YOLOv8+Deepsort+PyQt+GUI 语义分割+目标检测+姿态识别 三者合一(集成于一套系统)综合视觉分析系统
综合视觉分析系统
技术栈:
- YOLOv8:用于目标检测,是一个快速且准确的目标检测框架。
- DeepSORT:用于目标跟踪,结合了深度学习特征提取和卡尔曼滤波器来预测目标轨迹。
- GUI:提供一个直观易用的图形用户界面,使得非技术用户也能方便地使用该系统。
- 语义分割:通过YOLOv8或其他语义分割算法,可以区分图像中的不同区域或对象,并赋予它们特定的标签。
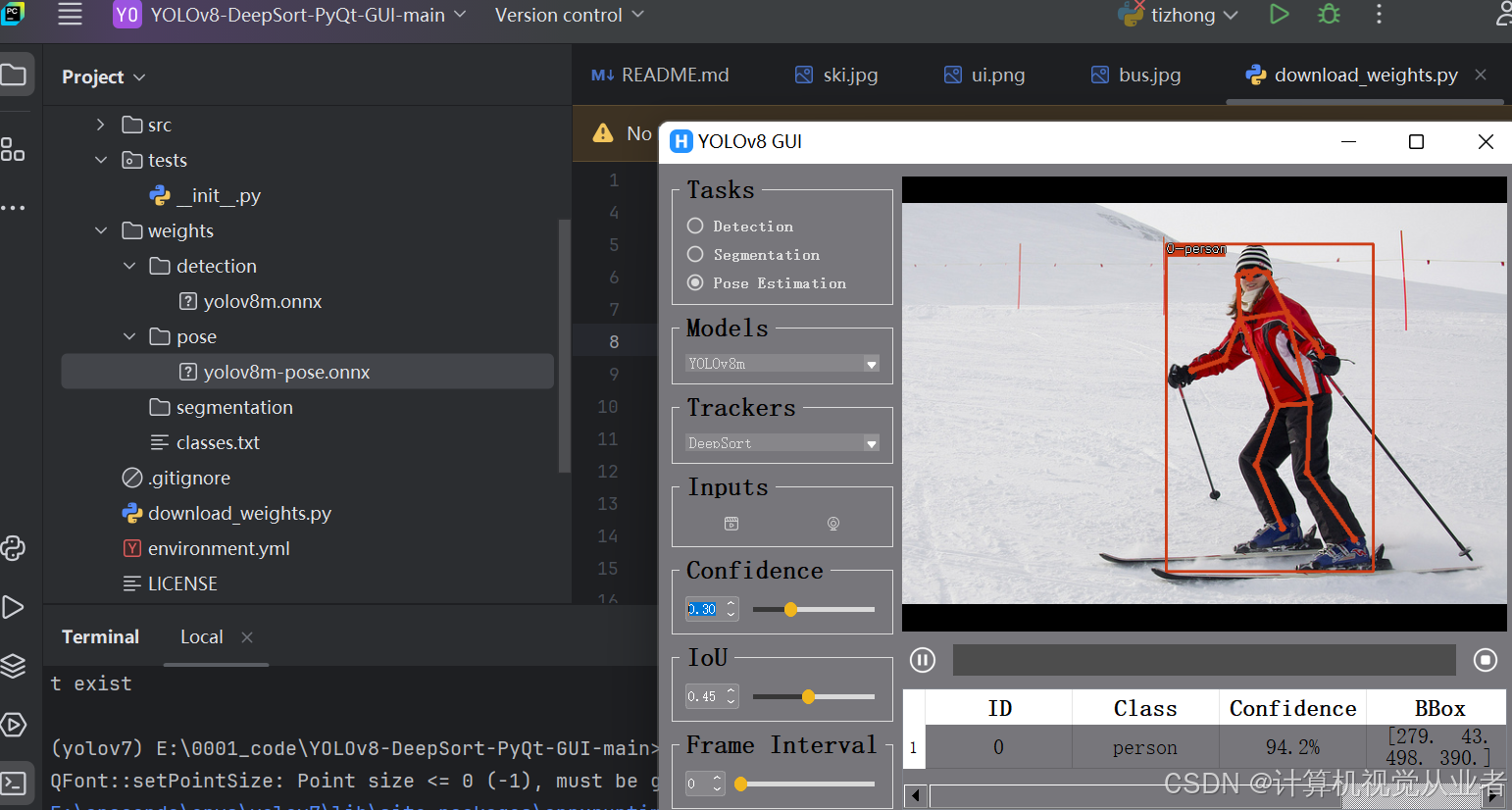
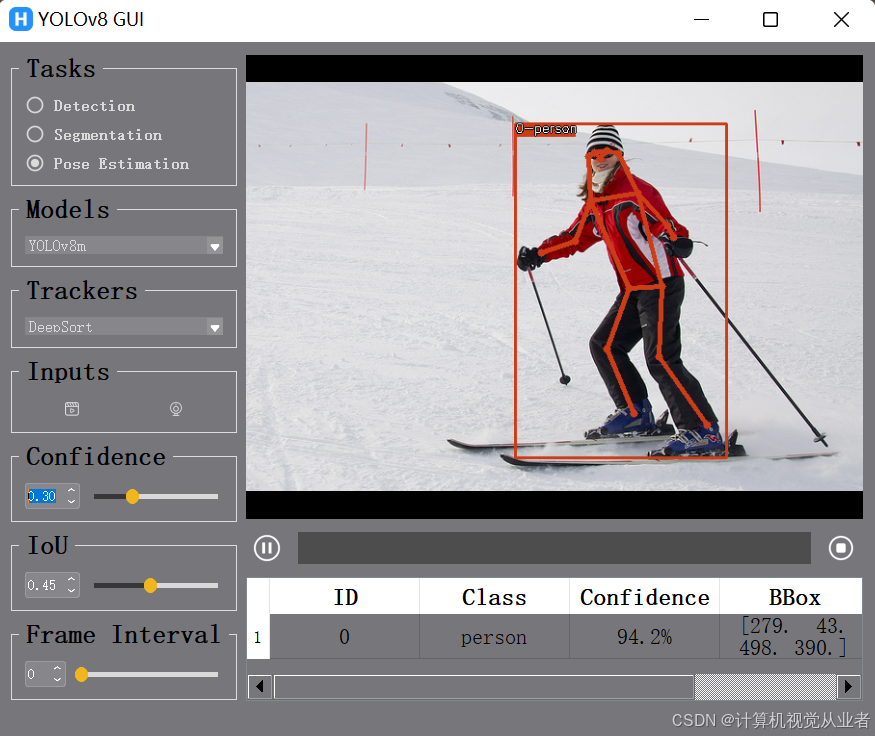
- 姿态识别:利用深度学习模型来识别物体或人体的姿态,如关键点的位置等。
功能描述:
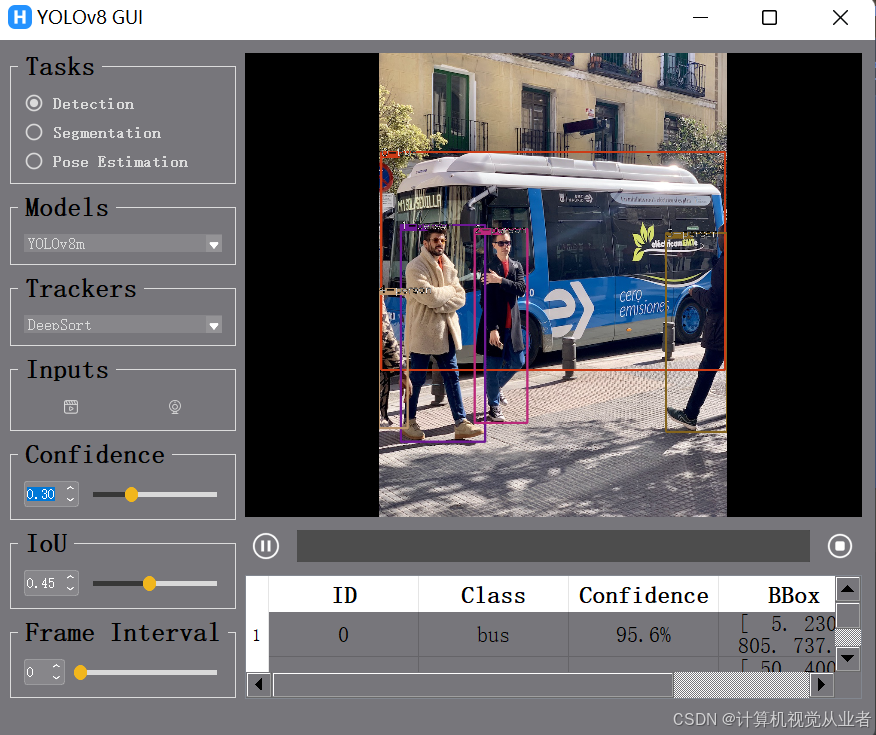
- 目标检测与分类:系统能够识别视频或图像中的特定对象,并对其进行分类。
- 目标跟踪:使用DeepSORT算法,可以在连续的视频帧中持续跟踪已识别的对象。
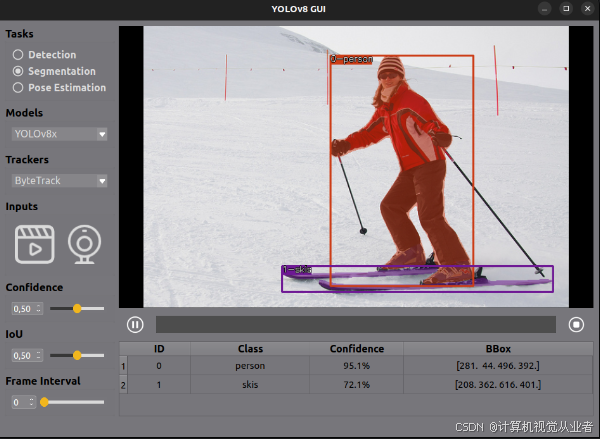
- 语义分割:系统不仅限于检测对象边界框,还能区分图像的不同部分,例如船只及其背景。
- 姿态识别:能够识别目标对象的姿态,对于人形目标来说,可以检测出肢体的关键点位置,对于其他类型的目标,则可以根据应用场景定制姿态识别功能。
- 实时展示与交互:通过GUI,用户可以实时查看处理结果,并与系统进行交互,比如调整参数、保存结果等。
应用场景:
- 安全监控:在机场、车站等人流密集场所,帮助识别异常行为或可疑人物。
- 智能交通管理:监控道路情况,识别车辆、行人等,并进行交通流量管理。
- 工业自动化:在生产线上,用于质量控制,识别产品缺陷。
- 无人机监控:在海上或空中,用于船只或飞行物的自动识别与跟踪。
优势:
- 高效性:由于采用了先进的深度学习模型,系统能够以较高的帧率处理视频数据。
- 准确性:通过优化后的模型,系统能更准确地区分不同的对象和背景。
- 易用性:图形用户界面使得配置和操作变得简单,降低了用户的使用门槛。
这样的系统可以为多种行业提供强大的视觉分析能力,具有广泛的应用前景。
姿态识别:
关键代码:
main.py
from src.qt.stream.video_capture import CameraCaptureThread
from src.qt.stream.visualize import VideoVisualizationThread
from src.qt.stream.ai_worker import AiWorkerThread
from src.ui.main_window import Ui_MainWindow
from src.qt.video.video_worker import FileProcessThread
from PyQt5 import QtGui, QtWidgets
from PyQt5.QtCore import Qt
import sys
import numpy as np
import cv2 as cv
class MainWindow(QtWidgets.QMainWindow, Ui_MainWindow):
def __init__(self, parent=None):
super(MainWindow, self).__init__(parent)
self.setupUi(self)
self.ai_thread = AiWorkerThread()
self.camera_thread = CameraCaptureThread()
self.display_thread = VideoVisualizationThread()
self.file_process_thread = FileProcessThread()
self.conf_thr = 0.3
self.iou_thr = 0.45
self.frame_interval = 0
self.model_name = "yolov8n"
self.ai_task = "object_detection"
self.tracker_name = "deepsort"
self.init_slots()
self.buttons_states("waiting_for_setting")
def init_slots(self):
self.radioButton_det.toggled.connect(lambda: self.get_ai_task(self.radioButton_det))
self.radioButton_pose.toggled.connect(lambda: self.get_ai_task(self.radioButton_pose))
