1_控制系统总体结构
1、总体结构
控制系统结构图:
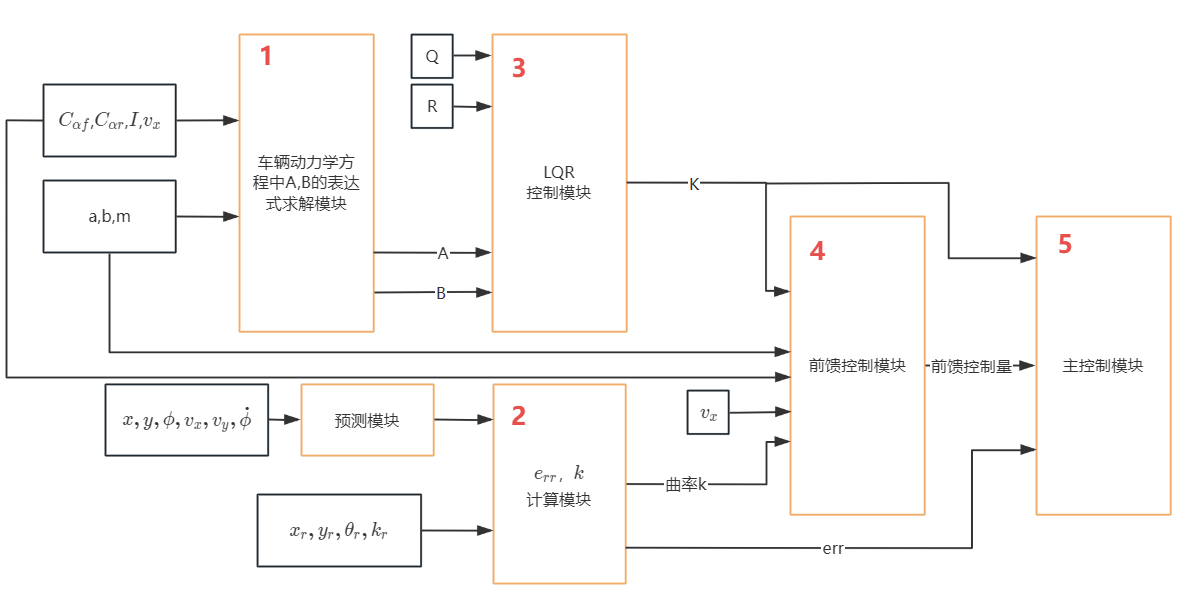
黑色块为参数、黄色块为计算模块
1.1 其中参数含义
- 车辆属性参数:
| 参数 | 含义 |
|---|---|
| C α f C_{\alpha f} Cαf | 自行车模型总轮胎侧偏刚度(前轮) |
| C α r C_{\alpha r} Cαr | 自行车模型总轮胎侧偏刚度(后轮) |
| I I I | yaw轴转动惯量 |
| a a a | 重心到前轴距离 |
| b b b | 重心到后轮距离 |
| m m m | 簧上质量+簧下质量 |
- 车辆状态参数:
| 参数 | 含义 |
|---|---|
| v x , v y v_x,v_y vx,vy | 横向,纵向速度 |
| x , y x,y x,y | 横纵坐标 |
| ϕ \phi ϕ | 车身横摆角 |
| θ r \theta_r θr | 投影点切线夹角 |
| k r k_r kr | 投影点位置曲线曲率 |
1.2 中间量含义
| 中间量 | 含义 |
|---|---|
| A,B | 是车辆动力学方程中,状态量和控制量的系数,由车辆属性参数和车速决定 |
| e r r e_{rr} err | 误差向量,包括横向、纵向、横摆角误差及其导数 |
| k k k | 实际就是 k r k_r kr |
| K K K | LQR的输出量:Ricati方程的解及A,B参数构成的一个系数矩阵 |