海洋大地测量基准与水下导航系列之二国外海底大地测量基准和海底观测网络发展现状(上)
海底大地控制网建设构想最先由美国斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)提出,目前仅有少数发达国家具备相应技术条件。美国、日本、俄罗斯和欧盟等发达国家通过布测先进的海底大地控制网,不断完善海洋大地测量基准基础设施,加快海洋导航定位技术革新,力求在海洋资源开发和海洋空间利用中占据有利地位,并已在海洋地质、海洋灾害监测等方面取得重要研究成果。
通过在海底板块及板块交界处布设海底大地控制点,并采用GNSS-声呐(GNSS-Acoustic,GNSS-A)观测技术进行定期观测,可获取板块的运动速率和板块扩展观测数据。
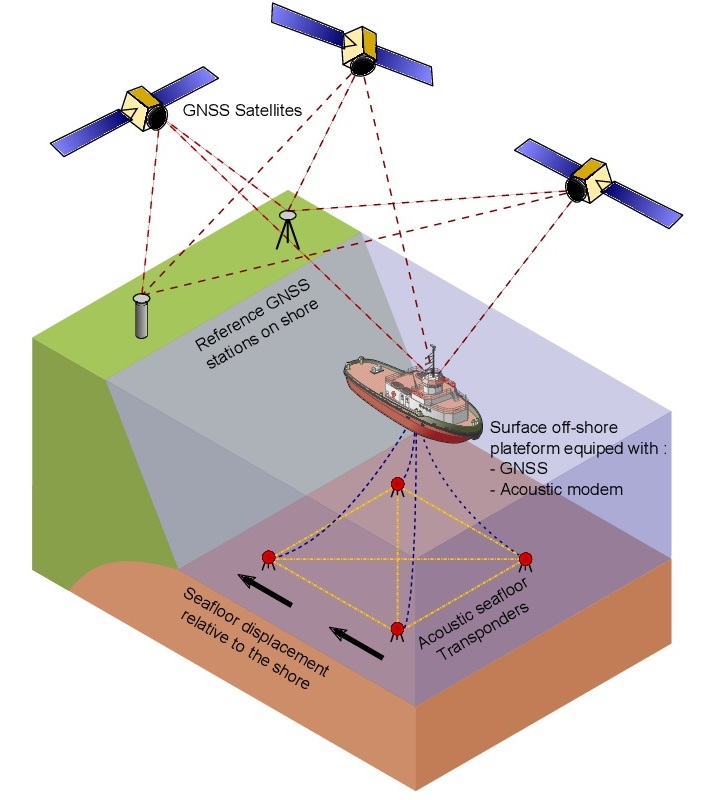
水下潜器通过与海底大地控制点进行通信和距离测量,可实现高精度导航。
海底压力计观测是海洋潮汐观测和海底地壳垂直运动监测的重要技术手段,可测得毫米级精度的高程形变信息,可用于在海底建立固定的垂直基准。
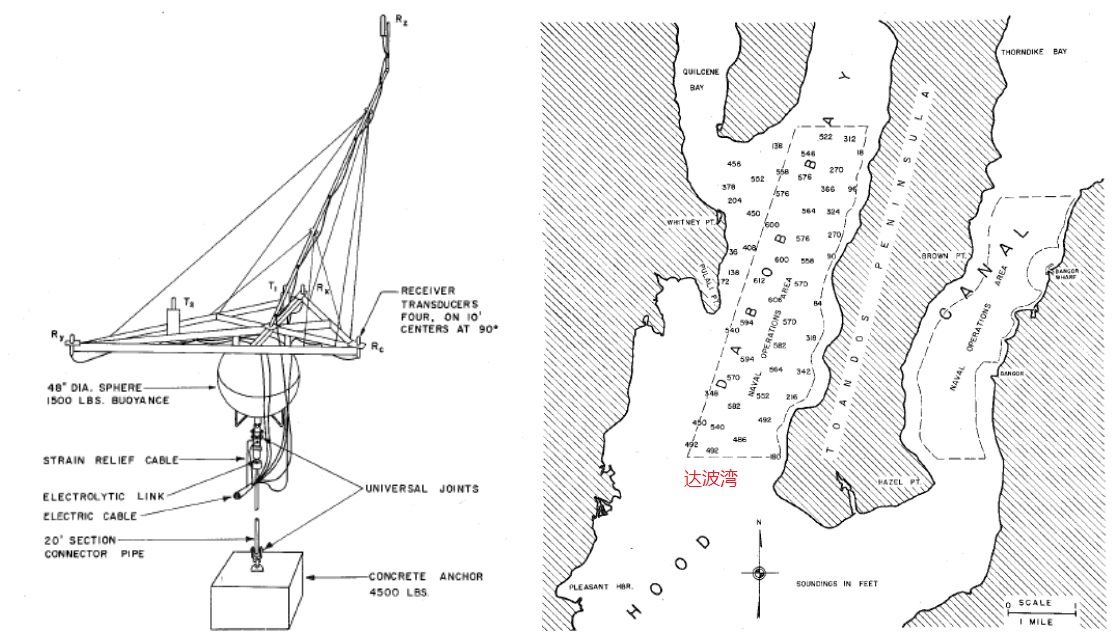
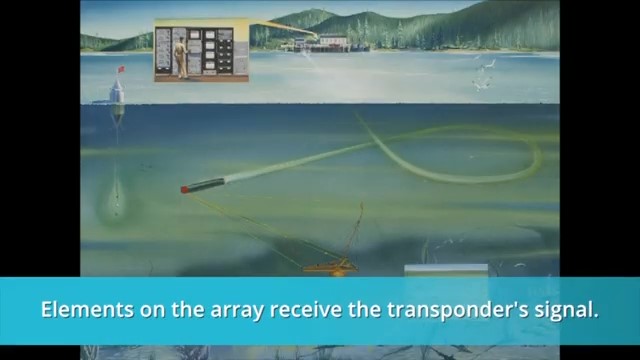
