ExoPlayer架构详解与源码分析(10)——H264Reader
系列文章目录
ExoPlayer架构详解与源码分析(1)——前言
ExoPlayer架构详解与源码分析(2)——Player
ExoPlayer架构详解与源码分析(3)——Timeline
ExoPlayer架构详解与源码分析(4)——整体架构
ExoPlayer架构详解与源码分析(5)——MediaSource
ExoPlayer架构详解与源码分析(6)——MediaPeriod
ExoPlayer架构详解与源码分析(7)——SampleQueue
ExoPlayer架构详解与源码分析(8)——Loader
ExoPlayer架构详解与源码分析(9)——TsExtractor
ExoPlayer架构详解与源码分析(10)——H264Reader
文章目录
- 系列文章目录
- 前言
- H264结构
- H264Reader
- SPS的解析
- PPS的解析
- SEI的解析
- Slice的解析
- 总结
前言
TsExtractor解封完TS数据后,会根据payload中的视频类型使用指定Reader继续解析,如果payload是H.264格式,就会使用H264Reader来继续解析PES payload部分视频数据流。先上下ProgressiveMediaPeriod的万年老图:

这部分已经可以和SampQueue关联起来了,也就是说图中sampleData的地方就发生在H264Reader中。
H264结构
在看代码前老规矩,先简单了解下H264的码流结构
H264都是由一个个的NAL基本单元组成的,每个NAL由包含一个HEADER和一个DATA,如下图

这些基本的NAL可能为多种类型如上图的SPS,PPS,SLICE,这些类型就定义在NAL的Header之中,Header的结构很简单就一个字节,如下表
| 名称 | 大小(b) | 说明 |
|---|---|---|
| forbidden_zero_bit | 1 | 禁止位,占用NAL头的第一个位,当禁止位值为1时表示语法错误,告诉接收方丢掉该单元,否则为0 |
| nal_ref_idc | 2 | 指示当前NALU的优先级,或者说重要性,数值越大表明越重要 |
| nal_unit_type | 5 | 表示NALU的类型 |
那么nal_unit_type不同值对应什么类型呢看下表
| nal_unit_type | NAL类型 |
|---|---|
| 0 | 未使用 |
| 1 | 不分区、非 IDR 图像的片 |
| 2 | SLICE A 片分区 A |
| 3 | SLICE B 片分区 B |
| 4 | SLICE C 片分区 C |
| 5 | IDR 图像中的片 |
| 6 | Supplemental Enhancement Information(SEI ) 补充增强信息单元 |
| 7 | Sequence Paramater Set(SPS) 序列参数集 |
| 8 | Picture Paramater Set(PPS) 图像参数集 |
| 9 | Access Unit Delimiter(AUD) 分界符 |
| 10 | End Of Seq 序列结束 |
| 11 | End Of Stream 码流结束 |
| 12 | Filler Data 填充 |
| 13…23 | 保留 |
| 24…31 | 未使用 |
下面看下几个重要的unitType结构
-
Sequence Paramater Set(SPS) 序列参数集
SPS结构比较复杂这里挑几个用到的名称 大小(b) 说明 profile_idc 8 本视频编码时遵循的profile,profile分为Baseline,Main,Extended等,主要用来规定编码时是否采用某些特性,比如说Baseline profile就规定了只能使用I、P slice进行编码,关于profile的说明可以去查看标准的Annex A。 constraint_set0_flag 1 强制使用Baseline profile进行编码 constraint_set1_flag 1 强制使用Main profile进行编码 constraint_set2_flag 1 强制使用Extended profile进行编码 level_idc 8 本视频遵循的level,level主要规定了每秒最多能处理多少个宏块,最大的帧大小,最大的解码缓存,最大比特率等这些性能相关的东西,如果是硬解码,则比较容易出现由于视频level太高而不能解码的情况。 seq_parameter_set_id ue(v) 本SPS的ID,这个ID主要是给PPS用的 separate_colour_plane_flag 1 separate_colour_plane_flag 等于 1 表示对 4:4:4 色度格式中的三个色彩分量分别进行编码。 如果 separate_colour_plane_flag 的值为 0,则表示不对色彩成分进行单独编码,separate_colour_plane_flag 等于 1 时,主编码图像由三个独立的分量组成,每个分量由一个颜色平面(Y、Cb 或 Cr)的编码采样组成,每个采样使用单色编码语法。