0x03数学预备
线性代数
标量
实质上就是一个点或者说是一个零维的ndarary
x = torch.tensor(3.0)
y = torch.tensor(4.0)
x + y, x * y, x / y, x ** y, x > y
向量
向量基本运算遵循广播机制,对应的点相加减,相乘除,长度是L2范数
在大量文献中,列向量为向量的默认方向
长度、维度、形状
长度:长度为n等价于有几个元素
维度:向量或轴的元素数量
形状:几维几维
矩阵
正定矩阵: x T A x ≥ 0 x^TAx \geq 0 xTAx≥0
转置操作:交换矩阵的行和列
A.T
计算
向量点积
y = torch.ones(4, dtype = torch.float32)
x, y, torch.dot(x, y)
# (tensor([0., 1., 2., 3.]), tensor([1., 1., 1., 1.]), tensor(6.))
踩个坑:点积要求类型一样
矩阵乘向量
注意函数不一样(Matrix Vector Multiplication)
矩阵乘矩阵
遵循线代中的矩阵乘法
B = torch.ones(4, 3)
torch.mm(A, B)
tensor([[ 6., 6., 6.],
[22., 22., 22.],
[38., 38., 38.],
[54., 54., 54.],
[70., 70., 70.]])
求范数
范数通常用来代表特征之间的距离来表示样本之间的相似度
L2范数
u = torch.tensor([3.0, -4.0])
torch.norm(u)
L1范数
torch.abs(u).sum()
F范数,在矩阵中用的比较多
torch.norm(torch.ones((4, 9)))
张量
# 更多的轴
X = torch.arange(24).reshape(2, 3, 4)
tensor([[[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]],
[[12, 13, 14, 15],
[16, 17, 18, 19],
[20, 21, 22, 23]]])
# 仔细观察2 3 4都是什么
# 在1个三维张量中,有2个二维矩阵,每个二维矩阵有3个向量,每个向量有4个标量
计算
A = torch.arange(20, dtype=torch.float32).reshape(5, 4)
B = A.clone()
A, A + B, A * B
注意,这里的加减乘除都是对应元素的加减乘除,并非完全按照矩阵运算来做
这里的按元素乘法也称为哈达玛积
这里的A也可以是标量,一样转化为对矩阵每个元素进行加减
求和
sum函数进行求和
当sum后不带参数的话最好理解的,也就是对所有元素进行求和
首先需要明确的是,axis是怎么确定的。以三维来举例,[2, 4, 5](这个就可以用shape来查看),0代表是第一个维度,也就是行
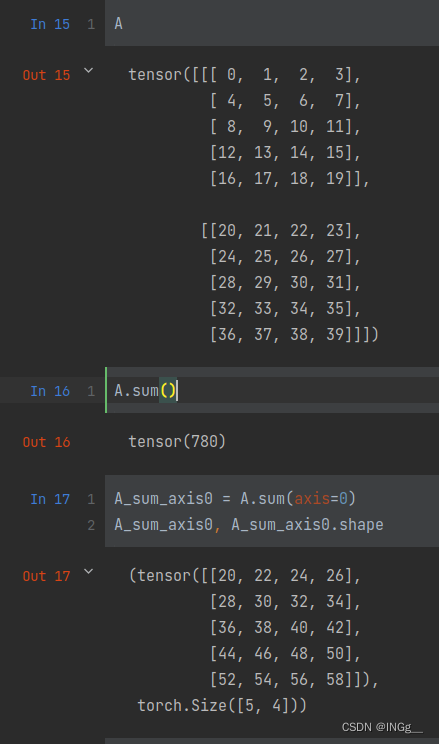
观察一下,按照行对应的元素,对应元素相加,对张量拍扁了0+20, 1+21....
