从自动化到智能化的研究
人类对世界的认识是从时间、空间规律开始的,这些规律蕴含了各种力量及其关系的存在。通常情况下,事实本身往往不会直接告诉我们什么是正确的什么是错误的,没有明确的概念,量得分析是毫无意义的。然而,人们在处理各种客观时空矛盾时,常常会不自觉地忽略了主观价值的关涉问题,从而造成在涉及有人或模拟人参与的系统中或力不从心或南辕北辙,鉴于此,本文将从事实与价值结合的角度重新审视自动化与智能化系统的基本规律。
一、自动化存在的问题
传统的自动化领域涉及老三论,即控制论、信息论和系统论。
1943年罗森勃吕特和维纳的哲学论文《Behaviour, purpose and teleology》(行动、目的和目的论)是控制论萌芽的重要标志,奠定了控制论中反馈思想的雏型,该文的中心思想是:控制行为是一个从原因到目的之间的随机试探和反复调节的曲折过程。控制论通过信息和反馈建立了工程技术与生命科学和社会科学之间的联系。控制论中的信息输入、处理、输出、反馈一般是以客观事实性数据、模型、统计为基础的,因而在科技、工程领域使用效果较好,而在涉及主观价值的社会、经济领域使用效果不佳。
1948年10月香农的论文《A Mathematical Theory of Communication》(通信的数学理论)成为现代信息论研究的开端。在该文中,香农给出了信息熵(以下简称为“熵”)的定义:
这一定义可以用来推算传递经二进制编码后的原信息所需的信道带宽,熵度量的是消息中所含的信息量。实际上,信息熵完成的是信息数量多少的度量,而对于(不同发出/接收者)信息质量的好坏还没有度量。
1932年L.V.贝塔朗菲发表“抗体系统论”,提出了系统论的思想。目前,系统论运用完整性、集中性、等级结构、终极性、逻辑同构等概念,研究适用于一切综合系统或子系统的模式、原则和规律,并力图对其结构和功能进行数学描述。对于包含人的复杂系统处理还很不理想。
总之,对于自动化领域老三论(控制论、信息论和系统论)而言,缺乏价值反馈、价值度量、价值体现已成为进一步发展的瓶颈和挑战,为此我们将尝试在人机环境系统工程中建立新三论。
二、智能化存在的问题
一般而言,传统自动化系统的典型特征是具有相对确定性的输入、处理、输出和反馈,以保持整个系统的鲁棒性、稳定性和可解释性,而智能化系统的输入、处理、输出、反馈各环节相对不确定(但利己),人工智能水平则处于自动化与智能化两者之间。
当前,智能化研究主要仍以人为本进行符号、连接、行为进行分析与模拟,取得了不少成绩(如阿尔法系列产品),但也出现了许多困难和不足,还远远没有达到人们的期望和要求,究其因,其核心仍试图以还原论的思想破解智能的机理或应用,还没有从根本上理解智能产生的机制原理及应用的规律。
与机器智能相较而言,人类的智能向来不是孤立的,而是人物环境交互产生的。真正的智能可以计算,但单纯的计算是不能产生智能的,智能的基本逻辑是比较,而不是计算。
智能不但涉及科学、技术、数学等领域,而且还涉及人文、艺术、社会等方面,准确地说,智能是复杂事物,包括西方性复杂与东方性复杂。智能里面包含着唯物和唯心,既有客观事实又有主观意识,既有机械惯性也有灵活辩证,既有因果必然还有比较自由,既有逻辑推理共有直觉感悟。把智能看成是数据、信息、知识、算法、算力等是危险的,真实的智能不但能够学习、生产、使用、维护、升级这些事物,而且还可以扭曲、异化、诡诈、变易这些概念或机制机理。
智能化不是信息化、数字化、自动化的简单延伸、扩展,而是一种与后三者大不相同的新型范式,智能不仅要掌握已知的信息/学习已有的知识,更重要的是还要生成有价值的信息、知识及有效地使用协调这些信息和知识,是理性逻辑推理与感性超逻辑判断的统一。
针对当前智能化研究的上述问题,我们尝试提出结合东西方思维,从人类具身、离身、反身的态势感知角度解决智能化建模难题。
三、西方还原理性与东方感性系统思想的融合
把智能看成逻辑,把智能看成计算,这两个错误是制约智能发展的瓶颈和误区。