在这种情况下,每个色彩平面都与特定的 color_plane_id 值相关联 log2_max_frame_num_minus4 ue(v) 指定了变量 MaxFrameNum 的值,值范围应为 0 至 12(含 12), M a x F r a m e N u m = 2 ( l o g 2 m a x f r a m e n u m m i n u s 4 + 4 ) MaxFrameNum = 2^{(log2maxframenumminus4 +4)} MaxFrameNum=2(log2maxframenumminus4+4) pic_order_cnt_type ue(v) 指定解码图片顺序计数的方法,pic_order_cnt_type 的值范围应为 0 至 2(含 2) pic_width_in_mbs_minus1 ue(v) 图片宽度 pic_height_in_map_units_minus1 ue(v) 图片高度 frame_mbs_only_flag 1 是否只进行帧编码 vui_parameters_present_flag 1 SPS是否包含vui参数, video usability information,在标准的Annex E中有描述,主要包含了视频的比例调整,overscan,视频格式,timing,比特率等信息 aspect_ratio_info_present_flag 1 等于 1 表示存在 aspect_ratio_idc,等于 0 表示不存在 aspect_ratio_idc aspect_ratio_idc 8 指定样本的采样纵横比值。当 aspect_ratio_idc 表示 Extended_SAR(扩展 SAR)时,采样纵横比用 sar_width : sar_height 表示,当没有 aspect_ratio_idc 语法元素时,aspect_ratio_idc 值为 0 sar_width 16 表示样本纵横比的水平尺寸 sar_height 16 表示样本纵横比的垂直尺寸(单位与 sar_width 相同) ue(v)、se(v)表示以哥伦布编码的一种变长压缩算法
-
Picture Paramater Set(PPS) 图像参数集
这里也挑几个用到的讲下名称 大小(b) 说明 pic_parameter_set_id ue(v) 当前PPS的ID,供slice RBSP使用 seq_parameter_set_id ue(v) 当前PPS所属的SPS的ID bottom_field_pic_order_in_frame_present_flag 1 用于POC计算,请参考h.264的POC计算中的bottom_field_flag -
Supplemental Enhancement Information(SEI ) 补充增强信息单元
集成在音视频码流中,用于在音视频内部传递消息,可以保证信息与直播音视频数据的同步,SEI并不是解码过程的必须项,有可能对解码过程(容错、纠错)有帮助,视频传输过程、解封装、解码环节,都可能因为某种原因丢弃SEI ,在视频内容的生成端、传输过程中,都可以插入SEI 信息。插入的信息,和其他视频内容一起经过传输链路到达了消费端。那么在SEI 中可以添加哪些信息呢?传递编码器参数、传递视频版权信息、传递摄像头参数、当然也可以传输字幕信息,后面我们会看到。 -
Slice
视频中的一帧图像可以理解成由一个或多个Slice组成,每一个Slice总体来看都由两部分组成-
Slice header,包含着分片类型、分片中的宏块类型、分片帧的数量以及对应的帧的设置和参数等信息,slice body中的宏块在进行解码时需依赖这些信息
来看下Header 的结构名称 大小(b) 说明 first_mb_in_slice ue(v) 当前slice中包含的第一个宏块在整帧中的位置 slice_type ue(v) 当前slice的类型参照下表 pic_parameter_set_id ue(v) 当前slice所依赖的pps的id;范围 0 到 255 colour_plane_id 2 当标识位separate_colour_plane_flag为true时,colour_plane_id表示当前的颜色分量,0、1、2分别表示Y、U、V分量 frame_num ue(v) 表示当前帧序号,数据长度参考上面的log2_max_frame_num_minus4 field_pic_flag 1 场编码标识位。当该标识位为1时表示当前slice按照场进行编码;该标识位为0时表示当前 slice按照帧进行编码 bottom_field_flag 1 底场标识位。该标志位为1表示当前slice是某一帧的底场;为0表示当前slice为某一帧的顶场 idr_pic_id ue(v) 表示IDR帧的序号。某一个IDR帧所属的所有slice,其idr_pic_id应保持一致。该值的取值范围为[0,65535]。 pic_order_cnt_lsb ue(v) 表示当前帧序号的另一种计量方式 delta_pic_order_cnt_bottom se(v) 表示顶场与底场POC差值的计算方法,不存在则默认为0 delta_pic_order_cnt[0] se(v) 指定编码帧顶部字段的图片顺序计数与预期图片顺序计数的差值 delta_pic_order_cnt[1] se(v) 指定图像顺序计数与编码帧底层字段的预期图像顺序计数的差值 slice_type Name of slice_type 0 P (P slice) 1 B (B slice) 2 I (I slice) 3 SP (SP slice) 4 SI (SI slice) 5 P (P slice) 6 B (B slice) 7 I (I slice) 8 SP (SP slice) 9 SI (SI slice) -
Slice body,通常是一组连续的宏块结构(参照上图),这里就是最终存储像素数据的地方了。宏块中还包含了宏块类型、预测类型、Coded Block Pattern、Quantization Parameter、像素的亮度和色度数据集等等信息。具体结构这个里不是重点不展开。
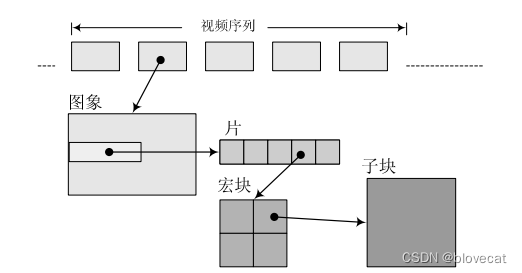
一个视频由多个帧组成,一帧由多个Slice(片)组成,一个Slice由多个宏块组成,一个宏块又由多个(如4X4)的YUV像素数据组成。
