突破浅水、低流速,中海达iFlow系列智能型ADCP创新“低”!
近日,为了验证中海达iFlow RP1200智能型ADCP在各种环境下测流性能一致性的能力,中海达在贵州水文等大力支持下,先后在南花水文站、兴仁桥水文站、贵阳水文站等水文站进行测流演示,以优异的结果获得了用户的认可。
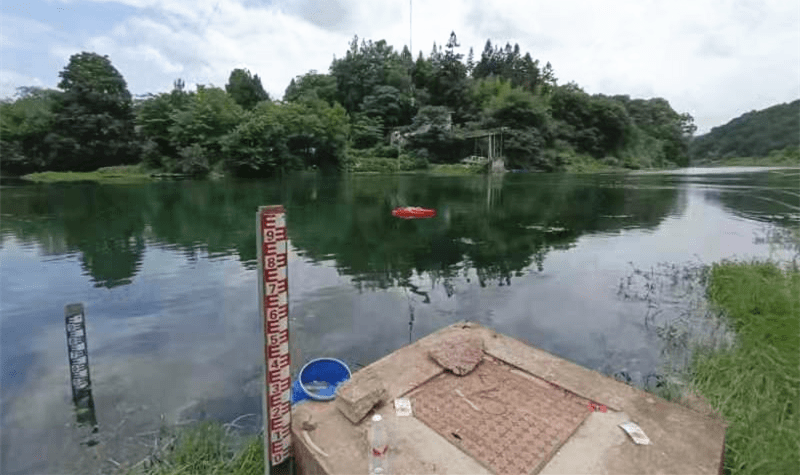
南花水文站
演示当天,站点河宽约43m、平均流速约0.6m/s,最大流速约1.2m/s,平均水深约0.8m,总流量约20m³/s。

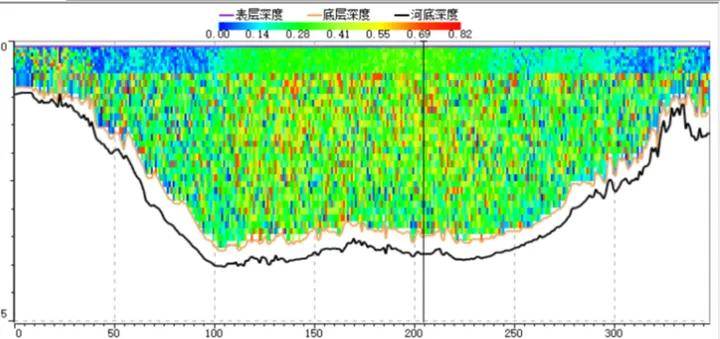
测回具体测量结果如下所示:
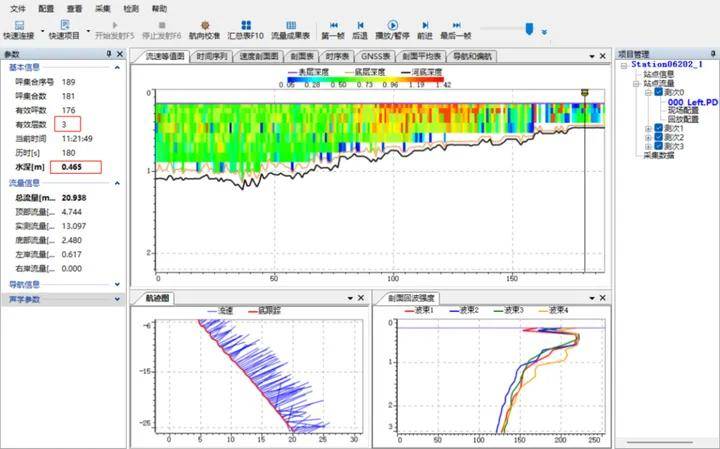

由上述可知,在当前环境下,水深仅0.4m时仍可得到3层有效层,设备测得流量四个半测回最大相对偏差为-2.18%,实测占比、均超过了60%,符合测流规范与客户要求。
兴仁桥水文站
演示当天,站点河宽约60m,平均流速约0.2m/s,最大流速约0.7m/s,平均水深约3m,总流量约39m³/s。测验当天,在多个测回近1个半小时施测过程中,受上游水工建筑影响,水位有明显变化。
测回具体测量结果如下所示:

根据水文站实时水位信息可知,流速和流量在测量过程中发生变化,变化趋势如下图所示。
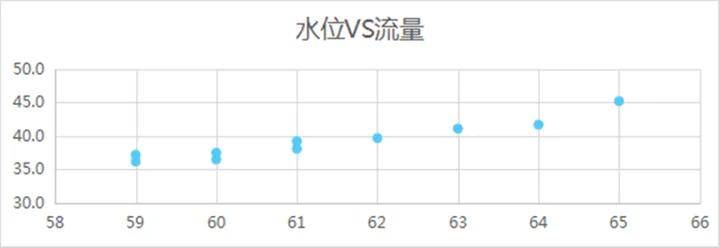

由图可知,流量随着水位的上升而增大,变化趋势线基本一致,在测次9和测次10间流量变化较快,根据结束测量后实时水位达到647.71m判断该时段流量明显增大。因此,根据水位变化情况,各个回流量变化趋势符合实际情况。
由上述可知,在当前环境下,设备测得流量变化趋势符合流域水文变化规律,符合测流规范与客户要求。
贵阳水文站
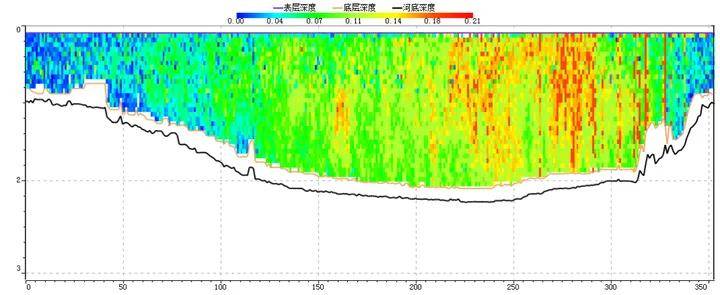
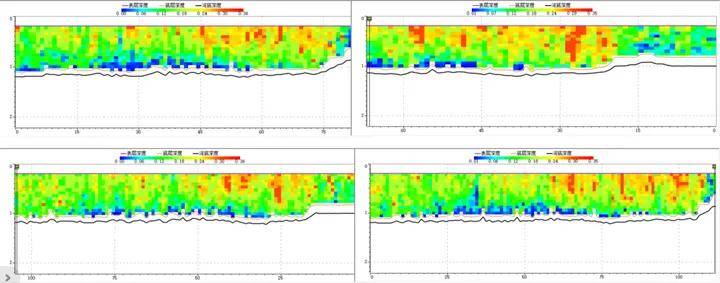
演示当天,站点南明河,河宽约40m、平均流速约0.86m/s,最大流速约1.2m/s,平均水深约1.1m,总流量约39m³/s。

测回具体测量结果如下所示:

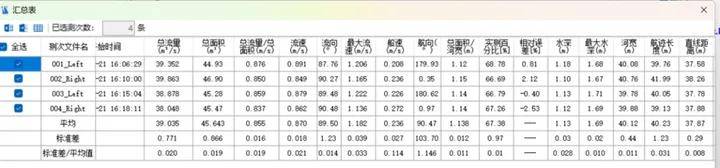
由上述可知,在当前环境下,设备测得四个半测回流量最大相对偏差为-2.53%,实测占比均超过了66%,符合测流规范与客户要求。
南京某河段
演示当天,站点河宽约50米、平均流速<0.1m/s、平均水深约1.8米、最大水深2米。

测回具体测量结果如下所示:

由上述可知,4个半测回流量相对偏差0.4%、3.8%、4.0%、0.2%,实测流量占比86%,满足规范要求。
昆明某河段
演示当天,河宽约12米、平均流速0.18m/s、平均水深约1.1米、最大水深1.2米。

测回具体测量结果如下所示:

由上述可知,4个半测回流量相对偏差0.0%、0.0%、2.6%、-3.0%,实测流量占比>65%,满足规范要求。
通过演示,中海达iFlow RP1200智能型ADCP实现了各水域环境全覆盖:浅水+低流速、浅水+高流速、中水+低流速、中水+高流速的各种复杂、难点环境的流量测验,解决了用户浅水、低流速测流闭合难等痛点问题,进一步拓宽应用场景。未来,中海达将继续研发性能更优的水文监测产品,为水利高质量发展贡献科技力量。