ubuntu中尝试安装ros2
首先,ubuntu打开后有个机器人栏目,打开后,有好多可选的,看了半天
,好像是博客,算了,没啥关系,再看看其他菜单
这些都不是下载链接。先不管,考虑了一下,问了ai,决定下个虚拟机吧,性能好点的就是visualbox了。新电脑,前置安装vc运行时库
Latest supported Visual C++ Redistributable downloads | Microsoft Learn![]() https://learn.microsoft.com/en-GB/cpp/windows/latest-supported-vc-redist?view=msvc-170其次安装visualbox
https://learn.microsoft.com/en-GB/cpp/windows/latest-supported-vc-redist?view=msvc-170其次安装visualbox
Oracle VM VirtualBox![]() https://www.virtualbox.org/
https://www.virtualbox.org/

还没用过,试试看
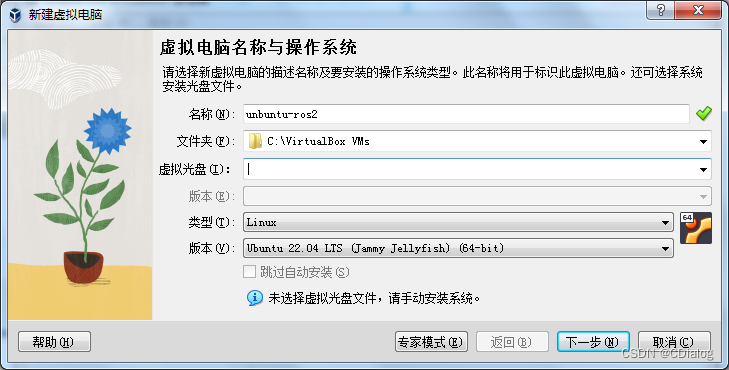
根据网上的教程,下载这个版本吧
安装完成

下来根据ros教程一步步安装
- Ubuntu (Debian packages)就是安装包,安装过程通过命令行在线下载就行,没有直接下载整体安装包。
然后,tmd我想骂人了,虚拟机里安装的ubuntu居然打不开命令行。。。。wocao
重新弄个u盘,在实体机上装ubuntu吧,dayede
找到
rufus-3.22.exe
这玩意说是可以在windows上安装ubuntu
准备在我windows上安装双系统
然后,分区又碰到麻烦,算了,直接把硬盘干了,整个装ubuntu
Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentation![]() https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
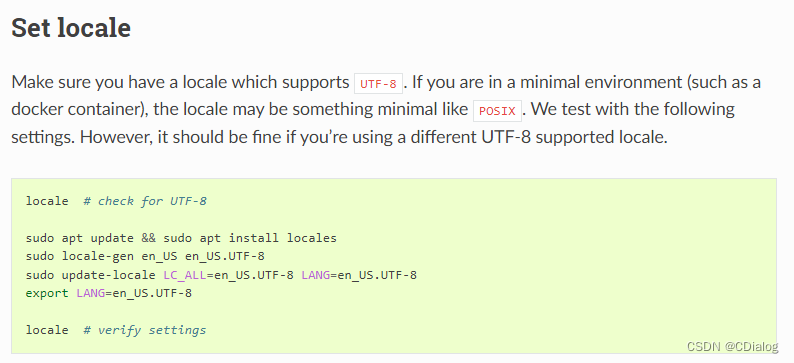
系统安装好后,按照官网步骤,最主要是
sudo apt install ros-humble-desktop
然后发现软件源的问题,需要更换国内的
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ lsb_release -cs main" > /etc/apt/sources.list.d/ros-latest.list'这个命令的作用是为Ubuntu系统配置中科大(USTC)镜像站提供的ROS软件包仓库,并不是更新源本身。具体步骤如下:
-
sudo sh -c:执行后面的命令片段,这里的-c参数表示后面跟着要执行的命令字符串。 -
. /etc/lsb-release:读取/etc/lsb-release文件的内容,该文件包含了当前Ubuntu发行版的信息,如版本代号(codename)。 -
echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/lsb_release -csmain" > /etc/apt/sources.list.d/ros-latest.list: 这部分是在创建一个新的APT软件源列表文件,指向中科大的ROS Ubuntu镜像。其中lsb_release -cs命令会获取当前系统的Ubuntu版本代号,然后将中科大的ROS仓库地址和版本代号一起写入到/etc/apt/sources.list.d/ros-latest.list文件中。
这样一来,当您后续执行 apt update 更新软件包列表时,系统就会从中科大的ROS镜像下载ROS相关的软件包,而不是官方或其他默认源。所以,这个命令实际上完成了添加ROS特定源的操作,而非更新已存在的源信息。
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
记得运行sudo apt update命令来更新软件包,让镜像生效
其中碰到一个公钥的问题,这么解决的
# 确保当前用户具有足够的权限
sudo -s
# 清除已存在的 ros2.gpg 文件(如果存在)
rm -f /etc/apt/trusted.gpg.d/ros2.gpg
# 正确地重新导出公钥为 ASCII-armored 格式并保存
gpg --export --armor F42ED6FBAB17C654 > /etc/apt/trusted.gpg.d/ros2.asc
# 更新软件包列表,并检查是否成功导入了公钥
apt-get update继续开始核心安装工作
sudo apt install ros-humble-desktop所有安装自动进行,还是满简单的。