-
看完了这些SPS、PPS、SLICE他们之间关系是怎么样的呢
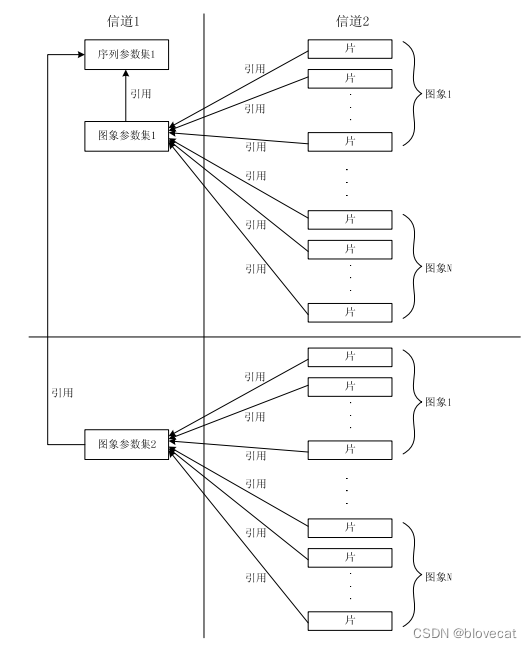
Slice里的pic_parameter_set_id指向了PPS里的pic_parameter_set_id,而PPS里的seq_parameter_set_id又指向了SPS(序列参数集)里的seq_parameter_set_id,这样一个SPS关联多个PPS,而一个PPS又关联了多个Slice;解码器解码Slice时就通过这些ID查询相关的PPS、SPS获取解码所需的必要信息。
在网络传输流的过程中编码器可能会将每个NAL单元放入到单个独立的网络传输块中,如TS中可能一个包中之包含一个NAL,解码器可以很容易的检测出NAL的分界,然后依次取出NAL来解码,但是实际可能一个包里会包含一个PES头这个头后面跟随了多个NAL单元这种情况该如何找到这些NAL单元的分界呢?
很简单,给NAL前添加0x000001头3个字节,某些情况下会要求NAL长度对齐不足的部分填充0,所以H.264规定当检测到0x000000这3个字节的时候也表示当前NAL结束,这样感觉已经可以解决分界问题了。
但是如果NAL内部数据出现0x000001或者0x000000字段怎么办呢,解码器会误以为这里是新的NAL的开始,导致数据解码出错,于是H.264规定了另一个规则 emulation prevention,在编码器编码完一个NAL时,会再去检测当前NAL中是否包含上述2种字节序列,如果检测出则在最后一个字节前插入一个新字节0x03,当解码器在NAL内部检测到有0x000003 字节序列时,就会把0x03丢弃,恢复数据。
如0x000001 最后一个字节添加0x03 变成0x00000301,解码器丢弃后又变成0x000001。
源码里的ParsableNalUnitBitArray 和NalUnitUtil.unescapeStream方法就是用来丢弃0x03的。
H264Reader
了解了上面的知识,基本就可以开始看代码实现了,这部分最好联系上文ExoPlayer架构详解与源码分析(7)——SampleQueue一起看。
@Override
public void consume(ParsableByteArray data) {
assertTracksCreated();
int offset = data.getPosition();
int limit = data.limit();
byte[] dataArray = data.getData();
// 将当前数据长度计入总长度,此时总数据的尾部和当前数据的尾部就是对齐的
totalBytesWritten += data.bytesLeft();
//到这里已经是解复用后的数据了,将数据发给SampleQueue
output.sampleData(data, data.bytesLeft());
// 循环读取到NAL单元结束
while (true) {
//通过判断是否为0x000001 3字节,确定NAL开始位置,prefixFlags用于保存上一次循环里的3字节信息,防止目标字节被循环分割
int nalUnitOffset = NalUnitUtil.findNalUnit(dataArray, offset, limit, prefixFlags);
if (nalUnitOffset == limit) {
// 读取到最后一个字节,循环结束
nalUnitData(dataArray, offset, limit);
return;
}
// 知道起始位置后,获取第四个字节后5位就是NAL的类型
int nalUnitType = NalUnitUtil.getNalUnitType(dataArray, nalUnitOffset);
//获取NAL开始位置到当前位置的偏移量,当NAL单元开始位置在上一段数据中时,这个值为负值
int lengthToNalUnit = nalUnitOffset - offset;
if (lengthToNalUnit > 0) {
//将当前位置到下一个NAL开始位置的数据输入
nalUnitData(dataArray, offset, nalUnitOffset);
}
//用当前数据的结束位置-相对于当前数据的NAL开始位置,得到就是当前NAL开始位置到当前数据的结束距离
int bytesWrittenPastPosition = limit - nalUnitOffset;
//由于当前的结束位置和整个的结束位置是对齐的,用整个数据的长度减轻到结尾的距离,就是这个NAL相对于整个数据的绝对位置
long absolutePosition = totalBytesWritten - bytesWrittenPastPosition;
// 如果到下一个单元开始的长度为负,那么我们向 NAL 缓冲区写入了过多字节。当通知NAL结束时丢弃多余的字节。
endNalUnit(
absolutePosition,
bytesWrittenPastPosition,
lengthToNalUnit < 0 ? -lengthToNalUnit : 0,
pesTimeUs);
// 下个NAL单元开始
startNalUnit(absolutePosition, nalUnitType, pesTimeUs);
// 从NAL单元开始位置读取3个字节
offset = nalUnitOffset + 3;
}
}
//结束NAL单元
private void endNalUnit(long position, int offset, int discardPadding, long pesTimeUs) {
