搜维尔科技:数据手套+机械手遥操作,五指触感灵巧手解决方案!
本灵巧手模仿人手的自由度分配及相关运动学参数进行设计的灵巧手,整手的手指设计采用了模块化的思想。整机重量轻,单指指尖抓取力强,五指灵巧手作为人体机器人或者机械臂末端操作工具,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,以及复杂任务的操作。该灵巧手,凭借指尖末端多阵列压力传感器,可高精度地执行多种抓取操作。

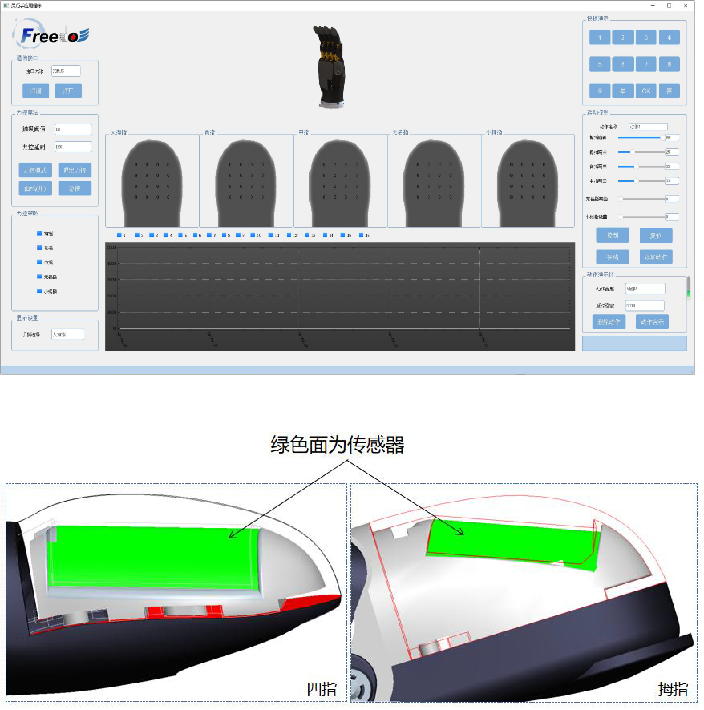
指尖触觉传感器设计上下面电极为“五横五纵”形式,从而将整块压敏材料自动分割成4×4矩阵形式具有16个阵列点,即16个压阻单元,灵巧手手指传感器实物抓取中实时返馈。通过算法实现触感知能力。
使五指灵巧手可以智能完成大部分的人体手部抓取动作。除了开启抓取和操作任务的全新领域之外,该五指灵巧手还为在五指机械手的常用手势基础上进行人与机器人的交流开创了无限可能。主要应用于各高校、科研研究所、高科技公司以及残疾人假肢手应用等行业的深度研究和开发融合。

一、5指设计
五指灵巧手采用5 指设计,连杆传动的方式
二、6自由度
拇指2 个自由度,其余手指各1 个自由度,
三、触觉反馈
指尖配置多阵列触觉传感器,通过算法可以实时感知抓握力度。
四、支持多种通信接口
支持USB、蓝牙、WIFI等多种通信。

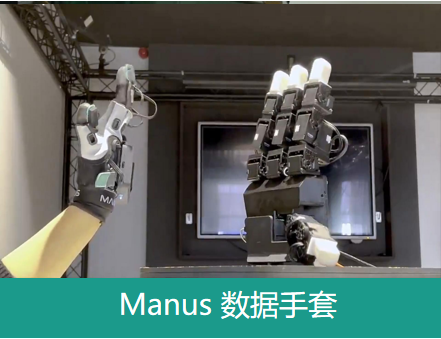
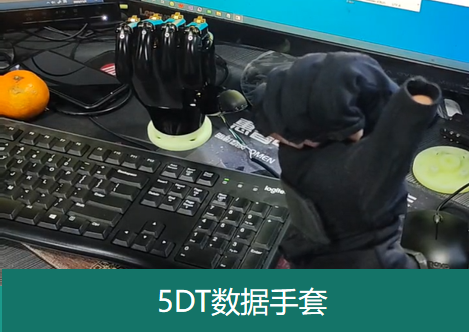
数据手套与机械手的遥操作应用是机器人技术、人机交互技术等领域的一个重要研究方向。这种应用通过数据手套捕捉人手的运动信息,并将其作为控制指令来远程操控机械手,同时实现机械手的感觉反馈,从而增强人与机器人之间的交互体验。五指触感灵巧手支持多个品牌的数据手套如Manus、5DT、SenseGlove等。
目前我们灵巧手已参与国内50多家高校和科研团队灵巧手相关合作,2024年,团队将继续保持利他合作模式,将行业优势和技术服务优势发挥到位,与更多的高校和机构进行更深合作,长期共赢,共同进步。