5-4、S加减单片机程序【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:本节介绍实现步进电机S曲线运动的代码
一、目标功能
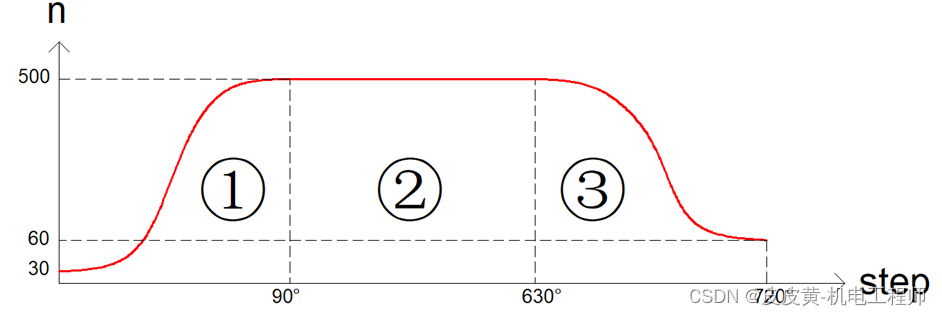
实现步进电机转动总角度720°,其中加减速各90°
加速段:加速类型:S曲线
加速角度:角度为90°
起步速度:30RPM
终止速度:500RPM
匀速段:
匀速角度:角度为540°
匀速速度:500RPM
减速段:减速类型:S曲线
减速角度:角度为90°
起步速度:500RPM
终止速度:60RPM
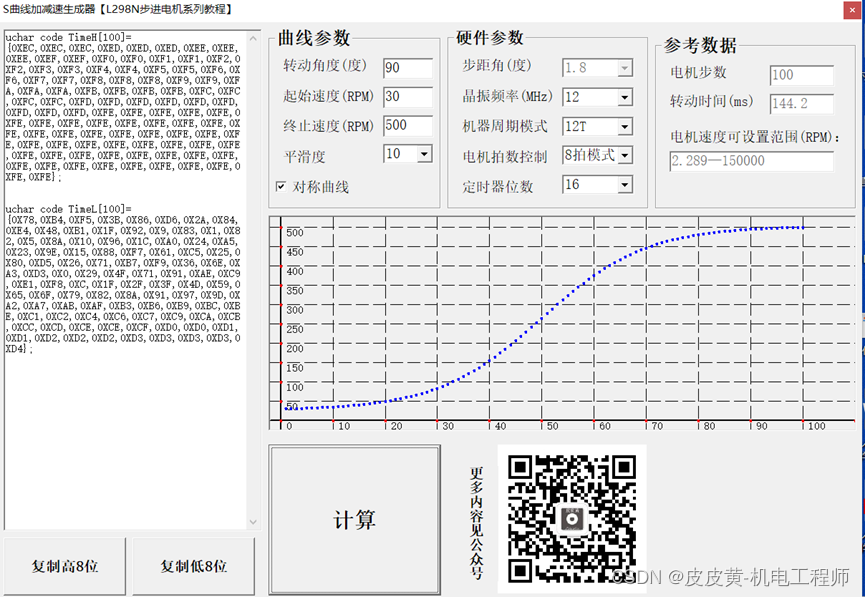
二、生成器计算
加速参数计算
匀速参数计算,主要计算电机步数

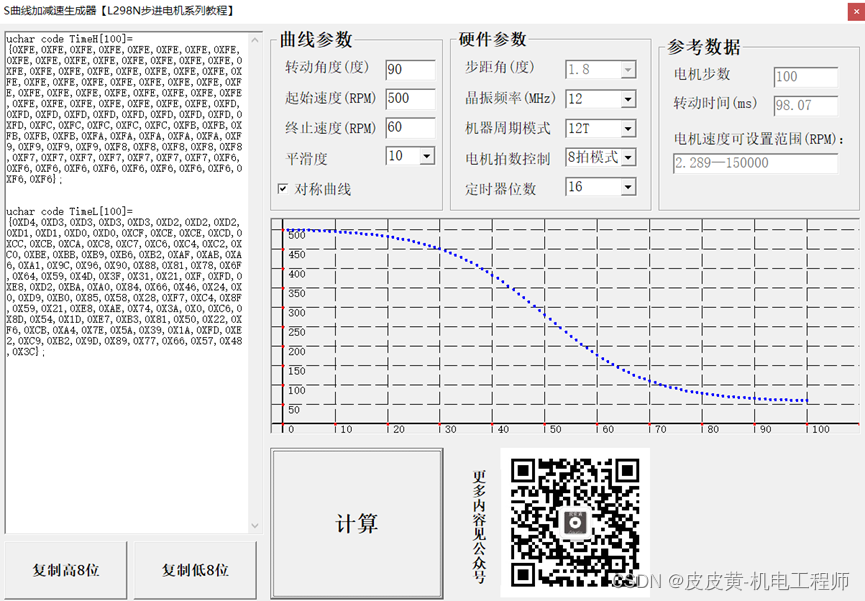
减速参数计算
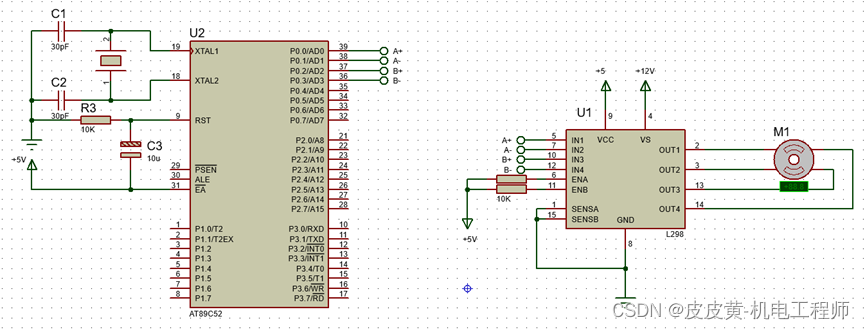
三、proteus仿真及实测
四.总结
通过上述计算,完成S曲线加减速运动。通过调整匀速运动的角度,加减速过程不变,可以实现总转动角度的变化,适用于总转角需要变化且需要较高速度的情况,并且满足总转角应大于加减速转角之和。
对于大多数情况,加减速的过程可以合并,即用S加速的逆过程去实现减速,可以实现代码的简化
五、附件
proteus仿真文件百度网盘链接:
链接:https://pan.baidu.com/s/10snB8MxewSq0w3szx1s9lA
提取码:csxh
Keil工程文件获取链接:
https://item.taobao.com/item.htm?ft=t&id=764181768151