if (!hasOutputFormat || sampleReader.needsSpsPps()) {
sps.endNalUnit(discardPadding);
pps.endNalUnit(discardPadding);
if (!hasOutputFormat) {//保证只执行一次
if (sps.isCompleted() && pps.isCompleted()) {//sps和pps都已经endNalUnit
List<byte[]> initializationData = new ArrayList<>();
initializationData.add(Arrays.copyOf(sps.nalData, sps.nalLength));
initializationData.add(Arrays.copyOf(pps.nalData, pps.nalLength));
//解析出SPS数据
NalUnitUtil.SpsData spsData = NalUnitUtil.parseSpsNalUnit(sps.nalData, 3, sps.nalLength);
//解析出PPS数据
NalUnitUtil.PpsData ppsData = NalUnitUtil.parsePpsNalUnit(pps.nalData, 3, pps.nalLength);
//构建codecs 参数,最终用于 MediaCodec 的 configure,确定解码器
String codecs =
CodecSpecificDataUtil.buildAvcCodecString(
spsData.profileIdc,
spsData.constraintsFlagsAndReservedZero2Bits,
spsData.levelIdc);
//通过SPS和PPS构建Format输出给SampleQueue
output.format(
new Format.Builder()
.setId(formatId)
.setSampleMimeType(MimeTypes.VIDEO_H264)
.setCodecs(codecs)
.setWidth(spsData.width)
.setHeight(spsData.height)
.setPixelWidthHeightRatio(spsData.pixelWidthHeightRatio)
.setInitializationData(initializationData)
.build());
hasOutputFormat = true;
sampleReader.putSps(spsData);
sampleReader.putPps(ppsData);
sps.reset();
pps.reset();
}
} else if (sps.isCompleted()) {
NalUnitUtil.SpsData spsData = NalUnitUtil.parseSpsNalUnit(sps.nalData, 3, sps.nalLength);
sampleReader.putSps(spsData);
sps.reset();
} else if (pps.isCompleted()) {
NalUnitUtil.PpsData ppsData = NalUnitUtil.parsePpsNalUnit(pps.nalData, 3, pps.nalLength);
sampleReader.putPps(ppsData);
pps.reset();
}
}
if (sei.endNalUnit(discardPadding)) {
//丢弃0x03字节
int unescapedLength = NalUnitUtil.unescapeStream(sei.nalData, sei.nalLength);
seiWrapper.reset(sei.nalData, unescapedLength);
seiWrapper.setPosition(4); // NAL prefix and nal_unit() header.
//解析SEI,解析这部分主演是防止SEI中包含字幕信息,将SEI中的字幕轨道提取出来
seiReader.consume(pesTimeUs, seiWrapper);
}
boolean sampleIsKeyFrame =
sampleReader.endNalUnit(position, offset, hasOutputFormat, randomAccessIndicator);
if (sampleIsKeyFrame) {
//这要么是 IDR 帧,要么是自随机访问指示符以来的第一个 I 帧,因此将其标记为关键帧。清除该标志,以便后续的非 IDR I 帧不会被标记为关键帧,直到我们看到另一个随机访问指示符。
randomAccessIndicator = false;
}
}
//sampleReader.endNalUnit
public boolean endNalUnit(
long position, int offset, boolean hasOutputFormat, boolean randomAccessIndicator) {
if (nalUnitType == NalUnitUtil.NAL_UNIT_TYPE_AUD//遇到一个AUD就sample一次Metadata
|| (detectAccessUnits && sliceHeader.isFirstVclNalUnitOfPicture(previousSliceHeader))) {
// If the NAL unit ending is the start of a new sample, output the previous one.