世界是复杂的,复杂性的世界并不都是科学和计算,而是科学与非科学、理性与感性融合的人物环境系统,智能是自然与人工的结合,准确地说,依目前的数理、物理水平,通过编写计算机程序是不可能实现人类水平的智能的,人工智能是不可能真正理解世界的,必须另辟蹊径。我们尝试根据东西方文明的特点及现有计算及认知领域成果,提出计算计模型,针对复杂、多域、动态的环境,研究人机混合下的态势感知模型,探索人-机-环境对决策的影响。进一步构建基于理性和感性混合驱动的计算计模型,实现人机混合智能决策。完成智能领域的理论创新、模型创新、方法创新与平台创新,为未来智能研究提供方法和理论基础。爱因斯坦曾这样描述逻辑与想象(感性)的差异:“Logic will get you from A to B,Imagination will take you everywhere”,其实,人最大的特点就是能根据特定情境把逻辑与想象、具象与抽象进行有目的的弥聚融合。这种灵活弹性的弥散聚合机制往往与任务情境紧密相关。
休谟之问是指休谟1711年在其名著《人性论》里面提出来的一个问题:从“是”(Being)中能否推出“应该”(Should)来,即从客观事实里能否推出主观价值。这个问题在西方近代哲学史上占有重要地位,在他之后许多著名哲学家纷纷介入,但终未有效破解。在两千多年前的东方,孟子在《告子上》一书中就说过:是非之心,智也。智能的任务就是要打开科技与、或、非门的狭隘,比如大与、小与,大或、小或,大非、小非……大是(being)、大应(should)、小是(being)、小应(should)穿透各种非家族相似性的壁垒,用未来的想象(预期)和当前的感受(如同情、共感、同理心、信任等)影响智能领域的走势。
智能系统中的算计就是人类没有数学模型的计算,智能计算中的“与或非”逻辑,大家比较熟悉了,就不再多赘述;算计中的逻辑不妨称之为“是非应”,其中“是”偏同化、“非”侧顺应、“应”为平衡,当遇到未知问题时,先用“是”、再用“非”、后用“应”。大是大非时,大是不动,先试小非,再试中非,若不行,大非不动,先试小是,再试中是,这些试的过程就是“中”的平衡。“应”就是不断尝试、调整、平衡。以上就是计算与算计结合的新逻辑体系,算计逻辑把握价值情感方向,计算逻辑细化事实理性过程。智能走向未来,没有新逻辑出现或许就会没有灵魂。
智能的核心问题为:是不是+该不该+好不好的混杂组合问题。其中“是不是”属于客观事实性逻辑计算问题,“该不该”属于主观价值性判定算计问题,“好不好”属于主客观混合性决策计算计问题。当前大家思考智能大都处在做“是不是”(0、1)的逻辑可计算部分,对于主观价值的可判定性及两者的混合计算-算计(计算计)还未有好办法解决。
西方现代物理学有两大支柱理论:一是爱因斯坦的相对论,它从大尺度上解释了宇宙,如恒星,星系,星系团以及比它们更大的宇宙自身的膨胀的现象提供了理论框架;二是量子力学,它从小尺度上解释了分子、原子以及比原子更小的粒子,比如电子和夸克的存在提供了理论框架。量子力学是由许多科学家,包括普朗克、海森堡、波尔、薛定谔等人共同提出。但这两个理论却有一个共同之处,就是都是通过算计而产生的计算体系,还有大家熟知的数学四次危机及其化解也是如此吧。
东方智慧既有数学的成分也有非数学的成分,东方智慧不是单纯的智能计算,而是智能化,重点在“化”,即算计。算计是人类带有动因的理性与感性混合盘算,是已有逻辑形式与未知逻辑形式的融合筹划。比如毛主席打仗很少输过,因为他在战略(算计)上从不犯低级错误,不会在敌人(算计)选择的时间、敌人选择的地点,以敌人希望的方式开战。
元是认知之始的元素。一元为being,多元为should,除了多元之外,还有变元,随机应变的元。多元认知如何形成一元认知的?即人们是如何把多种逻辑压入到一次逻辑推理过程中的呢?这是智能领域的研究关键,也是未来科幻需要破解的难题!随之会衍生出了这样一些问题:人们是如何把多种态、势压入到智能系统中的态、势、感、知过程中的呢?人们是如何把多种科学事实计算压入到一次智能系统计算计过程中的呢?