self.radioButton_seg.toggled.connect(lambda: self.get_ai_task(self.radioButton_seg))
self.doubleSpinBox_conf.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_conf'))
self.doubleSpinBox_interval.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_interval'))
self.doubleSpinBox_iou.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_iou'))
self.horizontalSlider_conf.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_conf'))
self.horizontalSlider_interval.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_interval'))
self.horizontalSlider_iou.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_iou'))
self.comboBox_model.currentTextChanged.connect(self.choose_model)
self.comboBox_tracker.currentTextChanged.connect(self.choose_tracker)
self.pushButton_cam.clicked.connect(self.process_camera)
self.pushButton_file.clicked.connect(self.process_file)
self.pushButton_stop.clicked.connect(self.stop_video)
self.pushButton_play.clicked.connect(self.file_process_thread.toggle_play_pause)
def resizeEvent(self, event:QtGui.QResizeEvent):
self.screen_size = (self.label_display.width(), self.label_display.height())
self.display_thread.get_screen_size(self.screen_size)
self.file_process_thread.get_screen_size(self.screen_size)
QtWidgets.QMainWindow.resizeEvent(self, event)
def update_parameter(self, x, flag):
if flag == 'doubleSpinBox_conf':
self.horizontalSlider_conf.setValue(int(x*100))
self.conf_thr = float(x)
elif flag == 'doubleSpinBox_interval':
self.horizontalSlider_interval.setValue(int(x))
self.frame_interval = int(x)
self.file_process_thread.set_frame_interval(self.frame_interval)
elif flag == 'doubleSpinBox_iou':
self.horizontalSlider_iou.setValue(int(x*100))
self.iou_thr = float(x)
elif flag == 'horizontalSlider_conf':
self.doubleSpinBox_conf.setValue(x/100)
self.conf_thr = float(x/100)
elif flag == 'horizontalSlider_interval':
self.doubleSpinBox_interval.setValue(x)
self.frame_interval = int(x)
self.file_process_thread.set_frame_interval(self.frame_interval)
elif flag == 'horizontalSlider_iou':
self.doubleSpinBox_iou.setValue(x/100)
self.iou_thr = float(x/100)
if self.ai_thread.isRunning:
self.ai_thread.set_confidence_threshold(self.conf_thr)