if (hasOutputFormat && readingSample) {//Fromat未解析出也就是SPS PPS未解析完成,跳过
//position为当前AUD结束位置,nalUnitLength 就是AUD长度,一般都是5
int nalUnitLength = (int) (position - nalUnitStartPosition);
//这里的offset 为当前AUD结尾到sampleData结尾的距离
//offset +nalUnitLength后相当于AUD开始位置到sampleData结尾的距离,相当于当前Metadata 结束位置到SampleData结尾的距离
outputSample(offset + nalUnitLength);
}
samplePosition = nalUnitStartPosition;//标记当前Metadata 开始位置
sampleTimeUs = nalUnitTimeUs;//标记当前Metadata 开始时间
sampleIsKeyframe = false;
readingSample = true;//标记当前Metadata 开始
}
boolean treatIFrameAsKeyframe =
allowNonIdrKeyframes ? sliceHeader.isISlice() : randomAccessIndicator;
sampleIsKeyframe |=
nalUnitType == NalUnitUtil.NAL_UNIT_TYPE_IDR
|| (treatIFrameAsKeyframe && nalUnitType == NalUnitUtil.NAL_UNIT_TYPE_NON_IDR);
return sampleIsKeyframe;
}
private void outputSample(int offset) {
if (sampleTimeUs == C.TIME_UNSET) {
return;
}
@C.BufferFlags int flags = sampleIsKeyframe ? C.BUFFER_FLAG_KEY_FRAME : 0;
//计算当前Metadata 的有效长度,从第一个AUD开始到下一个AUD的开始位置长度
int size = (int) (nalUnitStartPosition - samplePosition);
//将Metadata Sample,计算Metadata 在SampleData中起始位置时,就可以用SampleData总长度-Metadata 的长度-Metadata 结束位置到SampleData结尾的距离
output.sampleMetadata(sampleTimeUs, flags, size, offset, null);
}
SPS的解析
public static SpsData parseSpsNalUnitPayload(byte[] nalData, int nalOffset, int nalLimit) {
ParsableNalUnitBitArray data = new ParsableNalUnitBitArray(nalData, nalOffset, nalLimit);
int profileIdc = data.readBits(8);//获取profileIdc 主要用于Codec的构建
int constraintsFlagsAndReservedZero2Bits = data.readBits(8);//获取后面几个Flag主要用于Codec的构建
int levelIdc = data.readBits(8);//获取levelIdc 主要用于Codec的构建
int seqParameterSetId = data.readUnsignedExpGolombCodedInt();//获取SPS的ID
int chromaFormatIdc = 1; // Default is 4:2:0
boolean separateColorPlaneFlag = false;
if (profileIdc == 100
|| profileIdc == 110
|| profileIdc == 122
|| profileIdc == 244
|| profileIdc == 44
|| profileIdc == 83
|| profileIdc == 86
|| profileIdc == 118
|| profileIdc == 128
|| profileIdc == 138) {
chromaFormatIdc = data.readUnsignedExpGolombCodedInt();
if (chromaFormatIdc == 3) {
separateColorPlaneFlag = data.readBit();//获取separate_colour_plane_flag
}
data.readUnsignedExpGolombCodedInt(); // bit_depth_luma_minus8
data.readUnsignedExpGolombCodedInt(); // bit_depth_chroma_minus8
data.skipBit(); // qpprime_y_zero_transform_bypass_flag
boolean seqScalingMatrixPresentFlag = data.readBit();
if (seqScalingMatrixPresentFlag) {
int limit = (chromaFormatIdc != 3) ? 8 : 12;
for (int i = 0; i < limit; i++) {
boolean seqScalingListPresentFlag = data.readBit();
if (seqScalingListPresentFlag) {
skipScalingList(data, i < 6 ? 16 : 64);
}
}
}
}
int frameNumLength = data.readUnsignedExpGolombCodedInt() + 4; // log2_max_frame_num_minus4 + 4
int picOrderCntType = data.readUnsignedExpGolombCodedInt();//pic_order_cnt_type
int picOrderCntLsbLength = 0;
boolean deltaPicOrderAlwaysZeroFlag = false;
if (picOrderCntType == 0) {
// log2_max_pic_order_cnt_lsb_minus4 + 4
picOrderCntLsbLength = data.readUnsignedExpGolombCodedInt() + 4;
} else if (picOrderCntType == 1) {
deltaPicOrderAlwaysZeroFlag = data.readBit(); // delta_pic_order_always_zero_flag
data.readSignedExpGolombCodedInt(); // offset_for_non_ref_pic
data.readSignedExpGolombCodedInt(); // offset_for_top_to_bottom_field
long numRefFramesInPicOrderCntCycle = data.readUnsignedExpGolombCodedInt();
for (int i = 0; i < numRefFramesInPicOrderCntCycle; i++) {
data.readUnsignedExpGolombCodedInt(); // offset_for_ref_frame[i]
}
}
int maxNumRefFrames = data.readUnsignedExpGolombCodedInt(); // max_num_ref_frames
data.skipBit(); // gaps_in_frame_num_value_allowed_flag
int picWidthInMbs = data.readUnsignedExpGolombCodedInt() + 1;//pic_width_in_mbs_minus1
int picHeightInMapUnits = data.readUnsignedExpGolombCodedInt() + 1;//pic_height_in_map_units_minus1
boolean frameMbsOnlyFlag = data.readBit();//frame_mbs_only_flag
int frameHeightInMbs = (2 - (frameMbsOnlyFlag ? 1 : 0)) * picHeightInMapUnits;
if (!frameMbsOnlyFlag) {
data.skipBit(); // mb_adaptive_frame_field_flag
}
data.skipBit(); // direct_8x8_inference_flag
//下面确定视频帧的高宽
int frameWidth = picWidthInMbs * 16;
