第7节、双电机直线运动【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:前面章节主要介绍单个电机控制,本节内容介绍两个电机完成Bresenham直线运动
一、Bresenham直线算法介绍
Bresenham直线算法由Jack Elton Bresenham于1962年在IBM开发,最初用于计算机显示直线,它确定应该选择的n维光栅的点,以便形成两点之间的直线的近似。因为它仅使用整数加法,减法和位移,非常适合单片机系统。
二、算法推导
关于该算法的视频推导教程非常多,推荐B站洛阳鸿卓课工场-白洋老师的Bresenham算法教程,讲解十分详细,链接如下:
https://www.bilibili.com/video/BV1eE411p7tn/?spm_id_from=333.337.search-card.all.click&vd_source=cbda27af6174dc53fd338dba3ab7dc66
三、算法移植
根据单片机步进电机系统的特点,将bresenham算法移植到单片机系统,与上述视频教程方式有区别,单片机系统适合正数处理,将坐标原点移动至左下角,即整个可移动区域为第一象限
第一种情况:直线在第一象限前半区(0<θ≤45)
第二种情况:直线在其他位置
统一转换到第1区处理,处理流程如下:
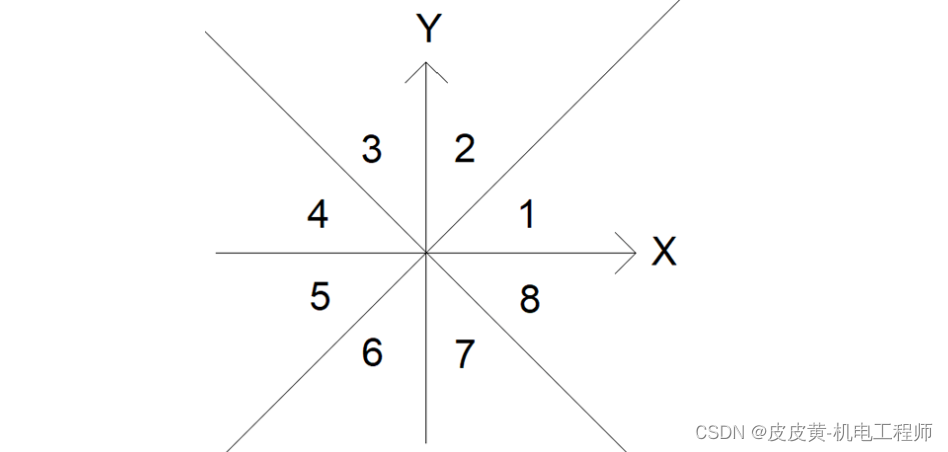