在西方科技发展的历史长河中,第一次数学危机称为毕达哥拉斯悖论(信奉“万物皆数”的信条,号称任何线段长度都可表示为两个自然数之比,毕达哥拉斯悖论是希帕索斯发现的,他发现了直角边长为1的等腰直角三角形斜边长度不是自然数之比。)、第二次数学危机称为贝克莱悖论(1734年爱尔兰主教贝克莱提出:在牛顿和莱布尼茨求导数过程中,dx 既是0又不是0,这就是贝克莱悖论。)、第三次数学危机称为罗素悖论(集合R本身既是R的元素,又不是 R的元素。)。
这三次危机的一致性在于“是”与“不是”的悖论,与量子物理的“猫”一样,与文学的“to be or not to be”相似,与东方思想中的“是非之心”相关,与经济行为中的“A与非A”异曲同工。“是”与“不是”即为一元,其相互间的转化即为变元,其衍生出的“应”即为多元。如A是一元,A转化为B是变元,A应为B或C或D……为多元。逻辑压缩、人与隐形系统、计算-算计(计算计)依然成为未来科幻领域的研究重点和难点。计算涉及事实性人机环境系统(事图)问题,算计则更多涉及价值性人机环境系统(意图)问题,而事实与价值常常会出现不一致甚至是矛盾,计算计就是各种事实、价值的混合性人机环境系统问题,而且不同粒度的计算计模型是不同的。如何说计算中含有贝叶斯(结论随新数据的输入而改变),那么算计就涉及锚定论(结论很难随着新数据的输入而改变),智能领域也许就是一个典型的科技与艺术的计算计案例。
算计是人类不借助机器的跨域多源异构系统的复杂“计算”过程。某种意义或程度上,算计就是观演一体化、“存算一体化”这两个“神经形态”过程的交互平衡,观(存)就是拉大尺度或颗粒的非实时top-down过程,演(算)就是小尺度细颗粒实时bottom-up过程。
从东方角度而言,人机混合智能是观演同在的技艺术(艺术+技术)形式,它至少包含三层意思。第一层,人机混合必须是(人主)艺术的,但又不是真实艺术的,它是用(机器)技术语言再创造出的智能,它是艺术意念的技术化;第二层,创造出艺术性的目的,是要呈现智能的美;而这个智能的美,就蕴藏着人机智能的第三层意思:人机混合智能是人的艺术与机器技术的混合,它是观演同在的技艺术。因而,人机混合智能在观演关系中生成带有主观性、想象性的美,以及虚实相生、无中生有的真。
如何把算计嵌入到多源异构计算的弥(散)聚(合)中去?如何实现不同颗粒度中(状)态的积分、(趋)势的微分、感(觉)的连续、知(觉)的离散呢?计算能够解决不少“态”的可计算问题,而要真正解决“势”的可判定问题则需要人类的算计。例如查尔斯·达尔文在用自然选择阐述他的进化论时,根本就没用到数学。同样,当阿尔弗雷德·魏格纳首次描述板块漂移理论时也只是用语言表述的。当然,索维尔所言“理解人类的局限性,是智慧的开端”不无道理,未来新型人机关系最重要的是重构与合作,即随态/势的变化而重构感/知、随感/知的变化而重构态/势,二者由单纯被动的工具使用变为自主积极的合作关系。
数学本身就是一种虚实相间的元宇宙,点线面体都是非真实存在的虚拟概念,大家却用它来近似描述物理世界。从数到图(空间)、力(时间)、能(量)、信息(客观)、智(能),数学模型与物理世界的关系,如同形式逻辑模型与真实世界事物的关系一样,是理想符号关系对事实关系的描摹、刻画,这些"非存在的有”表征主要为三类,一是孙悟空、圣诞老人等想象类(虚拟量),二是爷爷奶奶等逝去先人真实类(物理量),三是艺术处理后的诸葛亮、维特根斯坦等真实想象混合类(加工量)。
自然科学及数学工具本质上是一种主体悬置的态势感知体系,人文艺术常常是一种主体高度参与的态势感知体系,博弈智能涉及到了这两方面,由于主体的实时参与,所以更侧重人文艺术方面。