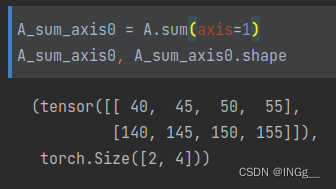
同样的,按照列求了和,剩下的维度就是[2, 4]
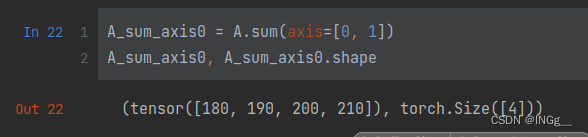
如果多维求和的话,简单理解就是去掉其他的轴;形象的理解就是按照顺序依次求和
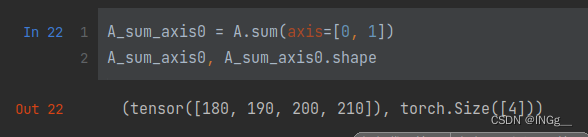
比如说,前面已经算过axis=0的时候的结果了(往上数第三张图),再按照已经算出来的结果再讲其按照另一个还没算的维度,也就是此时是新得到的矩阵的行压缩,列求和
保持维度加上参数keepdims=True,目的是方便跟广播
A_sum_axis0 = A.sum(axis=[0, 1], keepdims=True)
A_sum_axis0, A_sum_axis0.shape
# (tensor([[[180, 190, 200, 210]]]), torch.Size([1, 1, 4]))
累加操作:
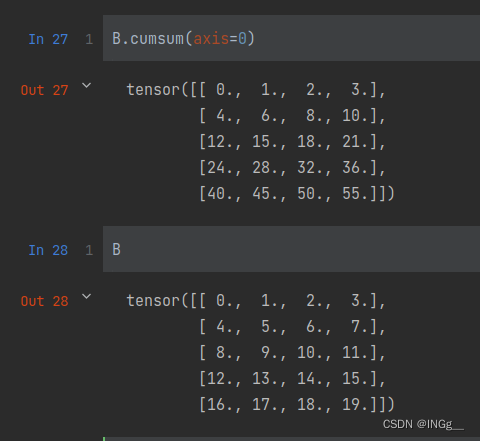
形象的来看实际上是一种前缀和
微积分
标量求导
就是常见的求导方式
亚导数:求导扩展到不可微的情况下
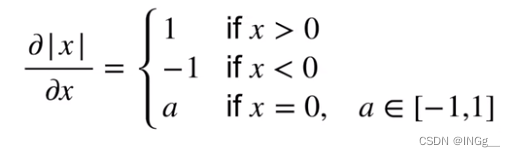
这时候a可以在-1到1之间取任意值
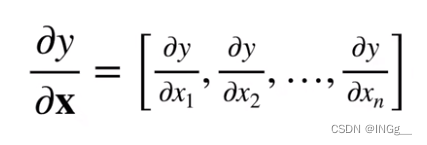
梯度
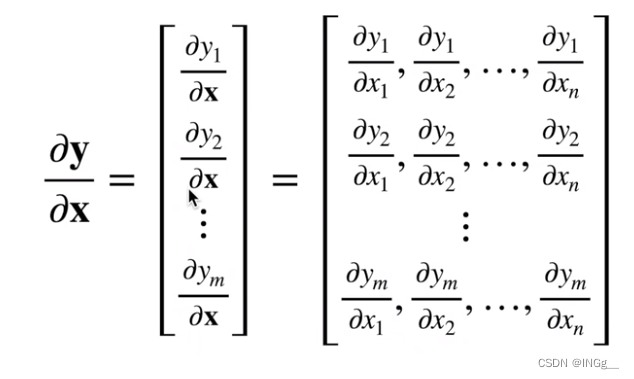