1、 通过直线起点坐标P1(X1,Y1),终点坐标P2(X2,Y2),可以判断向量位于哪个方位
2、 判断主轴与方向
1/4/5/8四个方位主轴为X,副轴为Y,其中1/8主轴电机方向为正,4/5主轴电机方向为负
2/3/6/7四个方位主轴为Y,副轴为X,其中2/3主轴电机方向为正,6/7主轴电机方向为负
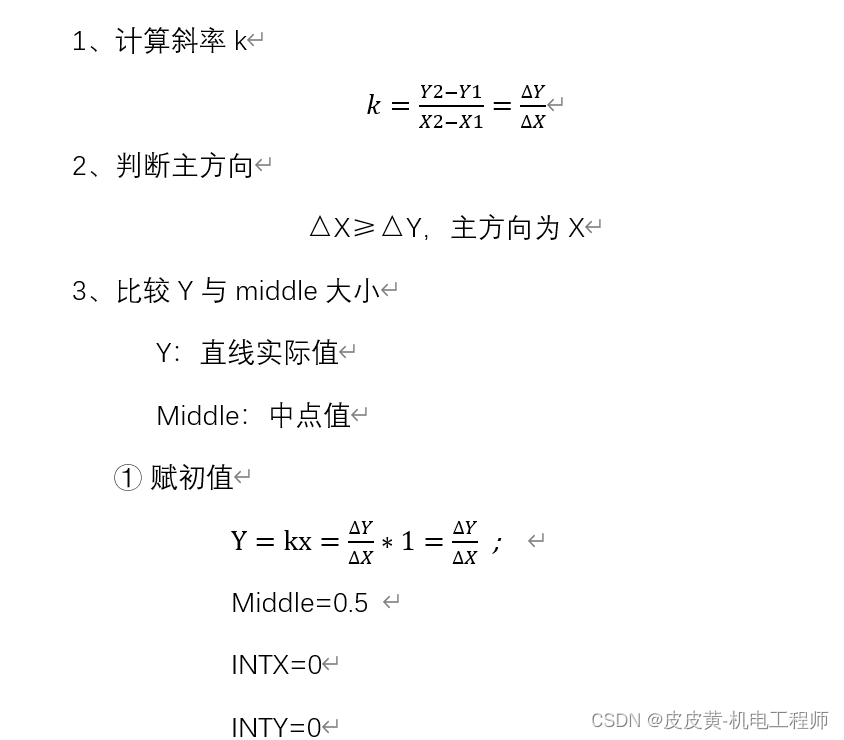
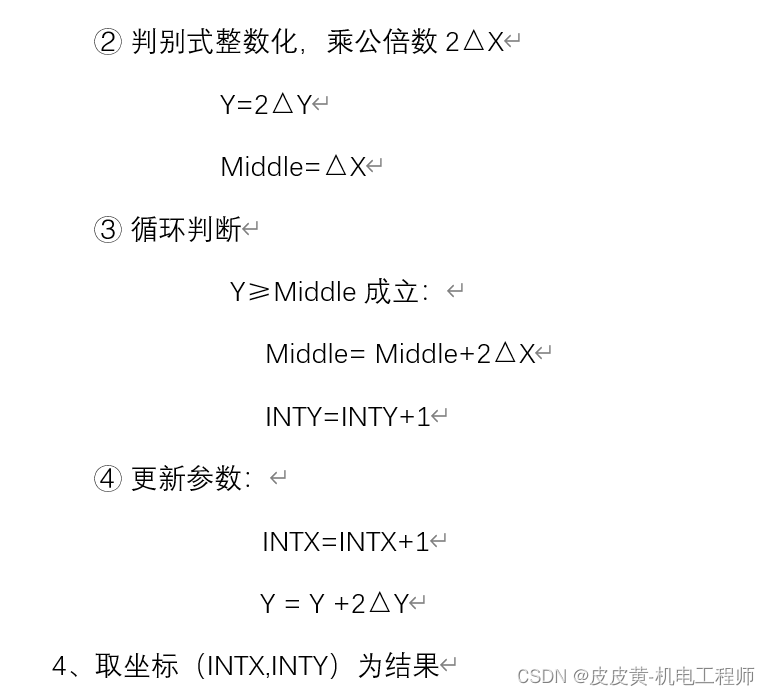
3、 根据Bresenham算法判断是否有副轴移动
让主轴匀速移动,根据Bresenham的算法,判断移动主轴的每一步,是否需要移动副轴,最终实现直线插值运动
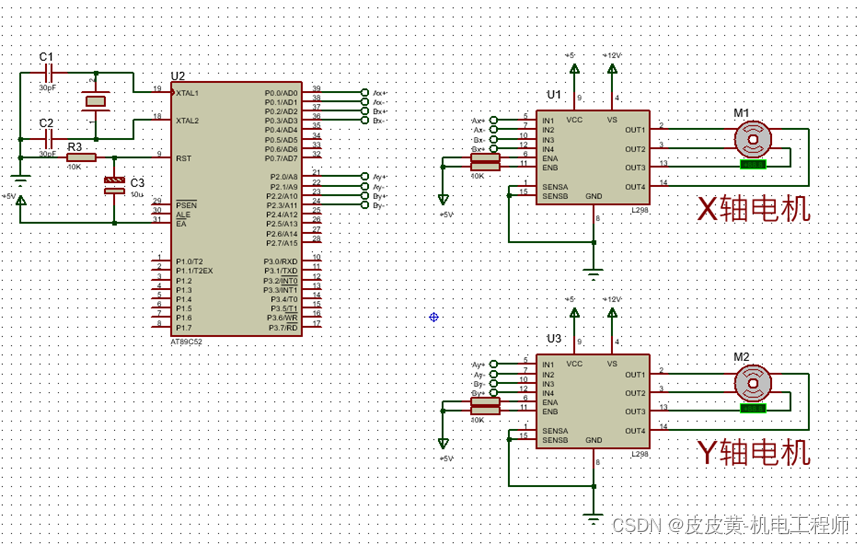
四、proteus仿真及实测
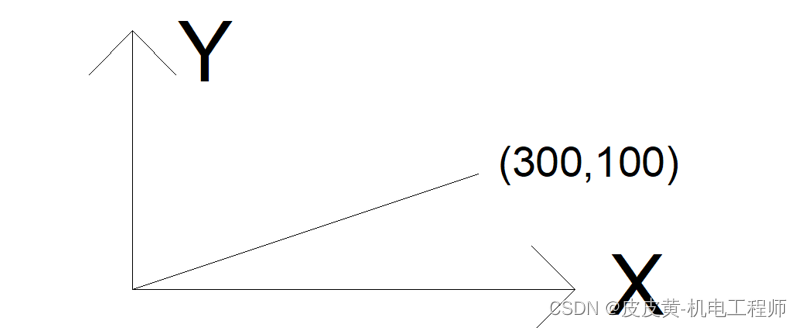
为了直观显示坐标值,该仿真中已调整步距角,步进电机每走一步为1°,即电机显示的角度为坐标值,起点(0,0),终点(300,100)
五、附件
proteus仿真文件百度网盘链接:
链接:https://pan.baidu.com/s/1KC36wo2Xcsa-VOYWwXm0fg
提取码:1x64
Keil工程文件获取链接:
https://item.taobao.com/item.htm?ft=t&id=764303950500