int frameHeight = frameHeightInMbs * 16;
boolean frameCroppingFlag = data.readBit();
if (frameCroppingFlag) {//获取裁剪后的高宽
int frameCropLeftOffset = data.readUnsignedExpGolombCodedInt();
int frameCropRightOffset = data.readUnsignedExpGolombCodedInt();
int frameCropTopOffset = data.readUnsignedExpGolombCodedInt();
int frameCropBottomOffset = data.readUnsignedExpGolombCodedInt();
int cropUnitX;
int cropUnitY;
if (chromaFormatIdc == 0) {
cropUnitX = 1;
cropUnitY = 2 - (frameMbsOnlyFlag ? 1 : 0);
} else {
int subWidthC = (chromaFormatIdc == 3) ? 1 : 2;
int subHeightC = (chromaFormatIdc == 1) ? 2 : 1;
cropUnitX = subWidthC;
cropUnitY = subHeightC * (2 - (frameMbsOnlyFlag ? 1 : 0));
}
frameWidth -= (frameCropLeftOffset + frameCropRightOffset) * cropUnitX;
frameHeight -= (frameCropTopOffset + frameCropBottomOffset) * cropUnitY;
}
@C.ColorSpace int colorSpace = Format.NO_VALUE;
@C.ColorRange int colorRange = Format.NO_VALUE;
@C.ColorTransfer int colorTransfer = Format.NO_VALUE;
//确定宽高比
float pixelWidthHeightRatio = 1;
boolean vuiParametersPresentFlag = data.readBit();
if (vuiParametersPresentFlag) {//vui_parameters_present_flag包含VUI数据
boolean aspectRatioInfoPresentFlag = data.readBit();
if (aspectRatioInfoPresentFlag) {//aspect_ratio_info_present_flag
int aspectRatioIdc = data.readBits(8);//aspect_ratio_idc
if (aspectRatioIdc == NalUnitUtil.EXTENDED_SAR) {//自定义了宽高比
int sarWidth = data.readBits(16);//sar_width
int sarHeight = data.readBits(16);//sar_height
if (sarWidth != 0 && sarHeight != 0) {
pixelWidthHeightRatio = (float) sarWidth / sarHeight;
}
} else if (aspectRatioIdc < NalUnitUtil.ASPECT_RATIO_IDC_VALUES.length) {//无自定义获取已定义的宽高比
pixelWidthHeightRatio = NalUnitUtil.ASPECT_RATIO_IDC_VALUES[aspectRatioIdc];
} else {
Log.w(TAG, "Unexpected aspect_ratio_idc value: " + aspectRatioIdc);
}
}
if (data.readBit()) { // overscan_info_present_flag
data.skipBit(); // overscan_appropriate_flag
}
if (data.readBit()) { // video_signal_type_present_flag
data.skipBits(3); // video_format
colorRange =
data.readBit() ? C.COLOR_RANGE_FULL : C.COLOR_RANGE_LIMITED; // video_full_range_flag
if (data.readBit()) { // colour_description_present_flag
int colorPrimaries = data.readBits(8); // colour_primaries
int transferCharacteristics = data.readBits(8); // transfer_characteristics
data.skipBits(8); // matrix_coeffs
colorSpace = ColorInfo.isoColorPrimariesToColorSpace(colorPrimaries);
colorTransfer =
ColorInfo.isoTransferCharacteristicsToColorTransfer(transferCharacteristics);
}
}
}
return new SpsData(
profileIdc,
constraintsFlagsAndReservedZero2Bits,
levelIdc,
seqParameterSetId,
maxNumRefFrames,
frameWidth,
frameHeight,
pixelWidthHeightRatio,
separateColorPlaneFlag,
frameMbsOnlyFlag,
frameNumLength,
picOrderCntType,
picOrderCntLsbLength,
deltaPicOrderAlwaysZeroFlag,
colorSpace,
colorRange,
colorTransfer);
}
SPS这主要获取的SPS 的ID,编码的profile,帧宽高,以及宽高比,到这里基本可以确定解码器,确定出视频的宽高等全局参数。
PPS的解析
public static PpsData parsePpsNalUnitPayload(byte[] nalData, int nalOffset, int nalLimit) {
ParsableNalUnitBitArray data = new ParsableNalUnitBitArray(nalData, nalOffset, nalLimit);
int picParameterSetId = data.readUnsignedExpGolombCodedInt();//pic_parameter_set_id PPS的ID
int seqParameterSetId = data.readUnsignedExpGolombCodedInt();//seq_parameter_set_id SPS的ID
data.skipBit(); // entropy_coding_mode_flag
boolean bottomFieldPicOrderInFramePresentFlag = data.readBit();//bottom_field_pic_order_in_frame_present_flag
return new PpsData(picParameterSetId, seqParameterSetId, bottomFieldPicOrderInFramePresentFlag);
}
PPS的解析就简单多了主要或bottom_field_pic_order_in_frame_present_flag这一个值。
SEI的解析
public static void consume(
long presentationTimeUs, ParsableByteArray seiBuffer, TrackOutput[] outputs) {
while (seiBuffer.bytesLeft() > 1 /* last byte will be rbsp_trailing_bits */) {
int payloadType = readNon255TerminatedValue(seiBuffer);//SEI的类型
int payloadSize = readNon255TerminatedValue(seiBuffer);//SEI大小
int nextPayloadPosition = seiBuffer.getPosition() + payloadSize;
// Process the payload.
if (payloadSize == -1 || payloadSize > seiBuffer.bytesLeft()) {
// This might occur if we're trying to read an encrypted SEI NAL unit.
