openpnp - 调整轴的步进精度
文章目录
- openpnp - 调整轴的步进精度
- 概述
- 笔记
- 沙冰主板的配置 - 每mm步数
- openpnp的配置 - 每mm步数
- 钢板尺的测量效果
- 备注
- END
openpnp - 调整轴的步进精度
概述
拿到手的设备, 验证X,Y轴的精度.
拿钢板尺放在顶部相机下面, 用JOG面板和顶部相机配合.
发现X轴每走100mm, 多走0.1mm. 我的X轴为800mm, 如果从左走到右, 那差不少呢.
Y轴也是多走了, 比X轴程度轻一些.
请教同学, 本来想调整伺服控制器的参数, 将控制轴的脉冲数增加10倍.
他想了一个好办法, 只需要将设备配置文件和openpnp的每mm步数自己微调, 就行.
试了一下好使, 现在X, Y各走500mm, 总误差不到0.1. 懒得再调整了, 就这了.
笔记
沙冰主板的配置 - 每mm步数
# Basic motion configuration
default_feed_rate 60000 # Default speed (mm/minute) for G1/G2/G3 moves G1/G2/G3移动的默认速度(mm/min)
default_seek_rate 60000 # Default speed (mm/minute) for G0 moves G0移动的默认速度(mm/min)
mm_per_arc_segment 0.0 # Fixed length for line segments that divide arcs, 0 to disable
#mm_per_line_segment 5 # Cut lines into segments this size
mm_max_arc_error 0.01 # The maximum error for line segments that divide arcs 0 to disable
# note it is invalid for both the above be 0
# if both are used, will use largest segment length based on radius
# Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
# See http://smoothieware.org/stepper-motors
# alpha_steps_per_mm 修改前是100
alpha_steps_per_mm 99.9 # Steps per mm for alpha ( X ) stepper X轴步进电机每毫米步数
# beta_steps_per_mm 修改前是100
beta_steps_per_mm 99.95 # Steps per mm for beta ( Y ) stepper Y轴步进电机每毫米步数
# gamma_steps_per_mm 不方便测量, 就算差个0.x也无所谓
gamma_steps_per_mm 100 # Steps per mm for gamma ( Z ) stepper Z轴步进电机每毫米步数
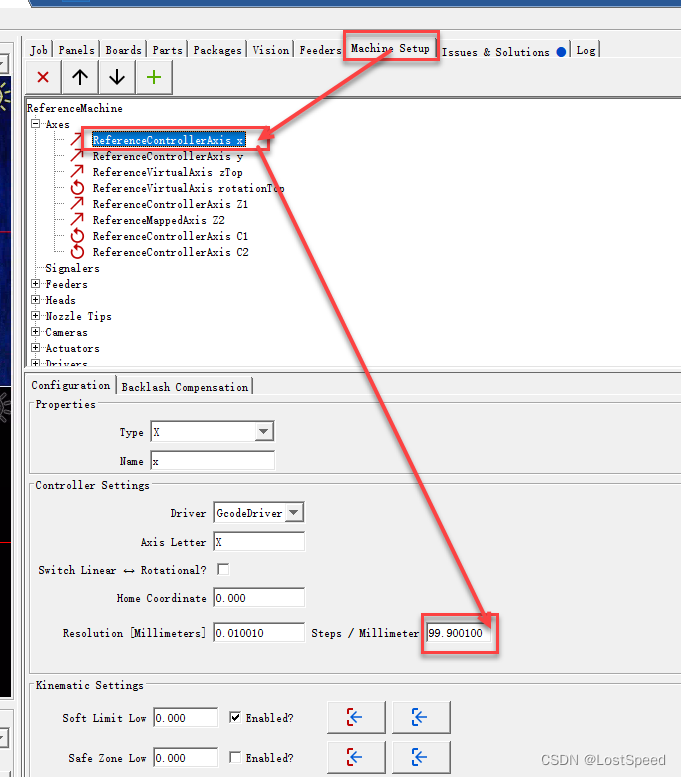
openpnp的配置 - 每mm步数
openpnp中的每mm步数要和主板配置的每mm步数相同.

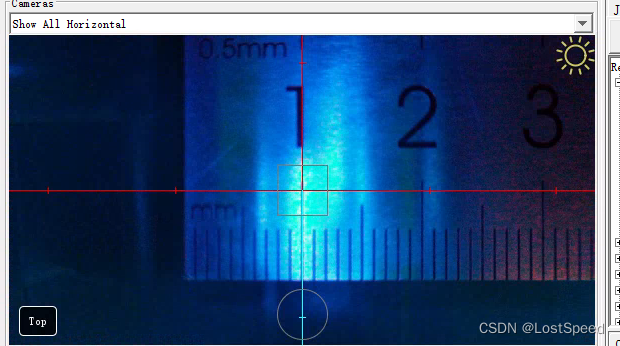
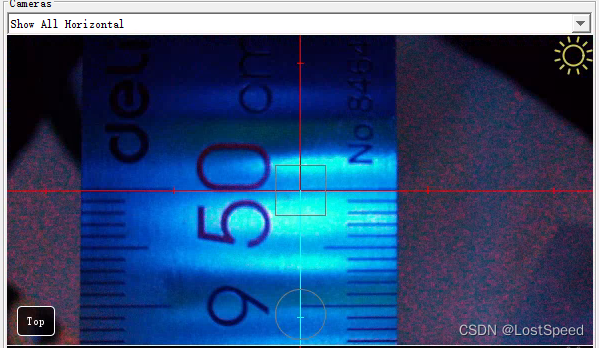
钢板尺的测量效果
手头的钢板尺就500mm长, 钢板尺在工作平面上只有夹具的2个支撑点,估计有弯曲.
X方向-起点
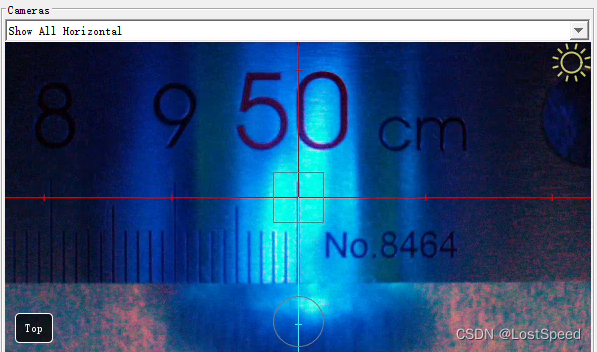
X方向-终点
向右每次走100mm,走5次, 再向左走10mm
Y方向-起点
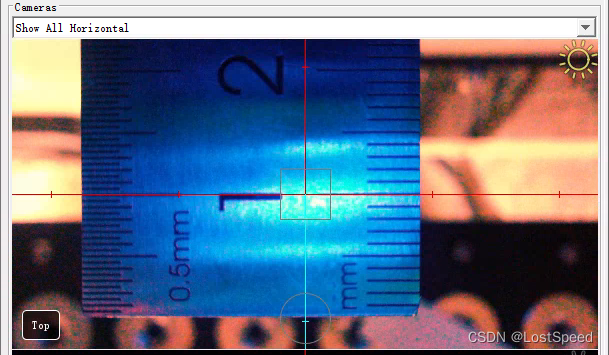
Y方向-终点
备注
因为测量工具就是一个普通的500mm钢板尺, 钢板尺的支点也不是一个平面(钢板尺放置后, 也是有弯曲的), 大概齐测量一下.
起点和终点都能压线, 这就挺好的.
精度主要靠硬件, 软件配置上可以微调一下. 数值精度是小数点后2位.