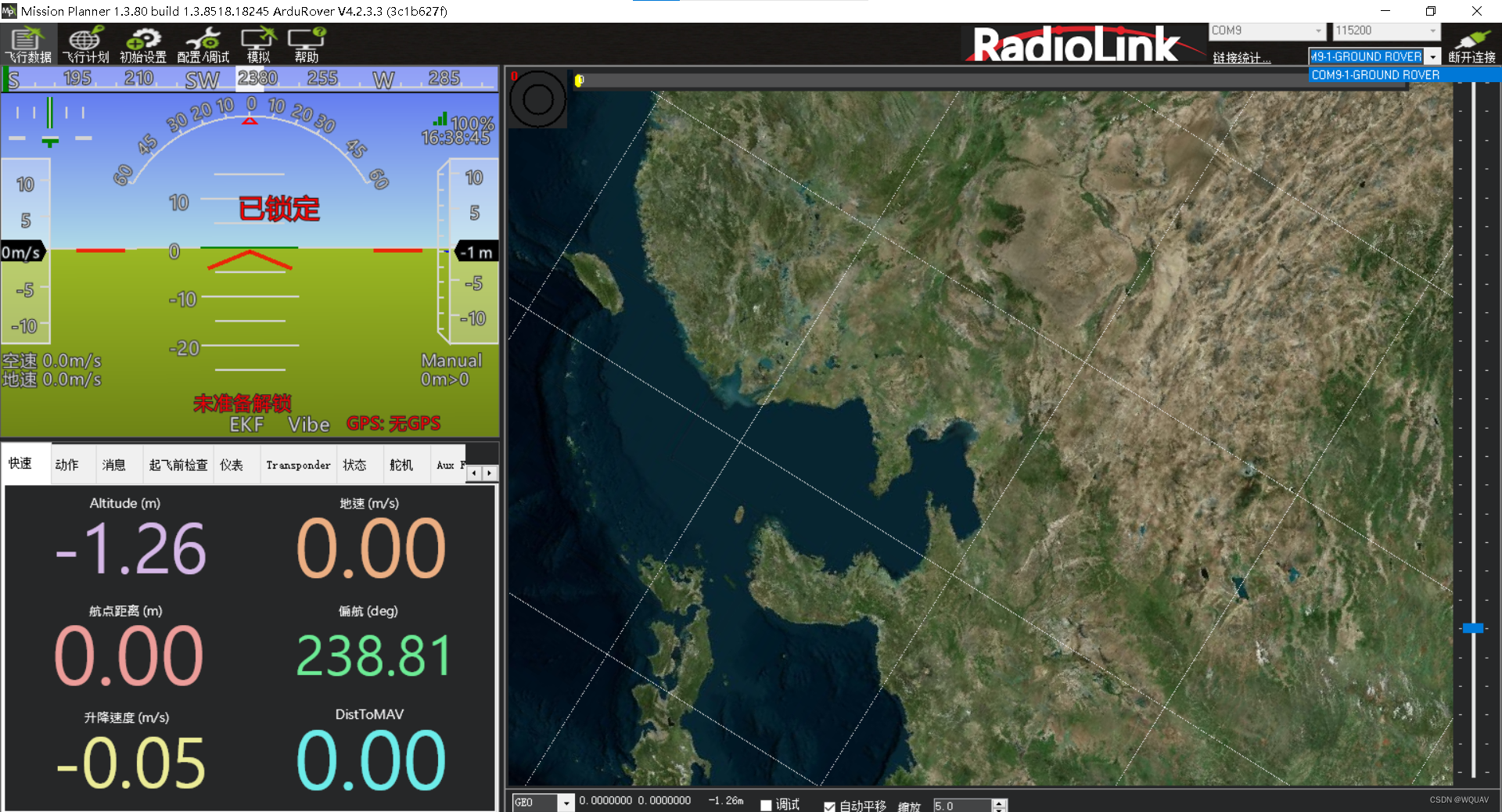
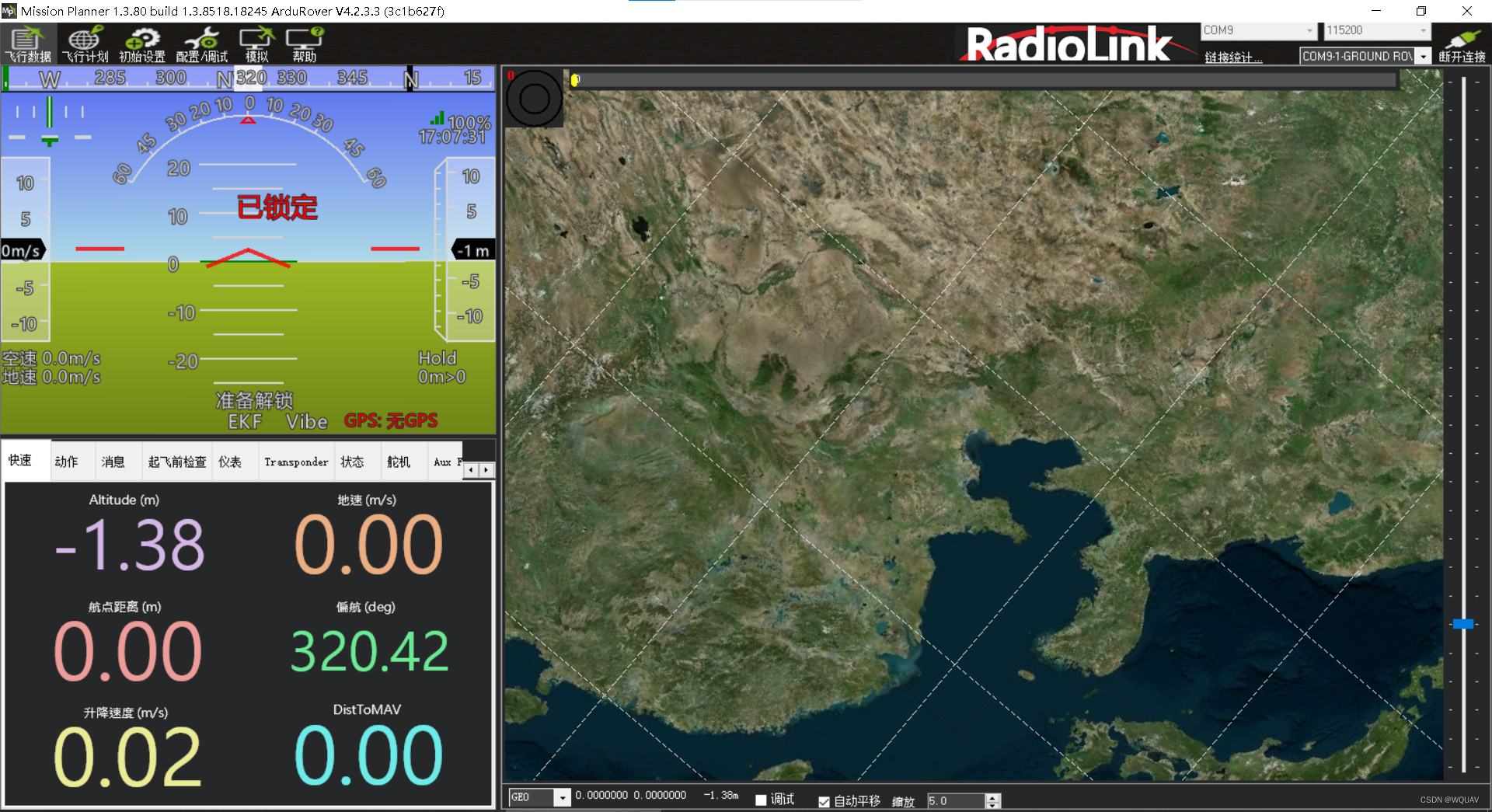
1.选择识别出的com口,连接飞控。
2.校准加速度计。
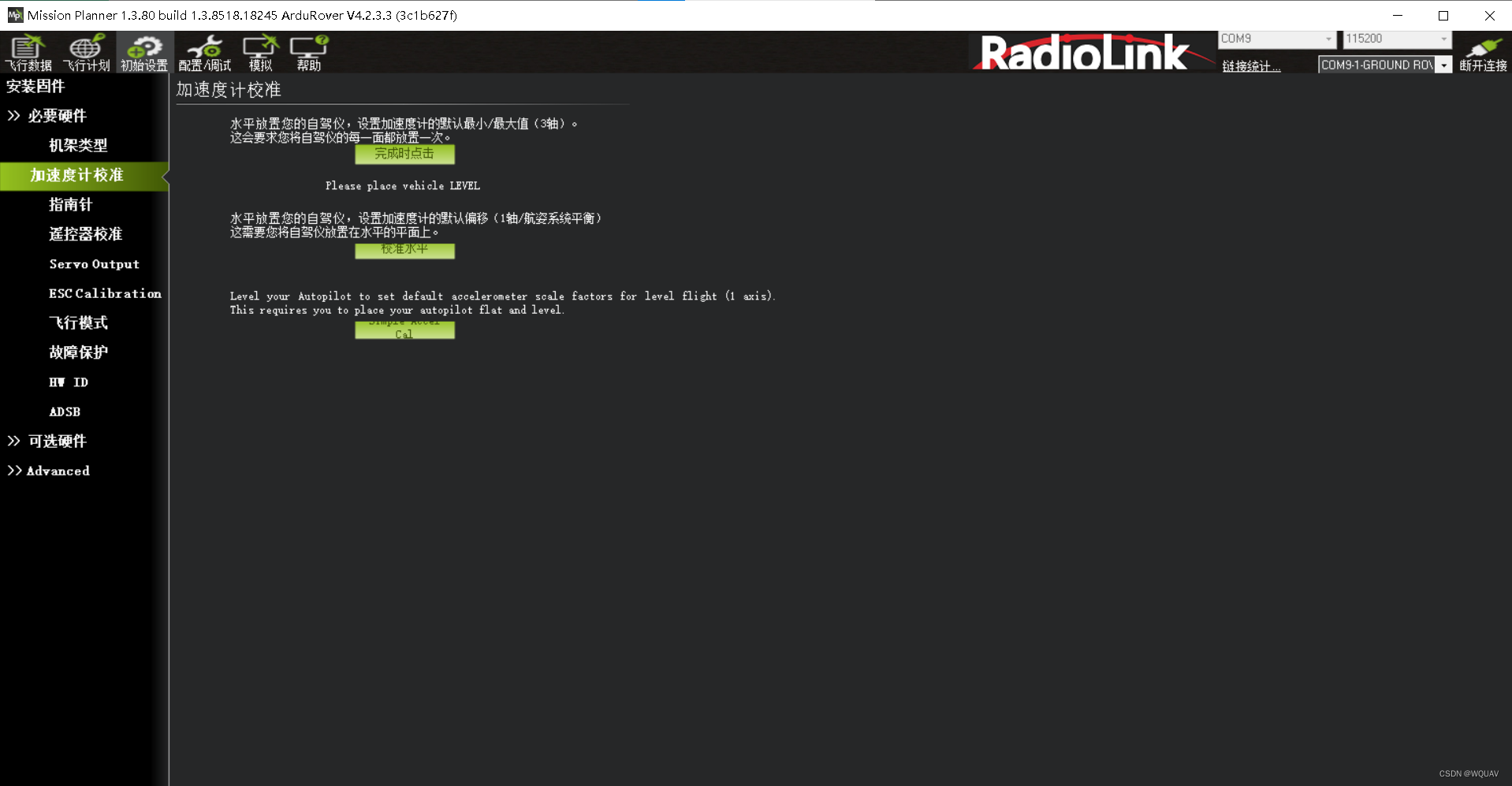
如果不出现提示,可能是没有插拔飞控板。需要在上一步后重新插拔连接。
上下前后左右全部校准一遍。
如果停滞,重新插拔。重启mission planner。死机的一种可能是联网操作软件后台发现更新包。