Log.w(TAG, "Skipping remainder of malformed SEI NAL unit.");
nextPayloadPosition = seiBuffer.limit();
} else if (payloadType == PAYLOAD_TYPE_CC && payloadSize >= 8) {//字幕类型的数据
int countryCode = seiBuffer.readUnsignedByte();//获取国家
int providerCode = seiBuffer.readUnsignedShort();//获取地区
int userIdentifier = 0;
if (providerCode == PROVIDER_CODE_ATSC) {
userIdentifier = seiBuffer.readInt();
}
int userDataTypeCode = seiBuffer.readUnsignedByte();
if (providerCode == PROVIDER_CODE_DIRECTV) {
seiBuffer.skipBytes(1); // user_data_length.
}
boolean messageIsSupportedCeaCaption =
countryCode == COUNTRY_CODE
&& (providerCode == PROVIDER_CODE_ATSC || providerCode == PROVIDER_CODE_DIRECTV)
&& userDataTypeCode == USER_DATA_TYPE_CODE_MPEG_CC;
if (providerCode == PROVIDER_CODE_ATSC) {
messageIsSupportedCeaCaption &= userIdentifier == USER_DATA_IDENTIFIER_GA94;
}
if (messageIsSupportedCeaCaption) {//开始解析字幕
consumeCcData(presentationTimeUs, seiBuffer, outputs);
}
}
seiBuffer.setPosition(nextPayloadPosition);
}
}
public static void consumeCcData(
long presentationTimeUs, ParsableByteArray ccDataBuffer, TrackOutput[] outputs) {
// First byte contains: reserved (1), process_cc_data_flag (1), zero_bit (1), cc_count (5).
int firstByte = ccDataBuffer.readUnsignedByte();
boolean processCcDataFlag = (firstByte & 0x40) != 0;
if (!processCcDataFlag) {
// No need to process.
return;
}
int ccCount = firstByte & 0x1F;
ccDataBuffer.skipBytes(1); // Ignore em_data
// Each data packet consists of 24 bits: marker bits (5) + cc_valid (1) + cc_type (2)
// + cc_data_1 (8) + cc_data_2 (8).
int sampleLength = ccCount * 3;
int sampleStartPosition = ccDataBuffer.getPosition();
for (TrackOutput output : outputs) {
ccDataBuffer.setPosition(sampleStartPosition);
output.sampleData(ccDataBuffer, sampleLength);//发送数据到SamleQueue
if (presentationTimeUs != C.TIME_UNSET) {
output.sampleMetadata(//字幕轨道sampleMetadata
presentationTimeUs,
C.BUFFER_FLAG_KEY_FRAME,
sampleLength,
/* offset= */ 0,
/* cryptoData= */ null);
}
}
}
可以看到这里解析SEI主要是为了获取其中的字幕信息,如果没有字幕信息,SEI可以直接忽略
Slice的解析
定义在SampleReader中。
public void appendToNalUnit(byte[] data, int offset, int limit) {
if (!isFilling) {//数据还没有填充足够,返回继续填充
return;
}
int readLength = limit - offset;
if (buffer.length < bufferLength + readLength) {
buffer = Arrays.copyOf(buffer, (bufferLength + readLength) * 2);
}
System.arraycopy(data, offset, buffer, bufferLength, readLength);
bufferLength += readLength;
bitArray.reset(buffer, 0, bufferLength);
if (!bitArray.canReadBits(8)) {
return;
}
bitArray.skipBit(); // forbidden_zero_bit
int nalRefIdc = bitArray.readBits(2);//nal_ref_idc优先级
bitArray.skipBits(5); // nal_unit_type
// Read the slice header using the syntax defined in ITU-T Recommendation H.264 (2013)
// subsection 7.3.3.