self.ai_thread.set_iou_threshold(self.iou_thr)
if self.file_process_thread.isRunning:
self.file_process_thread.set_confidence_threshold(self.conf_thr)
self.file_process_thread.set_iou_threshold(self.iou_thr)
def get_ai_task(self, btn):
if btn.text() == 'Detection':
if btn.isChecked() == True:
self.ai_task = "object_detection"
elif btn.text() == 'Pose Estimation':
if btn.isChecked() == True:
self.ai_task = "pose_detection"
elif btn.text() == 'Segmentation':
if btn.isChecked() == True:
self.ai_task = "segmentation"
def choose_model(self):
self.model_name = self.comboBox_model.currentText()
self.model_name = self.model_name.lower()
def choose_tracker(self):
self.tracker_name = self.comboBox_tracker.currentText()
self.tracker_name = self.tracker_name.lower()
def buttons_states(self, work_state):
if work_state == "waiting_for_setting":
self.radioButton_det.setDisabled(False)
self.radioButton_pose.setDisabled(False)
self.radioButton_seg.setDisabled(False)
self.comboBox_model.setDisabled(False)
self.comboBox_tracker.setDisabled(False)
self.pushButton_cam.setDisabled(False)
self.pushButton_file.setDisabled(False)
self.pushButton_play.setDisabled(True)
self.pushButton_stop.setDisabled(True)
self.doubleSpinBox_conf.setDisabled(False)
self.horizontalSlider_conf.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(False)
self.horizontalSlider_interval.setDisabled(False)
self.doubleSpinBox_iou.setDisabled(False)
self.horizontalSlider_iou.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(False)
self.horizontalSlider_interval.setDisabled(False)
elif work_state == "processing_on_camera":
self.pushButton_play.click
self.radioButton_det.setDisabled(True)
self.radioButton_pose.setDisabled(True)
self.radioButton_seg.setDisabled(True)
self.comboBox_model.setDisabled(True)
self.comboBox_tracker.setDisabled(True)
self.pushButton_cam.setDisabled(True)
self.pushButton_file.setDisabled(True)
self.pushButton_play.setDisabled(True)
self.pushButton_stop.setDisabled(False)
self.doubleSpinBox_conf.setDisabled(False)
self.horizontalSlider_conf.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(True)
