先框架后历元还是先历元后框架?
最近测绘同行高总发现了一个问题,《CH/T 2014-2016 大地测量控制点坐标转换技术规范》中”5.1.4.1 a) 不同ITRF间框架转换参数的历元归算“中历元不明确,不知是观测历元还是目标历元。他和一些同行用一些数据测试验证后认为观测历元更为贴合实际。
编辑
高总说的这些实在有点高深,因为我们的工作仅限于历元转换,忽略框架转换。从规范文本来看,框架转换的a)和b)对应我们常说的框架和历元转换,因为历元转换本质就是板块运动改正。根据参考文献2的观点,ITRF框架和历元转换的顺序应该是先历元再框架,即先板块运动修正,再框架修正,因为先框架修正不知道观测历元的框架转换速度。因此,我们认为规范隐含不同框架转换所用历元是目标历元。
我们用参考文献1数据来测试一下,坐标转换软件使用OpenCoord1.2.5。
1、测试
空间直角坐标:-1573750.375000000 5253478.799000000 3246203.310000000 (南充,106E,31N)
经纬度:30.791364451099163 106.676295671078510 309.668728543445470
观测历元:2023.73922
框架ITRF2014
实测CGCS2000坐标:3408592.897000000 373299.982400000 309.677000000
(1)先历元后框架(2000历元)
利用南充地区的平均速度进行历元转换,得到2010历元的位置。
经纬度位置(ITRF2014,2010历元):30.791366038448 106.676290829782 309.673813467845
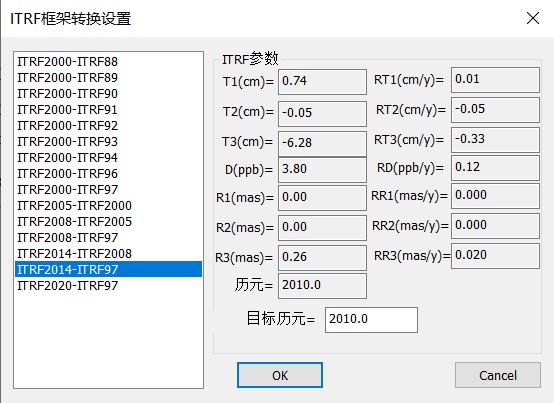
然后,我们做一下ITRF2014-ITRF97(2010历元)的框架转换。
平面位置(ITRF97,2010历元):30.791365563242 106.676290829443 309.663646487519
最后再转成2000历元
经纬度位置(2000历元):30.791366719187 106.676287305737 309.667367476038
平面位置(2000历元):3408592.948843330000 373299.993370219000 309.667367476038
坐标差值:0.051843330264 0.010970219038 -0.009632523962
相差约5cm。
我们一般只做历元转换,忽略框架转换,结果如下。
平面位置:3408593.001533770000 373299.994026001000 309.677534468472
坐标差值:0.104533770122 0.011626001040 0.000534468472
相差约10cm。
(2)先框架(2023.7)后历元
如果先框架(2023历元)转换再历元转换,结果如下:
平面位置(2000历元):3408592.913429690000 373300.000914182000 309.648700235411
坐标差值:0.016429690178 0.018514182011 -0.028299764589
相差约2cm。
确实,先框架(2023.7)后历元得到的结果更贴合实际。
2、分析
但是,先框架(2023.7)后历元得到的结果更贴合实际可能只是巧合。因为在逻辑上,它不如先历元后框架。
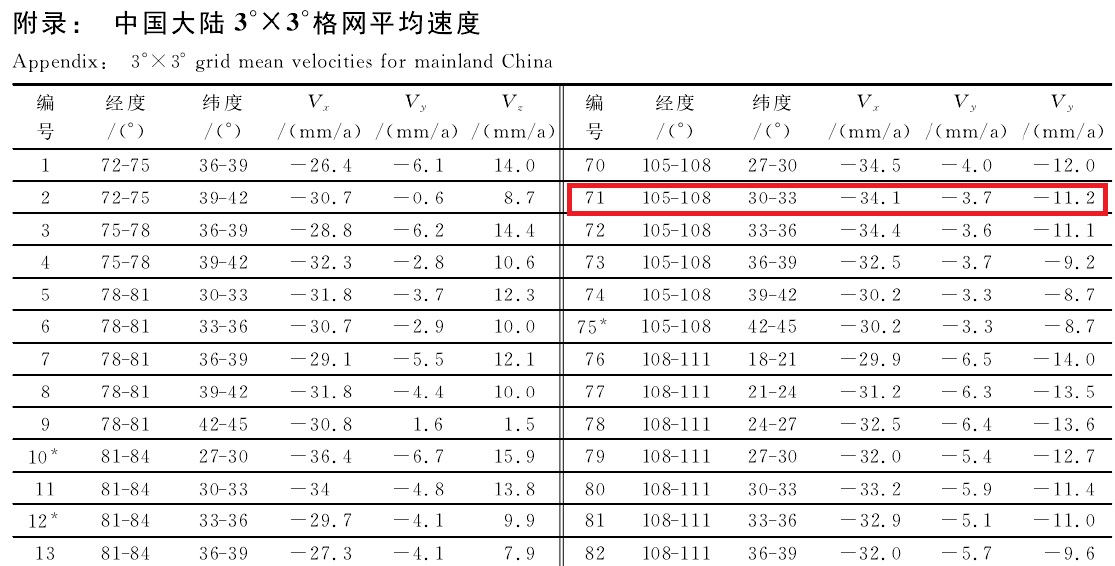
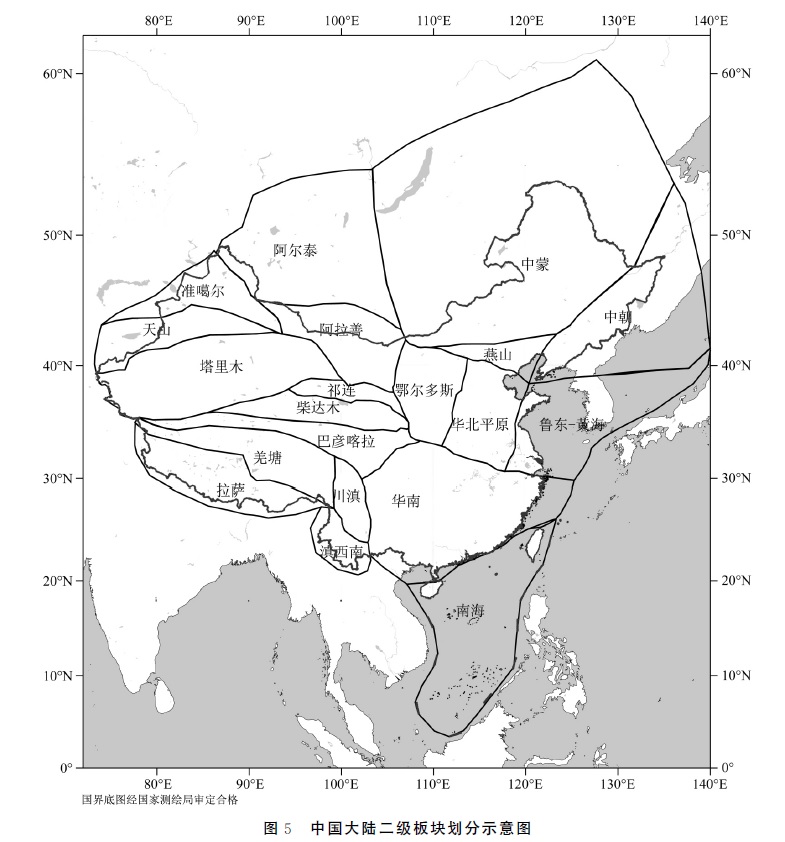
我们利用参考文献3的板块速度场来验证一下,南充位于华南板块,使用高总的程序进行历元转换。
先历元后框架的得到平面位置为:
平面位置:3408592.918746540000 373300.010529705000 309.662669377401
坐标差值:0.021746539976 0.028129704995 -0.014330622599
相差约3cm。
所以,先历元后框架也能得到与先框架后历元相当的结果,且更合符逻辑。
3、小结
1)先历元后框架比先框架后历元在逻辑上更为自洽。
2)框架和历元转换的关键在于速度场,速度场贴合实际,目标坐标就贴合实际;
3)参考文献3给出二级板块的速度比《2000中国大地坐标系_中国大陆速度场_魏子卿》更贴合实际。
4)根据参考文献7,纯框架引起的差别较小,比如ITRF97-ITRF00的xyz分量差别为1~2cm,ITRF00 - ITRF05,xyz坐标分量相差毫米级,因此,我们更应关注历元转换。
参考文献
1、https://blog.csdn.net/yisdong/article/details/135668976?spm=1001.2014.3001.5502
2、http://www.xiaokcehui.com/?post=331
3、http://www.xiaokcehui.com/?post=446
4、https://itrf.ign.fr/ftp/pub/itrf/itrf2008/ITRF2008_GNSS.SSC.txt
5、https://max.book118.com/html/2020/0601/5110020144002301.shtm
6、https://xiaokcehui.blog.csdn.net/article/details/129776062?spm=1001.2014.3001.5502
7、刘立等《坐标框架转换若干问题的研究》
8、《GNSS高精度数据处理-GAMIT/GLOBK入门》