彭罗斯从歌德尔不完备定理发展了自己的理论,认为人脑有超出公理和正式系统的能力。他在《皇帝新脑》中提出,大脑有某种不依赖于计算法则的额外功能,这是一种非计算过程,不受计算法则驱动;而算法却是大部分物理学的基本属性,计算机必须受计算法则的驱动。对于非计算过程,量子波在某个位置的坍塌,决定了位置的随机选择。波函数塌缩的随机性,不受算法的限制。
人脑与电脑的根本差别,可能是量子力学不确定性和复杂非线形系统的混沌作用共同造成的。人脑包含了非确定性的自然形成的神经网络系统,具有电脑不具备的“直觉”,正是这种系统的“模糊”处理能力和效率极高的表现。而传统的图灵机则是确定性的串行处理系统,虽然也可以模拟这样的“模糊”处理,但是效率太低下了。而正在研究中的量子计算机和计算机神经网络系统才真正有希望解决这样的问题,达到人脑的能力。
彭罗斯认为,客观还原所代表的既不是随机,也不是大部分物理所依赖的算法过程,而是非计算的,受时空几何基本层面的影响,在此之上产生了计算和意识。非存在的有表现为三类,一是孙悟空、圣诞老人等想象类,二是爷爷奶奶等逝去先人真实类,三是艺术加工后的诸葛亮、维特根斯坦等真实想象混合类。
爱因斯坦所说的“时间和空间是人们认知的一种错觉”,即时间和空间只是人们对于事物发展顺序和物体间相互关系的一种抽象概念,在人们从日常经验总结出的观念中,时间和空间是绝对的、可度量的,而相对论揭示出时空的相对性和二者间的联系。我们认为不变的时间和空间都会随物体的运动、物质能量的分布而变化。
在态势感知中,态涉及物理、心理、管理等参数状态(主态、客态),势是有效态的变化方向,感是接受的各种数据刺激,知是建立起的各种联系。用态势的转化比值“态/势”确定有效态的大小,有效态变化的速度很重要。态势感知涉及计算-算计系统。事实态不能产生势,价值态能够产生势。如何快速识别出或尝试出价值态将变得十分关键,有经验方面的,有情感方面的,有测试方面的,也有对环境认知方面的。
数理的物理域、心理的认知域、管理的信息域、情理的社会域中的时间空间同样会发生各种变化,我们不妨称之为基于事实-价值体系的虚拟-现实时空态势感知维度。共分为现实时空的xyzt+虚拟时空的xyzt+事实时空xzyt+价值时空xyzt,抑或它们之间的各种组合及参照系变换(如虚拟价值时空、现实事实时空、虚拟事实时空、现实价值时空)。
不同维度里的态、势、感、知不尽相同,所以常常会发生虚拟时空维度里的态对不准现实时空维度的势(如想象情景与实践情境不一致),事实时空维度里的态对不准价值时空维度的势(如物理场景与任务意图不一致),所以常常出现各种有“态”无“势”现象。
智能是在人与物、环境的交互中逐步形成的,一方面,我们的认知总是在与这个世界发生着融合;另一方面,被误用的计算却也可能会影响我们的认知。1968年图灵奖获得者理查德·哈明就曾一语中的地认识到:“计算的目的不在于数据,而在于洞察事物。”,这里的洞察就包含着对未来的预测与算计。人类的洞察机制不是一维的具身认知,还常常涉及二维的离身认知、三维(以上)的反身认知及其混合认知机理。
四、离身、具身、反身认知
传统 认知理论认为,认知的本质是在人脑中发生的类似于计算机的计算过程,其功能独立于环境且与身体无关,因此被称为“离身认知”(如联结主义、符号主义)。但随着研究的进展,心理学家发现,认知在很大程度上依赖着身体。身体的构造、神经的结构、感官和运动系统的活动方式决定了人类认识世界的风格和方式。认知和身体都嵌入环境,共同构成一个动态的统一体。这就是被称为第二代认知科学的“具身认知”。具身认知理论认为,个体的认知过程和自我意识都与具身活动密不可分,身体的自由度影响感知判断。
具身认知(Embodied cognition),也称“具体化”(embodiment)主要指生理体验与心理状态之间有着强烈的联系。生理体验“激活”心理感觉,反之亦然。例如,人在开心的时候会微笑,而如果微笑,人也会趋向于变得更开心的行为主义。