self.horizontalSlider_interval.setDisabled(False)
self.doubleSpinBox_iou.setDisabled(False)
self.horizontalSlider_iou.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(True)
self.horizontalSlider_interval.setDisabled(True)
elif work_state == "processing_on_file":
self.radioButton_det.setDisabled(True)
self.radioButton_pose.setDisabled(True)
self.radioButton_seg.setDisabled(True)
self.comboBox_model.setDisabled(True)
self.comboBox_tracker.setDisabled(True)
self.pushButton_cam.setDisabled(True)
self.pushButton_file.setDisabled(True)
self.pushButton_play.setDisabled(False)
self.pushButton_stop.setDisabled(False)
self.doubleSpinBox_conf.setDisabled(False)
self.horizontalSlider_conf.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(False)
self.horizontalSlider_interval.setDisabled(False)
self.doubleSpinBox_iou.setDisabled(False)
self.horizontalSlider_iou.setDisabled(False)
self.doubleSpinBox_interval.setDisabled(False)
self.horizontalSlider_interval.setDisabled(False)
def process_camera(self):
video_source = self.get_stream_source()
print("SOURCE", video_source)
if video_source is not None:
self.ai_thread.set_start_config(
ai_task=self.ai_task,
model_name=self.model_name,
tracker_name=self.tracker_name)
self.camera_thread.set_start_config(video_source=video_source)
self.display_thread.set_start_config([self.label_display.width(),self.label_display.height()])
self.camera_thread.send_frame.connect(self.display_thread.get_fresh_frame)
self.camera_thread.send_frame.connect(self.ai_thread.get_frame)
self.ai_thread.send_ai_output.connect(self.display_thread.get_ai_output)
self.display_thread.send_displayable_frame.connect(self.update_display_frame)
self.display_thread.send_ai_output.connect(self.update_statistic_table)
self.display_thread.send_thread_start_stop_flag.connect(self.buttons_states)
self.ai_thread.start()
self.display_thread.start()
self.camera_thread.start()
def process_file(self):
img_fm = (".tif", ".tiff", ".jpg", ".jpeg", ".gif", ".png", ".eps", ".raw", ".cr2", ".nef", ".orf", ".sr2", ".bmp", ".ppm", ".heif")
vid_fm = (".flv", ".avi", ".mp4", ".3gp", ".mov", ".webm", ".ogg", ".qt", ".avchd")