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
bitArray.readUnsignedExpGolombCodedInt(); // first_mb_in_slice
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
int sliceType = bitArray.readUnsignedExpGolombCodedInt();//slice_type
if (!detectAccessUnits) {
// There are AUDs in the stream so the rest of the header can be ignored.
isFilling = false;
sliceHeader.setSliceType(sliceType);
return;
}
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
int picParameterSetId = bitArray.readUnsignedExpGolombCodedInt();//获取 PPS ID
if (pps.indexOfKey(picParameterSetId) < 0) {
// We have not seen the PPS yet, so don't try to decode the slice header.
isFilling = false;
return;
}
NalUnitUtil.PpsData ppsData = pps.get(picParameterSetId);//首先通过当前Slice的PPS ID 获取到PPS
NalUnitUtil.SpsData spsData = sps.get(ppsData.seqParameterSetId);//再通过PPS的ID获取到SPS数据
if (spsData.separateColorPlaneFlag) {//separate_colour_plane_flag为1说明存在colour_plane_id
if (!bitArray.canReadBits(2)) {
return;
}
bitArray.skipBits(2); // 跳过colour_plane_id
}
if (!bitArray.canReadBits(spsData.frameNumLength)) {
return;
}
boolean fieldPicFlag = false;
boolean bottomFieldFlagPresent = false;
boolean bottomFieldFlag = false;
//通过SPS 获取到的帧序号长度读取帧序号
int frameNum = bitArray.readBits(spsData.frameNumLength);
if (!spsData.frameMbsOnlyFlag) {//frame_mbs_only_flag 不只进行帧编码
if (!bitArray.canReadBits(1)) {
return;
}
fieldPicFlag = bitArray.readBit();
if (fieldPicFlag) {//field_pic_flag 还存在场编码
if (!bitArray.canReadBits(1)) {
return;
}
bottomFieldFlag = bitArray.readBit();//bottom_field_flag 底场标识位
bottomFieldFlagPresent = true;
}
}
boolean idrPicFlag = nalUnitType == NalUnitUtil.NAL_UNIT_TYPE_IDR;//IDR 类型的NAL
int idrPicId = 0;
if (idrPicFlag) {
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
idrPicId = bitArray.readUnsignedExpGolombCodedInt();//idr_pic_id IDR帧的序号
}
int picOrderCntLsb = 0;
int deltaPicOrderCntBottom = 0;
int deltaPicOrderCnt0 = 0;
int deltaPicOrderCnt1 = 0;
if (spsData.picOrderCountType == 0) {
if (!bitArray.canReadBits(spsData.picOrderCntLsbLength)) {
return;
}
picOrderCntLsb = bitArray.readBits(spsData.picOrderCntLsbLength);//pic_order_cnt_lsb
if (ppsData.bottomFieldPicOrderInFramePresentFlag && !fieldPicFlag) {
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
deltaPicOrderCntBottom = bitArray.readSignedExpGolombCodedInt();//delta_pic_order_cnt_bottom
}
} else if (spsData.picOrderCountType == 1 && !spsData.deltaPicOrderAlwaysZeroFlag) {
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
deltaPicOrderCnt0 = bitArray.readSignedExpGolombCodedInt();//delta_pic_order_cnt[0]
if (ppsData.bottomFieldPicOrderInFramePresentFlag && !fieldPicFlag) {
if (!bitArray.canReadExpGolombCodedNum()) {
return;
}
deltaPicOrderCnt1 = bitArray.readSignedExpGolombCodedInt();//delta_pic_order_cnt[1]
}
}
sliceHeader.setAll(
spsData,
nalRefIdc,
sliceType,
frameNum,
picParameterSetId,
fieldPicFlag,
bottomFieldFlagPresent,
bottomFieldFlag,
idrPicFlag,
idrPicId,
picOrderCntLsb,
deltaPicOrderCntBottom,
deltaPicOrderCnt0,
deltaPicOrderCnt1);
isFilling = false;
}
Slice解析主要是解析了Slice的Header,用于判断是否为I帧以及判断当前NAL是否为图像的第一个VCL类的NAL,这些数据主要用于没有AUD时确定SampleMetadata的时机。
下面我们来动态看下SampleMetadata基于流的时序关系图:

对照上图可以看出,H264Reader 一开始就会将所有数据Sample到SampleQueue,接下来会查找第一个NAL开始位置,如果读取到第一个AUD,记录AUD开始位置为samplePosition,作为这段SampleData的有效开始位置,下面数据序列首先会将SPS,PPS这2个索引的NAL放在前面,等解码器获取了SPS和PPS基本上就能确定解码器的具体配置,这个时候会调用SampleQueue的format方法将解码器格式输出,用于解码器的初始化等。当读取到下一个AUD的时候将这个AUD的开始位置作为有效SampleData的结束位置,通过有效结束位置(absolutePosition)-有效开始位置(samplePosition)获得当前有效数据长度(size),同时通过当前AUD的长度(nalUnitLength)+下一个NAL头到数据段末尾的距离(bytesWrittenPastPosition)得到offset,将size和offset传给SampleQueue的sampleMetadata方法,sampleMetadata里通过数据总长度-size-offset确定当前SampleData有效数据的开始位置,这样就记录了每个Sample的开始位置和长度,当Rendere读取数据用于解码时,就可以查询这个开始位置和长度读取有效的视频数据给解码器。
总结
到这里ProgressiveMediaPeriod的数据解析部分终于讲完,那么这些解析的数据是如何加载的呢,这就是ProgressiveMediaPeriod整体架构右半部分的最后一块拼图——DataSource,这也是我们后面要讲的内容了。
版权声明 ©
本文为CSDN作者山雨楼原创文章
转载请注明出处
原创不易,觉得有用的话,收藏转发点赞支持