反身认知就是在军事、政治、经济等领域有自我加强的一种现象,这种现象直到最后的快速调整而结束。反身认知认为参入者的思维与参入的情景之间相互联系与影响,彼此无法独立,认知与参入处于永远的变化过程之中。参入者的偏向以及认知的不完备性造成了均衡点遥不可及,趋势也只是不断的朝着目标移动,参入者的思维直接影响参入的情景,往往造成诸多的不确定性。反身认知一般强调博弈过程中的人机环境系统之间的激发联动效应,能够跨越物理域、信息域、认知域等。
“离身”状态是一种“观看”,即把它当作一个需要被认知的对象,可以发现它的形状、质地、颜色等等属性或特征;“具身”则是“使用”,在被用起来的时候,它并不构成我的对象,而是融入了活的“事件”之中。前者是“现成在手状态”,二维的意向(他),后者是“当下上手状态”,一维的意向(我)。只有处在后一状态,也就是说在实际的使用中,一件事物才真正成为其自身,从而获得其本真的存在,而丧失的却恰恰是它的对象性。“反身”更是把“观看”、“使用”、“评价”、“反思”等连贯起来,三维的意向(你我他),形成“态”、“势”、“感”、“知”的综合化、有机化。
Mica R. Endsley在1988年国际人因工程(Human Factor)年会上提出了有关态势感知(Situation Awareness,SA)的一个共识概念:“…the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.”(就是在一定的时间和空间内对环境中的各组成成分的感知、理解,进而预知这些成分的随后变化状况”)。
我们的深度态势感知含义是“对态势感知的感知,是一种人机智慧,既包括了人的智慧,也融合了机器的智能(人工智能)”, 是能指+所指,既涉及事物的属性(能指、感觉)又关联它们之间的关系(所指、知觉),既能够理解弦外之音,也能够明白言外之意。它是在Endsley以主体态势感知(包括信息输入、处理、输出环节)的基础上,分为“态”、“势”、“感”、“知”四个环节,包括人、机(物)、环境(自然、社会)及其相互关系的整体系统趋势分析,具有“软(价值)/硬(事实)”两种调节反馈机制;既包括自组织、自适应,也包括他组织、互适应;既包括局部的定量计算预测,也包括全局的定性算计评估,是一种具有自主、自动弥聚效应的信息修正、补偿的期望-选择-预测-控制体系。
智能的逻辑既不同于理性的逻辑也不同于感性的逻辑,而是两者的结合,如何有效的简化这种结合呢?我们准备尝试从态势感知这个角度入手,使“离身”、“具身”、“反身”认知形成整体,进而建立起智能的计算-算计体系。
五、计算-算计智能模型的框架
要做一个自己相信的智能系统很难,要做一个别人相信的智能更难。目前,人工智能系统已经广泛应用于诸多领域,部分实现了代替人做决策的过程。但现实中的人工智能方法局限于相对“确定性、完全信息、受限环境、可解释性差”的约束,不能满足复杂环境决策的要求。在真实复杂的不确定因素、非完全信息、开放环境中,人类的经验、直觉、灵感与人工智能系统的高效、精确具有合作互补的巨大潜力。
人机之间、态势之间、感知之间、计算与算计之间常常具有非互惠作用现象,即作用力不等于反作用力,如何量化分析这些等价的相互作用呢?并且,现有的逻辑体系很难判断处理各种意外,如塞翁失马的大逻辑与刻舟求剑的小逻辑。现阶段的人机交互很难实现人机之间的有机融合,仍处于相对简单的低级水平,难点之一就在于价值意向性的形式化。鉴于机器只有局部性事实逻辑,没有人类的整体性价值逻辑,我们可以尝试把人机结合起来进行功能与能力的互补,用人类的算计这把利刃穿透机器计算不时遇到的各种各样的“墙”。