file_list = " *".join(img_fm+vid_fm)
file_name, _ = QtWidgets.QFileDialog.getOpenFileName(self, "choose an image or video file", "./data", f"Files({file_list})")
if file_name:
self.file_process_thread.set_start_config(
video_path=file_name,
ai_task=self.ai_task,
screen_size=[self.label_display.width(),self.label_display.height()],
model_name=self.model_name,
tracker_name=self.tracker_name,
confidence_threshold=self.conf_thr,
iou_threshold=self.iou_thr,
frame_interval=self.frame_interval)
self.file_process_thread.send_ai_output.connect(self.update_statistic_table)
self.file_process_thread.send_display_frame.connect(self.update_display_frame)
self.file_process_thread.send_play_progress.connect(self.progressBar_play.setValue)
self.file_process_thread.send_thread_start_finish_flag.connect(self.buttons_states)
self.file_process_thread.start()
def stop_video(self):
self.display_thread.stop_display()
self.ai_thread.stop_process()
self.camera_thread.stop_capture()
self.file_process_thread.stop_process()
def update_display_frame(self, showImage):
self.label_display.setPixmap(QtGui.QPixmap.fromImage(showImage))
def clean_table(self):
while (self.tableWidget_results.rowCount() > 0):
self.tableWidget_results.removeRow(0)
def update_statistic_table(self, ai_output):
self.clean_table()
self.tableWidget_results.setRowCount(0)
if ai_output == []:
return
for box in ai_output:
each_item = [str(box["id"]),str(box["class"]), "{:.1f}%".format(box["confidence"]*100), str(box["bbox"])]
row = self.tableWidget_results.rowCount()
self.tableWidget_results.insertRow(row)
for j in range(len(each_item)):
item = QtWidgets.QTableWidgetItem(str(each_item[j]))
item.setTextAlignment(Qt.AlignHCenter | Qt.AlignVCenter)
self.tableWidget_results.setItem(row, j, item)
def get_stream_source(self):
video_source, okPressed = QtWidgets.QInputDialog.getText(self, "Input Camera_ID or RTSP", "Camera ID or RTSP")
if okPressed:
if video_source.isdigit():
return int(video_source)
else:
return video_source
else:
return None
if __name__ == '__main__':
app = QtWidgets.QApplication(sys.argv)
mainWindow = MainWindow()
mainWindow.show()
sys.exit(app.exec_())
目标检测:
语义分割: