ROS Noetic版本 rosdep找不到命令 不能使用的解决方法
使用rosdep指令来安装开源包所需的依赖是很方便的,本文主要介绍ROS Noetic版本中使用rosdep,报错找不到命令 ,rosdep不能使用的解决方法。
rosdep:找不到命令
Command 'rosdep' not found, but can be installed with:
sudo apt install python3-rosdep2
在我之前的文章《详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)》中安装ROS Noetic版本的过程中也遇到过这个问题,当时的解决方法是接受了终端给出的建议,也就是使用以下指令:
(这个推荐指令是个坑,先不要执行以下指令,继续往下看!!!)
sudo apt install python3-rosdep2
若执行以上指令,则会出现以下界面,它既不会解决rosdep不能使用的问题的,还会删除我们已经安装的需要使用的包。
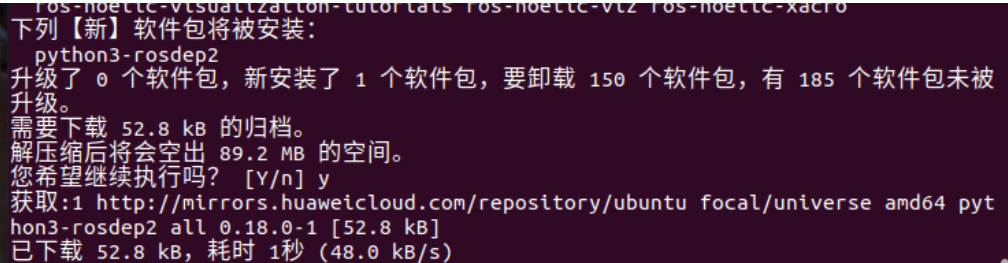
实际上这个坑是因为其推荐指令错了,其实对于ROS Noetic版本而言应该安装的是python3-rosdep,而不是python3-rosdep2。
这个问题感谢博主shandianchengzi 在我上面文章评论区的提醒,当时该优质评论已被我置顶了
所以,只要执行下面这条指令就可以顺利安装ROS Noetic版本的rosdep了
sudo apt install python3-rosdep
然后,使用以下两条指令,初始化及更新一下rosdep就可以正常使用了
sudo rosdep init
rosdep update
以上两条指令若报错,推荐借助六部工坊的配置修改工具(该方法强烈推荐----简单有效)解决,方法如下:
(1)运行以下指令,安装Python的软件包管理工具 pip
sudo apt-get install python3-pip
(2)运行以下指令,使用pip安装配置修改工具
sudo pip3 install 6-rosdep
(3)运行以下指令来运行配置修改工具
sudo 6-rosdep
接下来就可以正常运行sudo rosdep init和rosdep update指令了
sudo rosdep init
rosdep update
然后就可以正常使用rosdep指令了
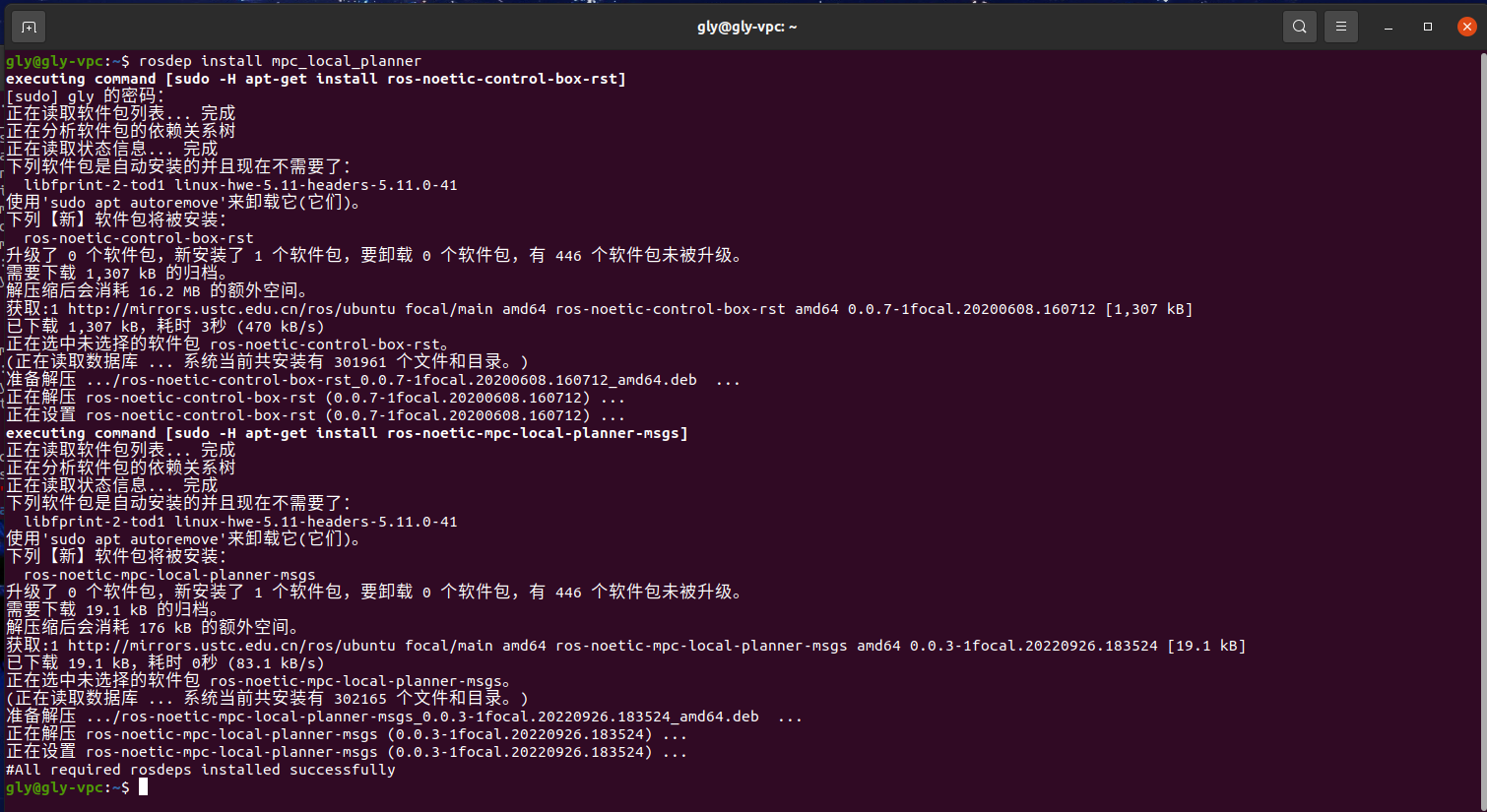
下图是我使用rosdep指令安装mpc局部路径规划器所需要的依赖的示例,可以发现所需要的依赖已成功安装
–