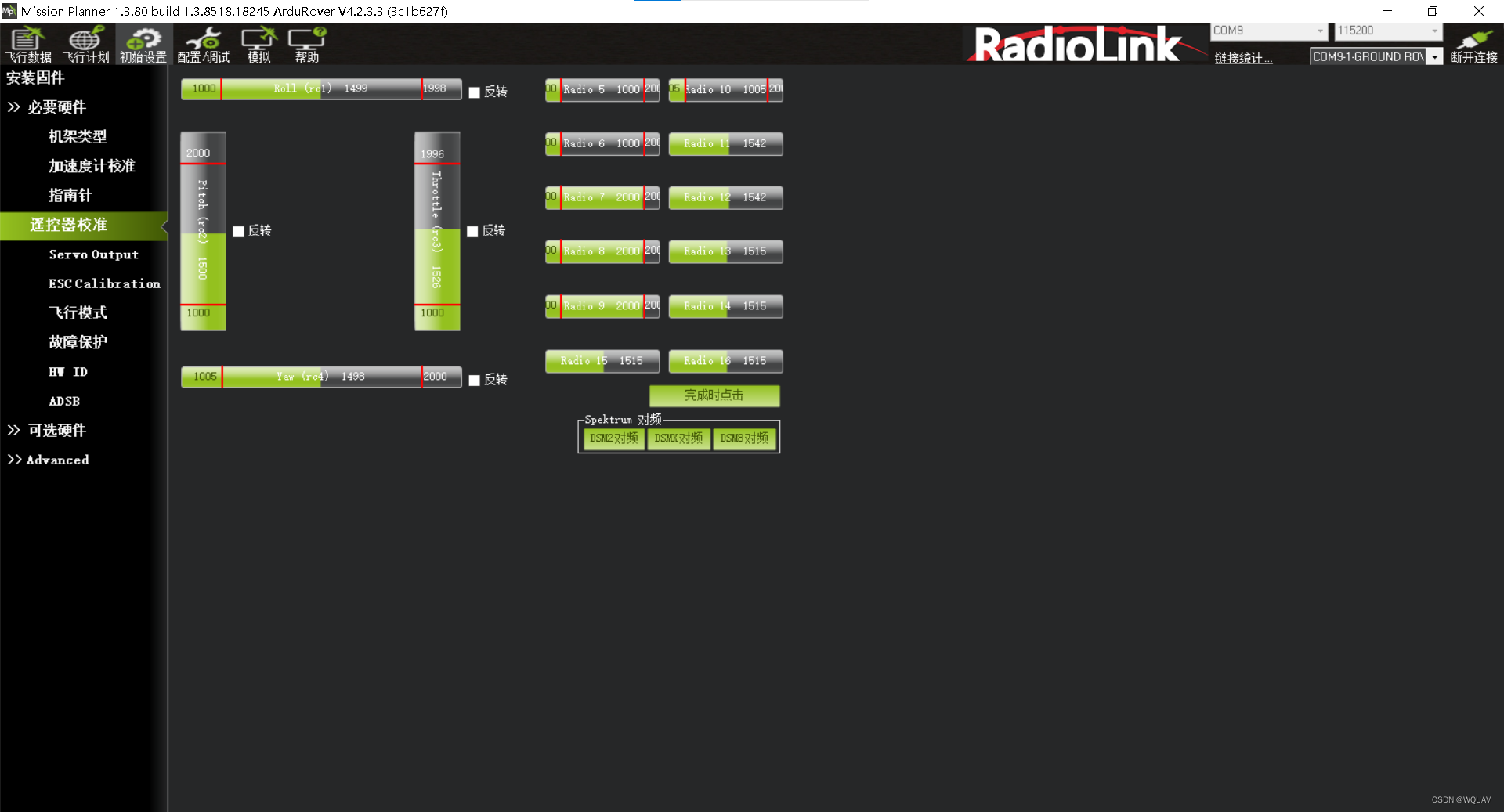
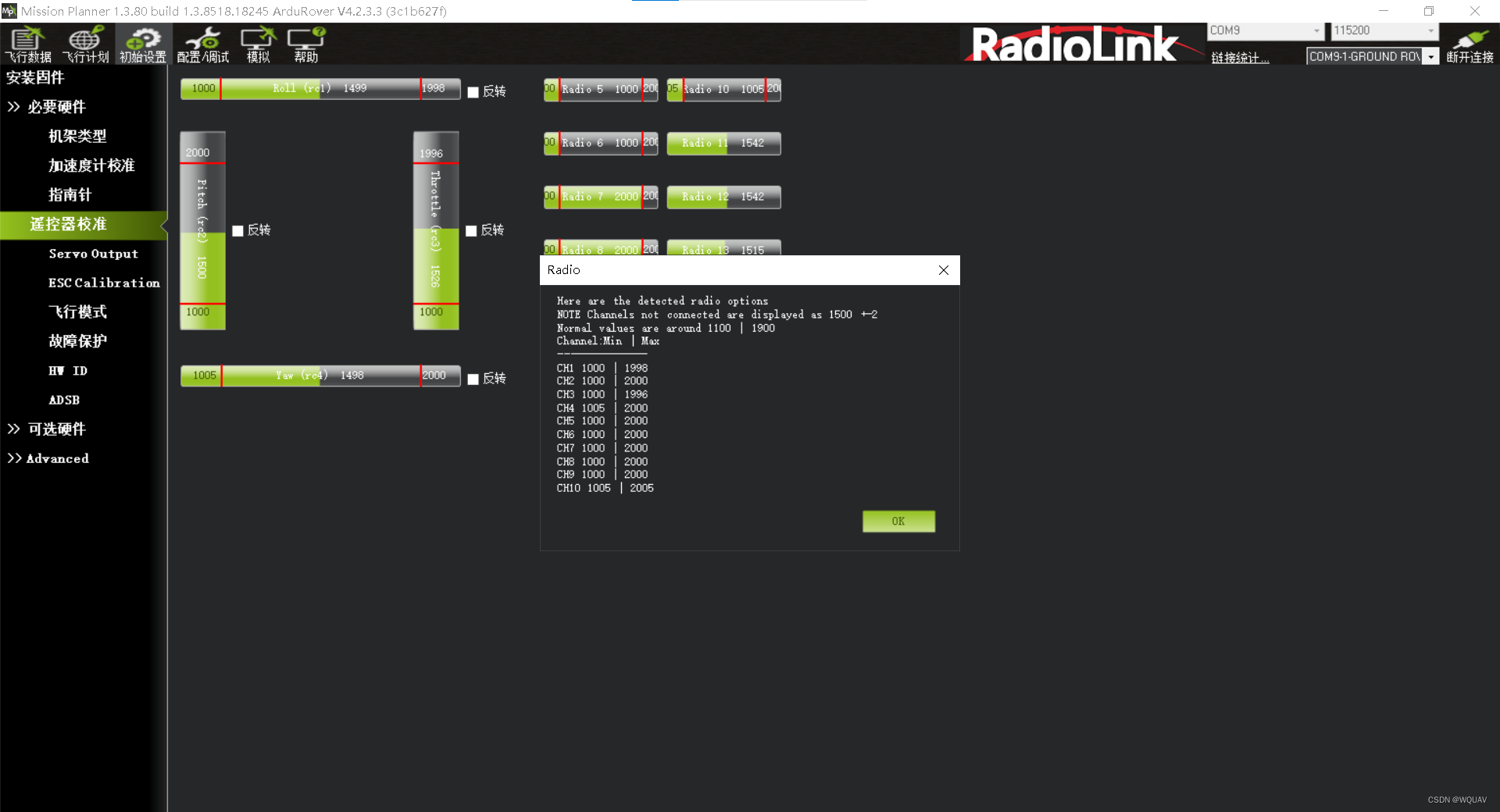
4.校准遥控器。
5.校准指南针。如果只有飞控,只能设置内置罗盘。
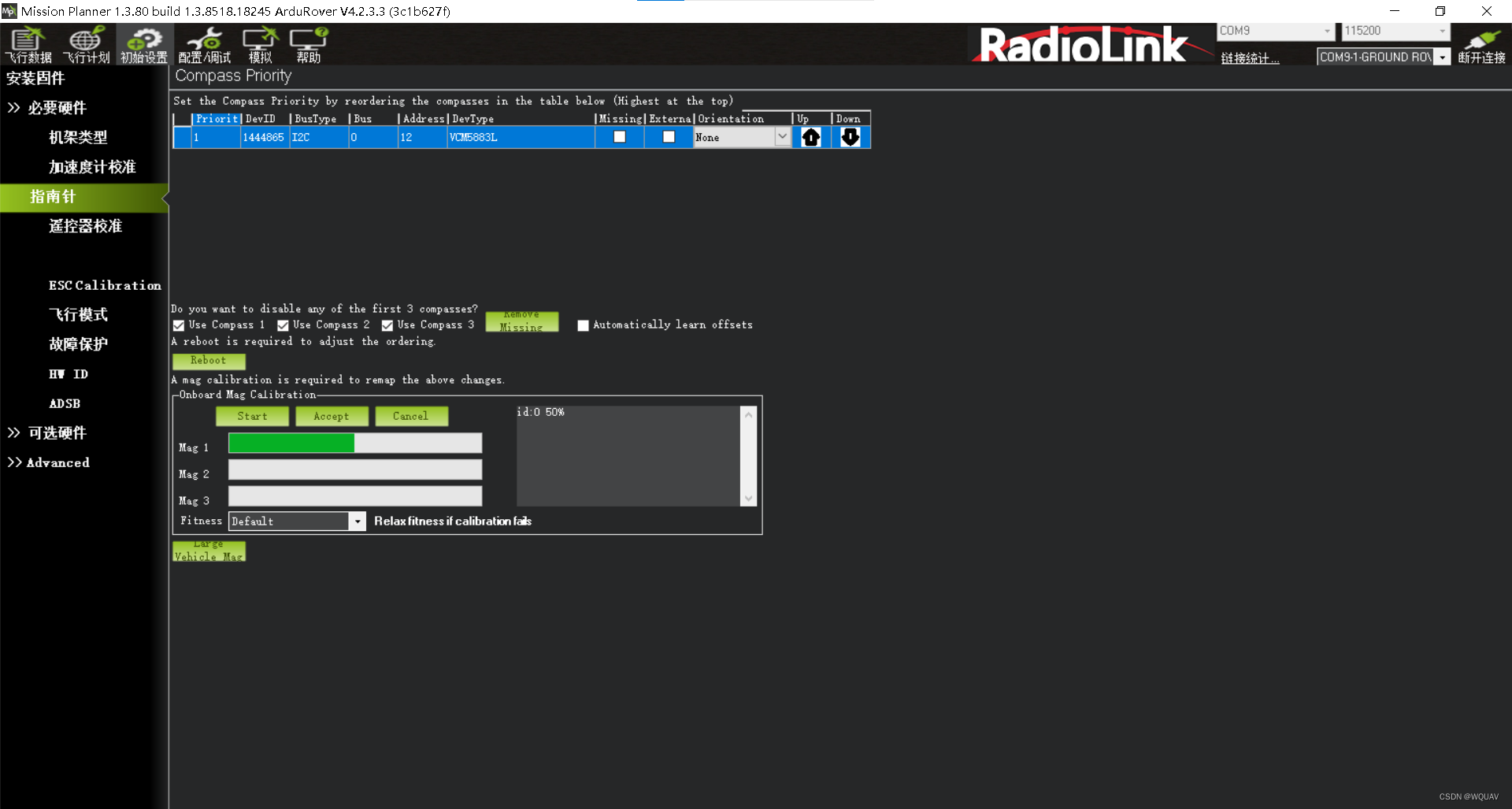
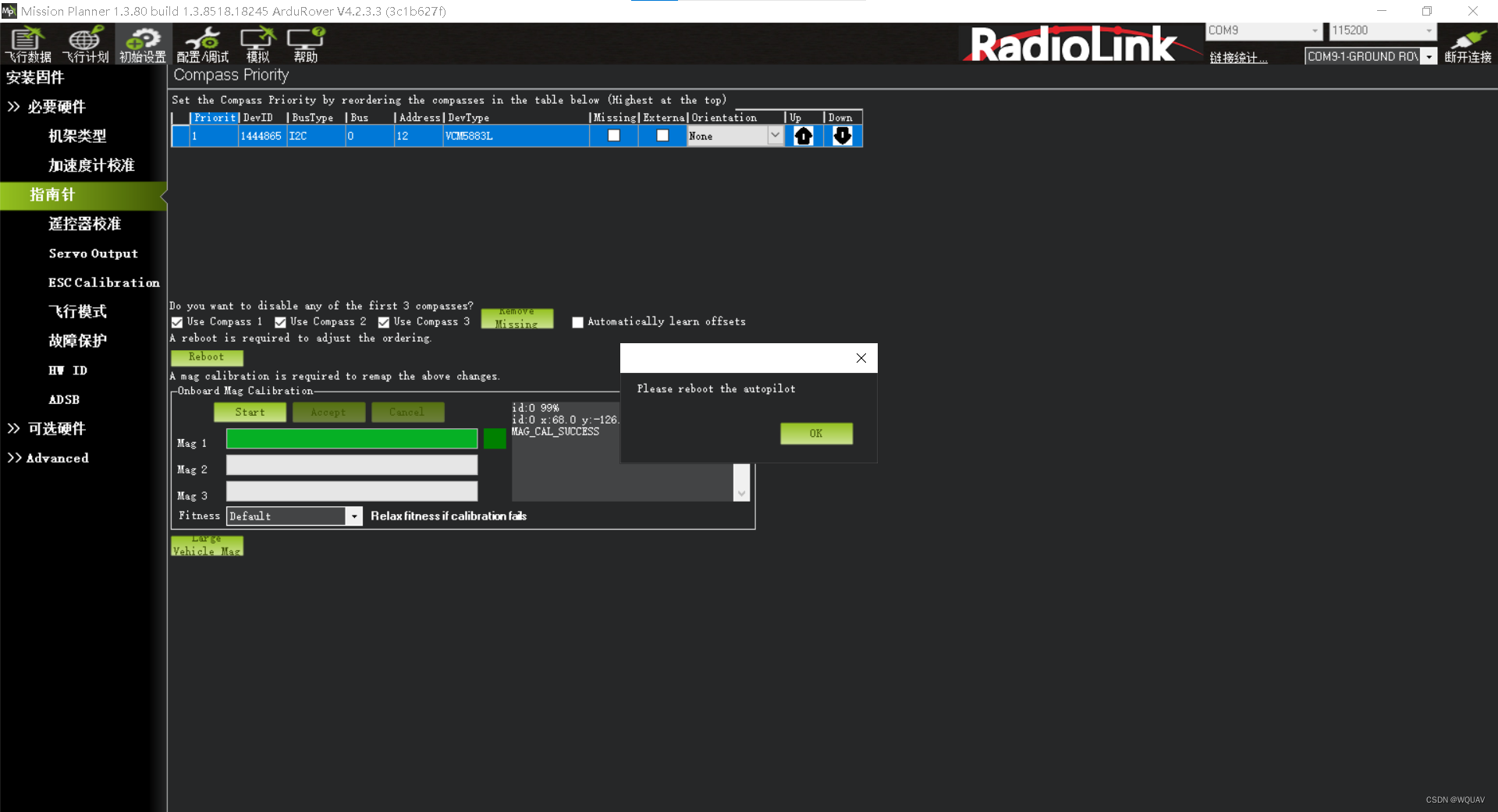
校准完毕重新插拔飞控。
6.遥控模式
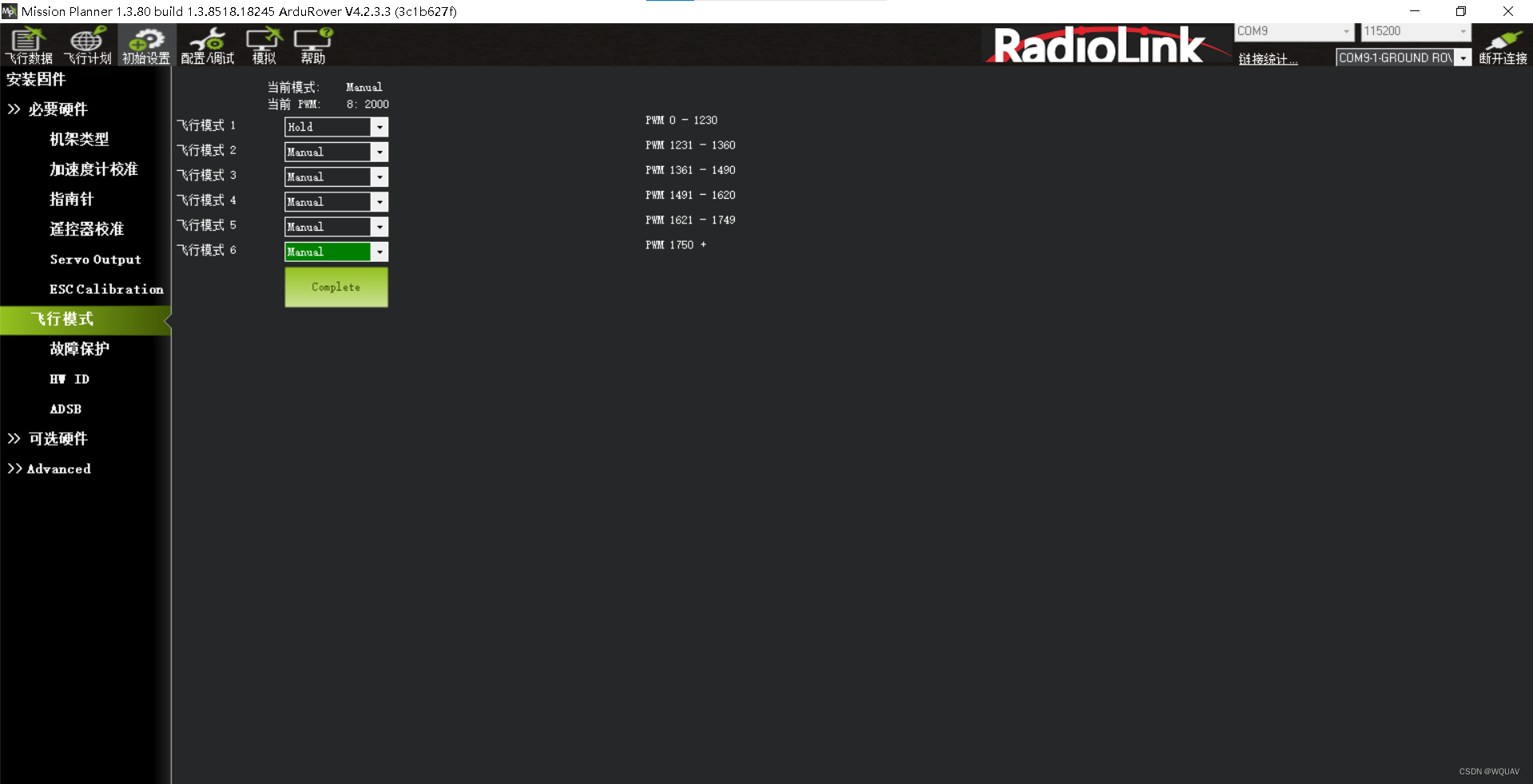
设置停机和手动模式。
4.失控保护
设置遥控器的失控保护
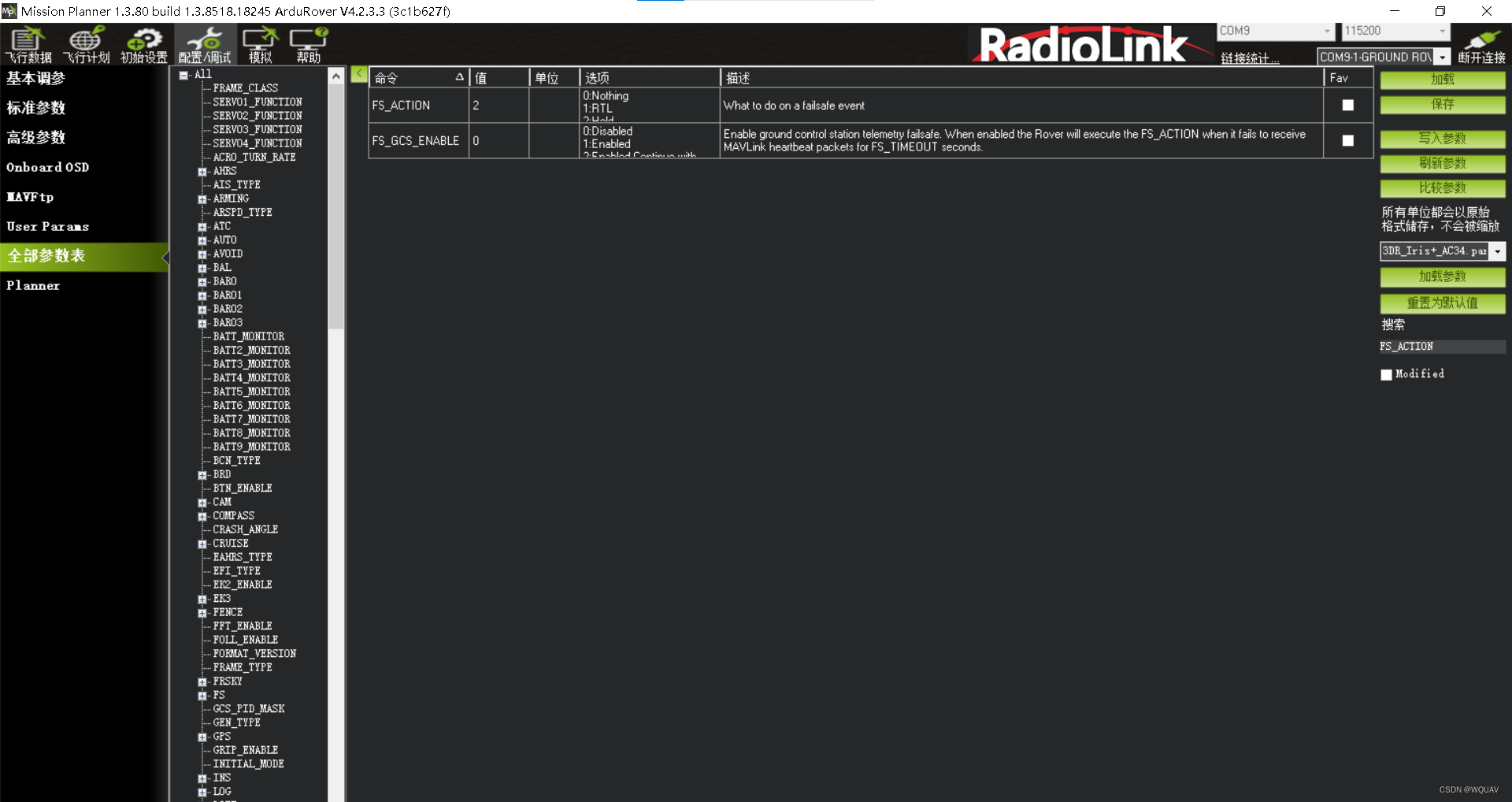
全部参数表,fs-action 值设置为停机模式。
5.解锁
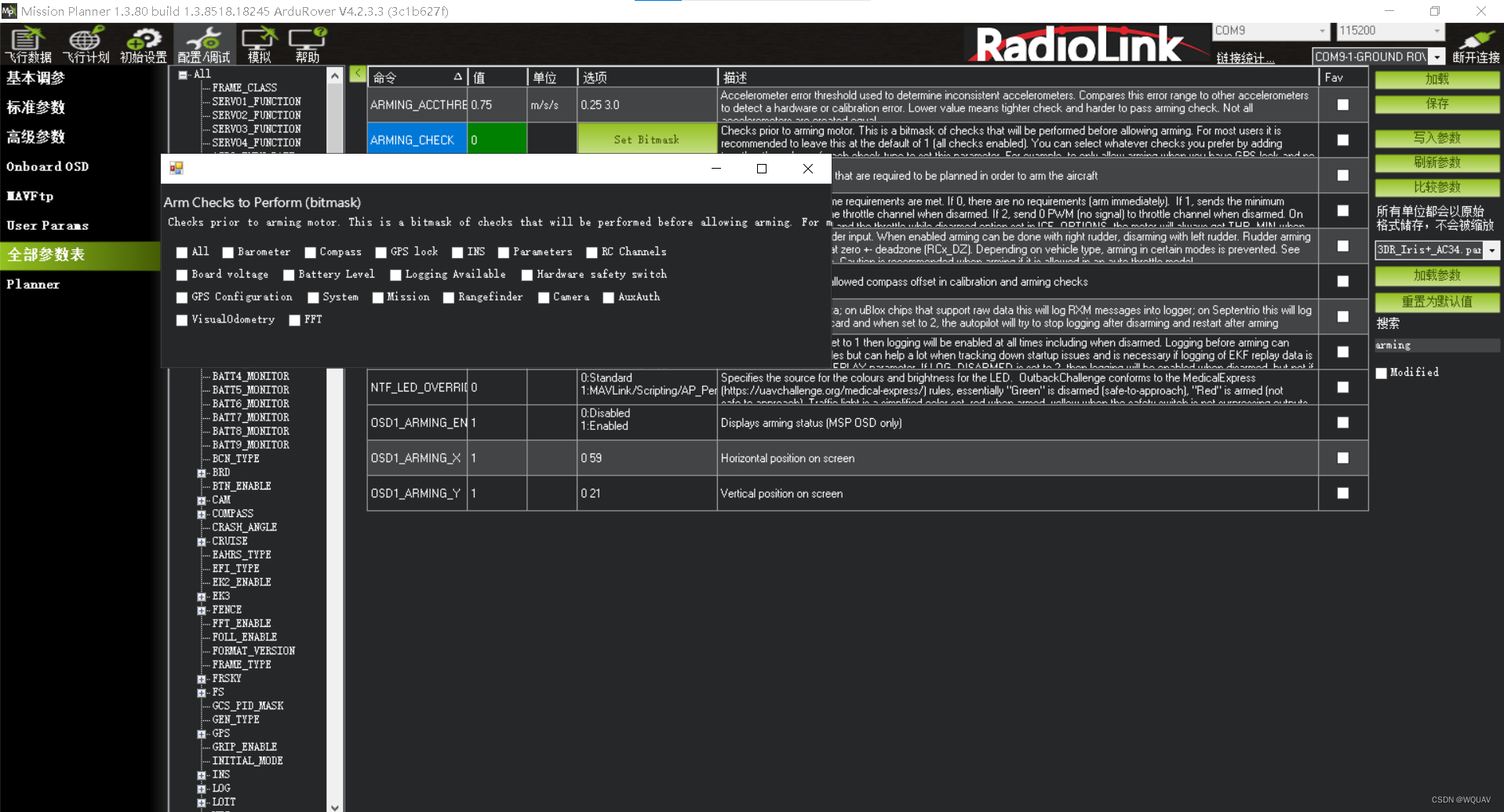 选择需要在解锁前需要检查的事项,默认为全部。可以手动修改,然后写入。
选择需要在解锁前需要检查的事项,默认为全部。可以手动修改,然后写入。
6.硬件连接
连线没有固定模式。美嘉欣的地盘默认为1通道为电机,2通道为舵机。3通道、4通道为风扇和灯光。
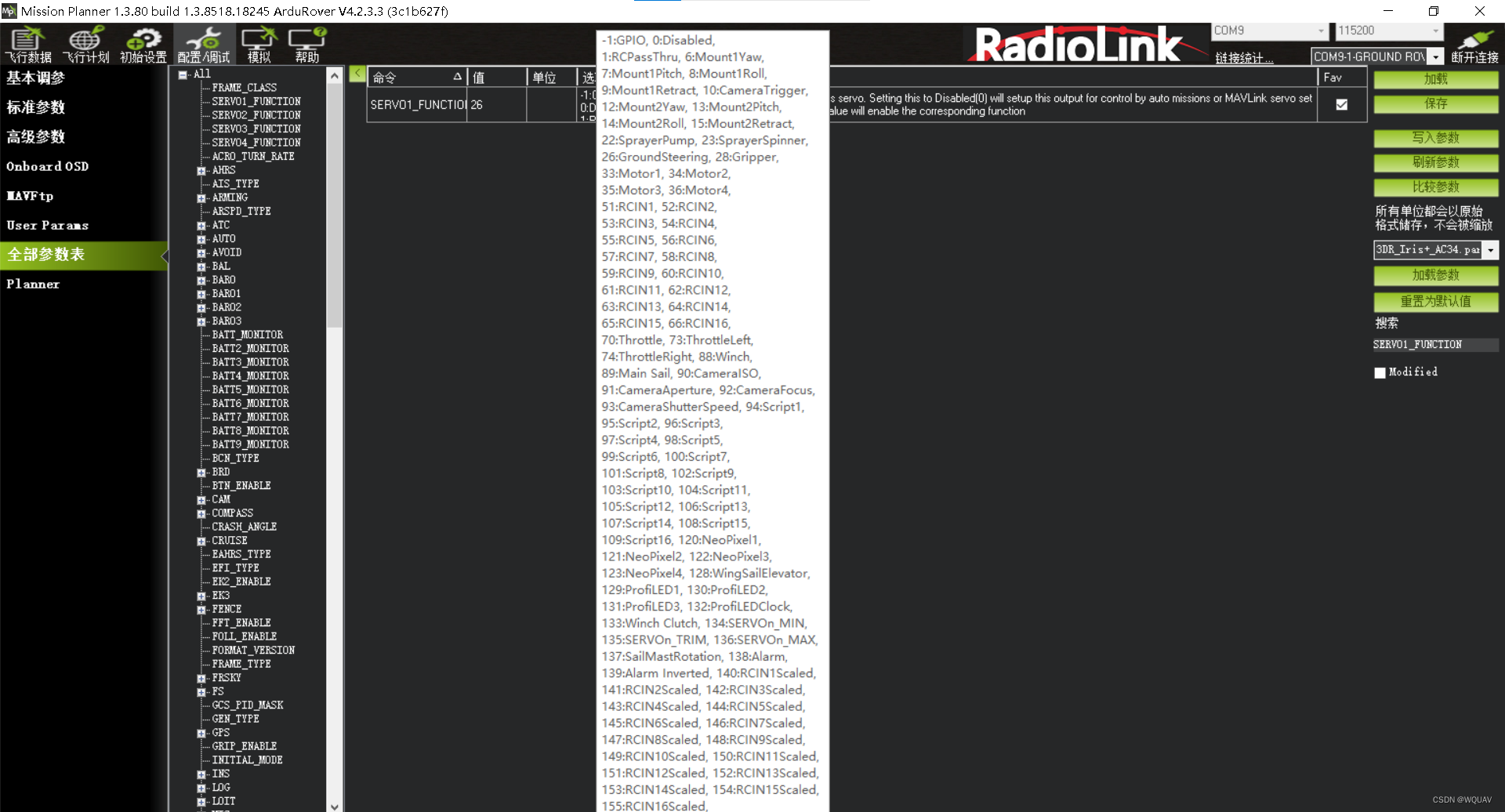
设置全部参数表,SERVO1_FUNCTION = 26(前轮转向)
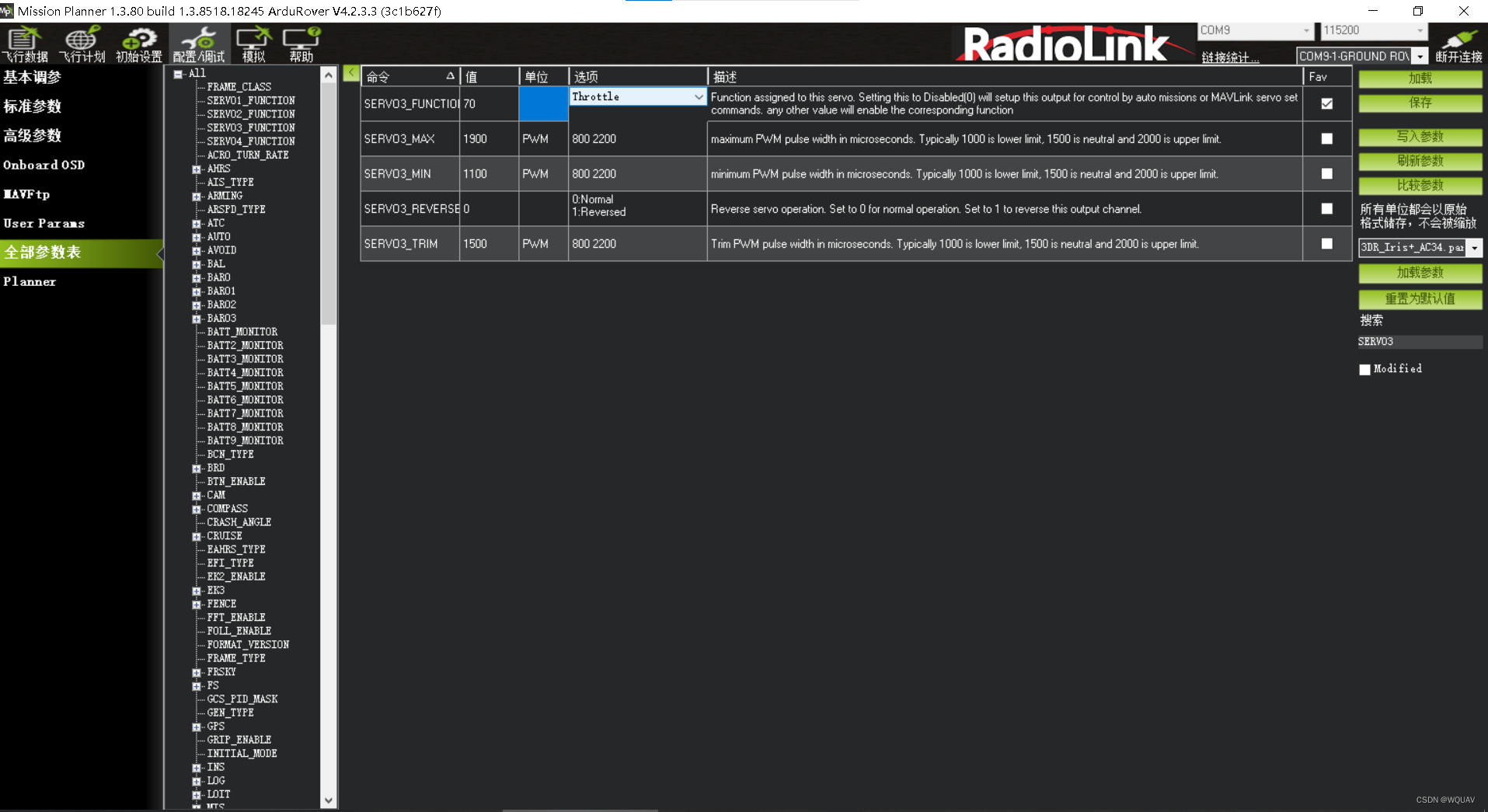
SERVO3_FUNCTION = 70(油门)
7.解锁
选择手动模式,油门杆推至中点,然后将横滚转向摇杆完全打向最右,然后保持 2 秒,当飞控蓝灯或者绿灯长亮,解锁成功,黄灯表示失败。
到底是什么原因,可以在首页查看报警日志。