有三个版本,我选择了桌面版本
顺利安装成功,然后运行helloworld demo测试,一切顺利。

更多的功能研究,Tutorials — ROS 2 Documentation: Humble documentation![]() https://docs.ros.org/en/humble/Tutorials.html这个位置有更多的案例和tutorails。
https://docs.ros.org/en/humble/Tutorials.html这个位置有更多的案例和tutorails。
更多学习:安装小乌龟,从教学教程。
sudo apt update
sudo apt install ros-humble-turtlesimros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key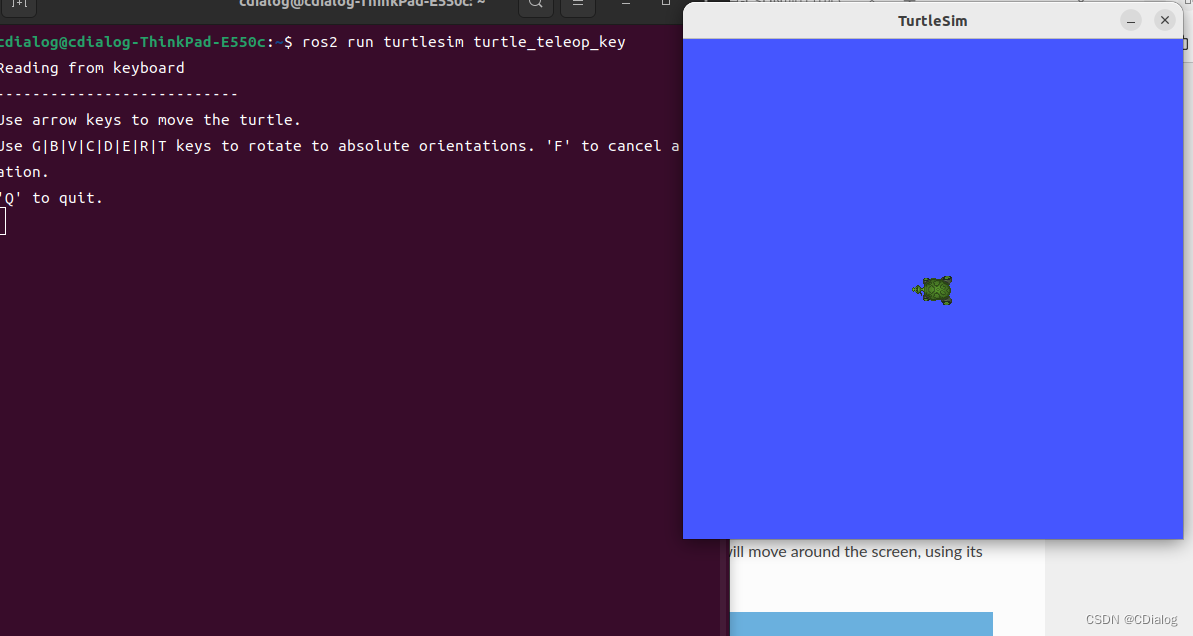
安装rqt模拟器
sudo apt update
sudo apt install ~nros-humble-rqt*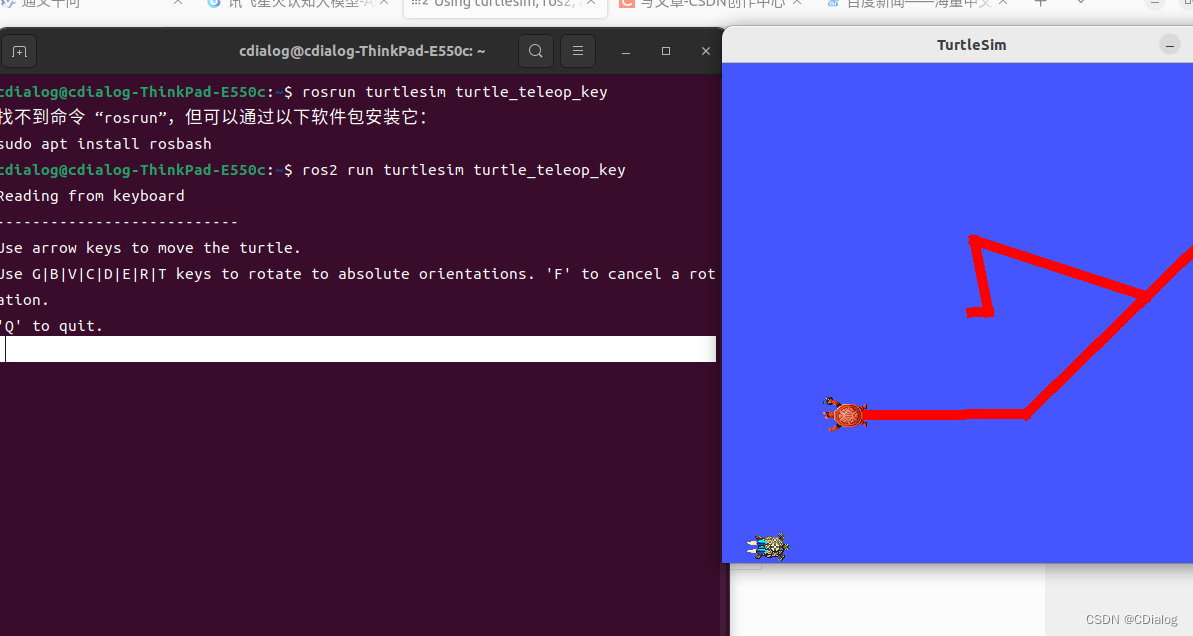
大概就是这样吧,机器人没有体验到,倒是感觉作了一个小游戏。
感觉吧,ros2的作用就是多控1的感觉,比如给一个控制点,添加很多因素,ros的作用就是综合判断根据规则给出决策,也不知道我判断对不对。
初步研究到此为止了,等我后续弄好硬件再来玩玩。