导数扩展到向量
连结一个多元函数对其所有变量的偏导数,以得到该函数的梯度(gradient)向量

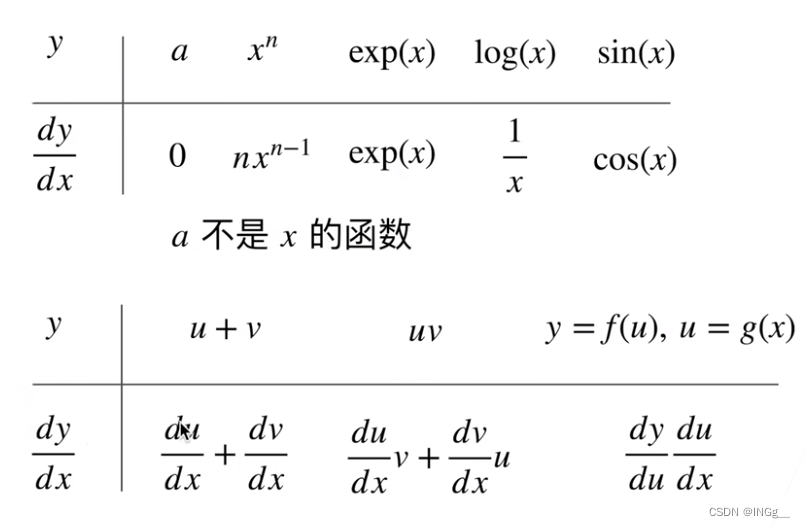
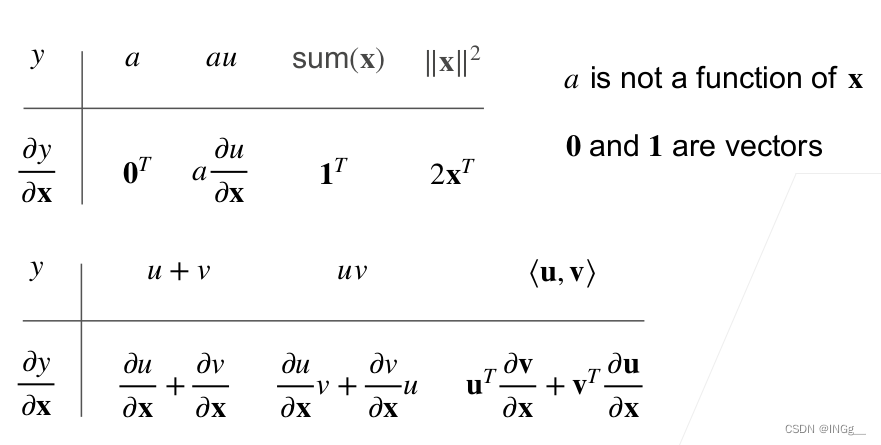
微分多元函数求导法则
标量对向量求导:
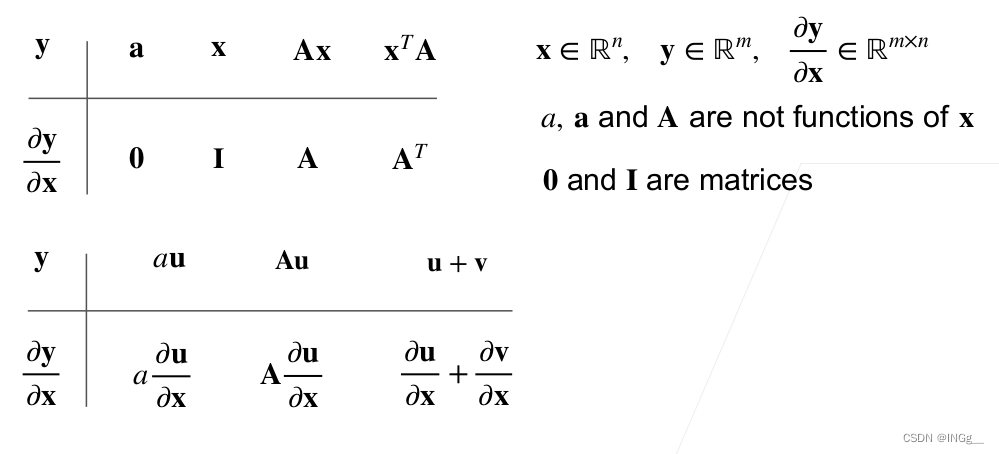
向量对向量求导:
自动求导
理论
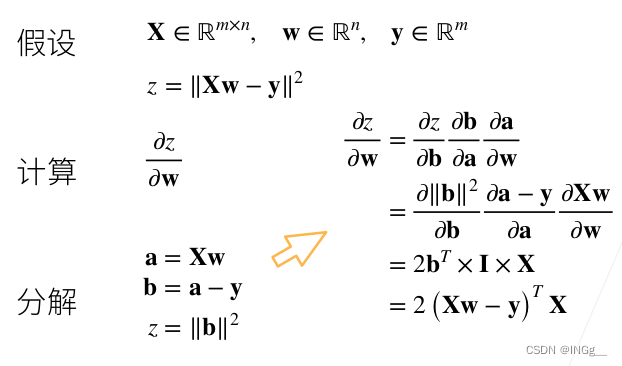
解释自动求导之前需要先进行链式法则来进行整理
先将函数一步步的拆分,然后逐个求导。
标量的求导还是比较好理解的,例子如下,使用的是线性回归的例子:
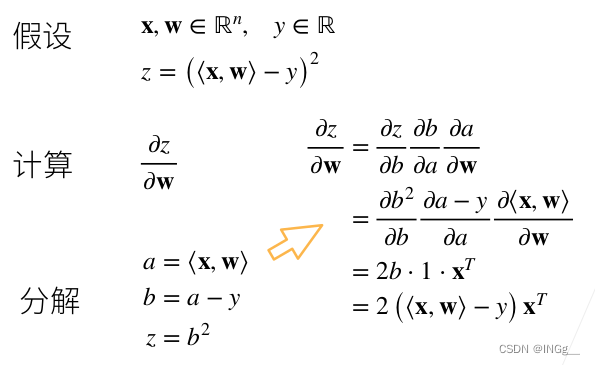
这里可以解释x是行向量,w是列向量,内积对列向量求导还是列向量,而x是行向量,所以取转置
矩阵的求导需要借助上面几个图的公式来进行
在自动求导中,使用反向累积(反向传播)相比正向传播的好处是能够节省内存,不需要在正向的过程中读取之前的结果,同时如果不需要求其中某个变量的导数也可以相应的减少计算量
正向就是求复合函数的值,反向就是求偏导数和梯度,数学中的求导就是反向传播的求导方向
实践
x = torch.arange(4.0)
x.requires_grad_(True) # 用来声明存储梯度的空间
print(x.grad) # 一开始默认为None
y = 2 * torch.dot(x, x) # 随便创建一个函数做实验 y = 2(x1*x1 + x2 * x2 + ...)
y
y.backward()
x.grad # 得到的结果我们通过数学知识知道应当为 4x
# tensor([ 0., 4., 8., 12.])
x.grad == 4 * x
tensor([True, True, True, True])
# 在默认情况下,PyTorch会累积梯度,我们需要清除之前的值
x.grad.zero_()
x.grad.zero_()
y = x * x
u = y.detach() # detach就是让新创建的变量不对x求梯度,把y看做常数
z = u * x
z.sum().backward()
x.grad == u
tensor([True, True, True, True])
控制流的梯度计算
def f(a):
b = a * 2
while b.norm() < 1000:
b = b * 2
if b.sum() > 0:
c = b
else:
c = 100 * b
return c
a = torch.randn(size=(), requires_grad=True)
d = f(a)
d.backward()
这个函数仍定义f(a)以及a的线性变化,所以最终的梯度就是f(a)/a的形式
f(a)是a的分段线性函数,则d=f(a)=ka,梯度就是k,k=d/a
调用f(a)函数返回的值,是一个关于a的线性函数,所以d关于a的导数就是这个线性函数中a的系数