时下的人工智能系统之所以还远远不能达到人们的期望,其根本原因在于构造人工智能的基础是当代数学而不是真正的智能逻辑,首先数学不是逻辑,从数到图再到集合,从算数到微积分到范畴论无一不是建立在公理基础上的数理逻辑体系,而真正的智能逻辑既包括数理逻辑也包括辩证逻辑,还包括未发现的许多逻辑规律,这些还未被发现的逻辑规律既有未来数学的源泉也有真情实感逻辑的涌现,真实智能从不是单纯脑的产物(如狼孩),而是人、物(机器是人造物)、环境相互作用、相互激发唤醒的产物,如一个设计者规划出的智能系统还需要制造者认真理解后的加工实现,更需要使用者因地制宜、有的放矢地灵活应用等等,所以一个好的人机融合智能涉及三者(甚至多者)之间的有效对立统一,既有客观事实(状)态的计算,也有主观价值(趋)势的算计,是一种人、物、环境的深度态势感知系统。而当前的人工智能无论是基于规则(数学模型)的还是基于统计概率(大小数据)的大都是基于计算,而缺乏人类算计的结合与嵌入,进而就远离了智能的真实与灵变。
另外,自然科学及数学等理性工具本质上是一种主体悬置的态势感知体系,人文艺术等感性常常是一种主体高度参与的态势感知体系,智能领域涉及到了这两方面,由于智能主体的实时参与,所以更侧重人文艺术感性方面。与西方理性计算思维相比,东方智慧中既有理性的成分也有感性的成分,东方智慧不是单纯的智能计算,而是智能化,重点在“化”,即算计。算计是人类带有动因的理性与感性混合盘算,是已有逻辑形式与未知逻辑形式的融合筹划。由上所述,我们不难看出,智能中的计算-算计(计算计)问题其实质是东西方智慧的融合与共生。
智能是一种激发唤醒过程,好的智能交互涉及人机环境系统三者之间的和谐对立统一,既有态的计算,也有势的算计。通晓了辩证逻辑的算计才是真正的智能“化”,反映了不确定的确定性,即不确定性的变化率,如人类从位置、速度、加速度中反映出了空间、时间、力,进而又从质量、能量、信息中反映出了虚实、有无、真假。计算与算计有点类似普林斯顿大学心理学家汤姆·格里菲斯(Tom Griffiths)所言:“那些当你拥有大量数据时讲得通的理论,与那些在少量数据下有道理的理论,看起来是完全不同的。”,一个处理各种“大数”理,一个收拾“小数”甚至“无数”道。
我们受笛卡尔数形计算的解析坐标系启示,初步构建了计算-算计的态势感知坐标系,如图1所示。
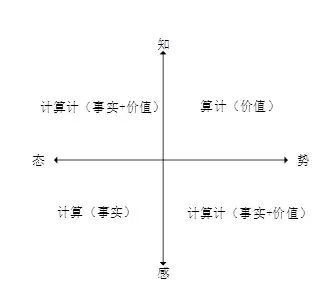
图1计算-算计的态势感知坐标系
状态参数可由环境中的物理参数(时间、地点、人物、事物等)组成“态向量”,并通过不同状态下的状态矩阵计算获得初级的趋势结果1;趋势参数可由期望中的各种价值参数(时间、地点、人物、事物等的价值值)组成“势向量”,并通过不同趋势下的趋势矩阵算计获得次级的趋势结果2;感觉参数可由感觉到的各种参数(时间、地点、人物、事物等)组成“感向量”,并通过不同感觉下的感觉矩阵计算获得初级的知觉结果3;知觉参数可由知觉到的各种经验参数(时间、地点、人物、事物等的经验值)组成“知向量”,并通过不同知觉下的知觉矩阵算计获得次级的知觉结果4;通过这四个结果的计算-算计结果拟合出综合的态势感知结果。
我们可以分别建立起人机环境系统中离身、具身、反身的态势感知模型,再进行最后的融合分析,得出整体系统的计算计结论。
内容介绍
本书是一本探讨人机环境系统相互融合的智能的图书,深入研究了人工智能技术在许多场景中的应用,以及人机环境系统的协同作业和智能化发展。本书主要围绕三个问题展开:人机交互与人机融合智能有何异同?人类的谋算(算计)与计算是可逆的吗?机器智能能够产生谋算(算计)吗?同时,本书还介绍了多种现代技术及其在人机环境系统中的应用,如人工智能、深度态势感知、理性计算、感性算计、情绪 /情感分析等。通过阅读本书,读者可以了解如何利用人机智能技术来提高人机环境系统的整体效能并减少“机器幻觉”,为未来的智慧社会建设奠定基础。
目录
目录
绪论 1
上篇 人机交互
第一章 人机交互概述 11
第一节 人机交互工程的形成和发展 11
第二节 人机交互工程的研究方向 19
第三节 人-机-环境关系发展变迁 25
第四节 人机交互工程学研究的基本原则与研究方法 29
本章参考文献 38
第二章 人机交互中的情境认知 40
第一节 人的感知 40
第二节 人的认知 55
第三节 人的决策 81
第四节 机的决策 84
第五节 情境认知的理论与思考 89
第六节 推荐系统情境决策实验 111
本章参考文献 135
第三章 人机交互中的环境因素 142
第一节 现实环境与虚拟环境 142
第二节 现实世界中的不足 151
第三节 数字世界与现实世界的融合:元宇宙 152
第四节 信息融合 153
本章参考文献 157
下篇 人-机-环境系统智能
第四章 人工智能的起源与发展 161
第一节 智能的本质 161
第二节 智能与意识 165
第三节 人工智能的起源 170
第四节 人工智能的四个发展阶段 172
第五节 人工智能中的逻辑演绎 177
第六节 智能化的隐患 182
本章参考文献 185
第五章 人机智能的分界 191
第一节 人工智能的瓶颈 191
第二节 智能的第一原理 193
第三节 人机融合智能是人工智能未来的发展方向 202
本章参考文献 206
第六章 人机融合决策实例分析 207
第一节 机器决策过程 207
第二节 人类学习过程对机器决策的指导作用 214
第三节 人机融合决策如何建模 220
本章参考文献 223
第七章 人-机-环境系统智能 227
第一节 智能是人、机、环境相互作用的产物 227
第二节 人的智能和机器智能 228
第三节 自主性与人-机-环境系统智能 236
第四节 未来是人-机-环境智能的融合 249
第五节 人机环境系统智能的发展方向与关键问题 254
第六节 人-机-环境系统智能的未来可能性 261
本章参考文献 266
第八章 深度态势感知 273
第一节 深度态势感知的理论之源 273
第二节 深度态势感知的概念 275
第三节 主/被动态势感知 279
第四节 基于深度态势感知的用户画像案例 282
第五节 基于深度态势感知的军事智能 291
第六节 论态势感知中的有态无势 312
本章参考文献 315
第九章 人-机-环境系统智能中的计算计 320
第一节 计算与算计 320
第二节 计算—算计的模型 331
第三节 变通、趣时与知几 340
第四节 计算计的内涵与外延 343
第五节 智学:非存在的有 351
本章参考文献 354
第十章 人-机-环境系统智能中的情感与信任问题 356
第一节 情绪交互与情感化设计 356
第二节 动态双向情绪传递模型及其关键技术 362
第三节 情绪对决策的两面性影响 368
第四节 人-自主系统团队的情感与信任 370
第五节 信任的定义与溯源 372
第六节 人-机-环境融合系统的信任校准 377
第七节 人工智能可解释技术 379
本章参考文献 384
第十一章 新信息、新控制与新系统 390
第一节 智能化不是信息化/数字化的简单升级 391
第二节 智能的再认识 395
第三节 跨域的计算计小对话 403
第四节 新信息与新控制中计算计的理解及概略模型 404
第五节 新系统概念是个超三体的问题,也是一个计算计
问题 407
第六节 智能是一个非常辽阔的空间 409
第七节 寻找智能的基础理论可能需要另辟蹊径 412
第八节 认知与向善 416
第九节 人机环境系统对信息论、控制论、系统论的拓展
与整合 420
后记 426