20世纪六七十年代,美国华盛顿大学应用物理实验室(Applied Physics Laboratory,APL)在美国西海岸达波湾(Dabob Bay)试验靶场建成了由四个水听器组成的三维坐标跟踪系统。每个水听器有4个接收器,2个发射器,当鱼雷收到水听器阵的信号后,其发射器被激活,发射声波信号给水听器阵,然后岸基计算鱼雷的位置。
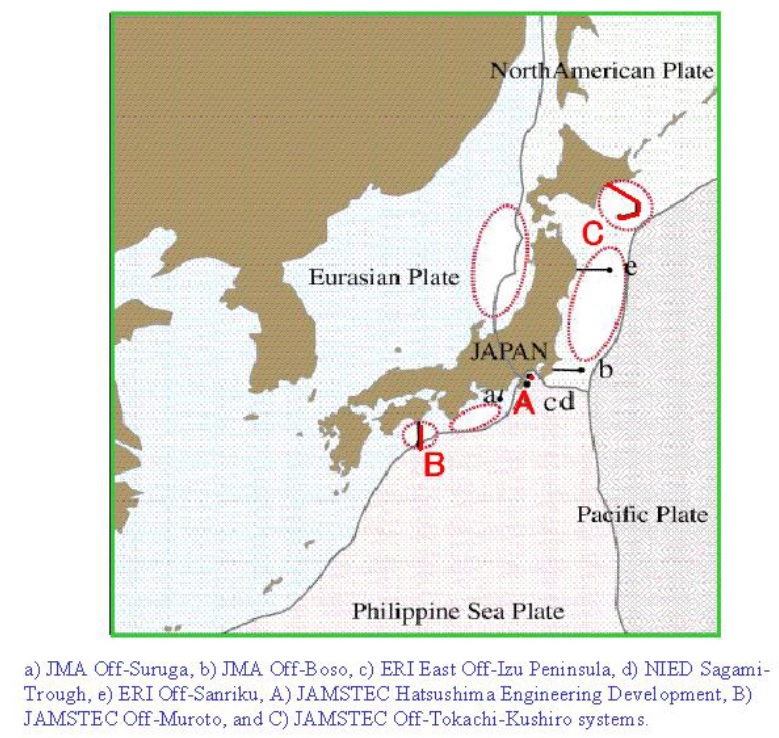
1970 年代后期,日本开始研究海底有缆地震监测。1996 年,地震研究促进委员会(the Headquarters for Earthquake Research Promotion)建议在五个海域安装海底电缆地震观测系统,以加强地震监测,见下图,并建设了8台海底有缆科学观测站,其中日本气象厅(JMA)2个,东京大学地震研究所(ERI)2个、国家地球科学与防灾研究所 (NIED)1个, 日本海洋科学技术中心 (JAMSTEC) 3个。每个观测站都安装了海底地震仪、海啸测量仪、力仪、倾斜仪、流向流速仪、温度仪等观测仪器。
2011年JAMSTEC在日本南海海槽建设了地震-海啸实时观测网(Dense Oceanfloor Network System for Earthquakes and Tsunamis,DONET),只关注地震、大地测量和海啸观测。DONET是节点型观测网,通过节点的分支装置连接各种传感器,节点通过300km的主缆连接。2015年,日本又在DONET的西南方建设了DONET2,DONET2主缆长度450km,由多个集群组成,每个集群都以节点为中心,布置4个观测站,观测站安装了地震仪和压力传感器。
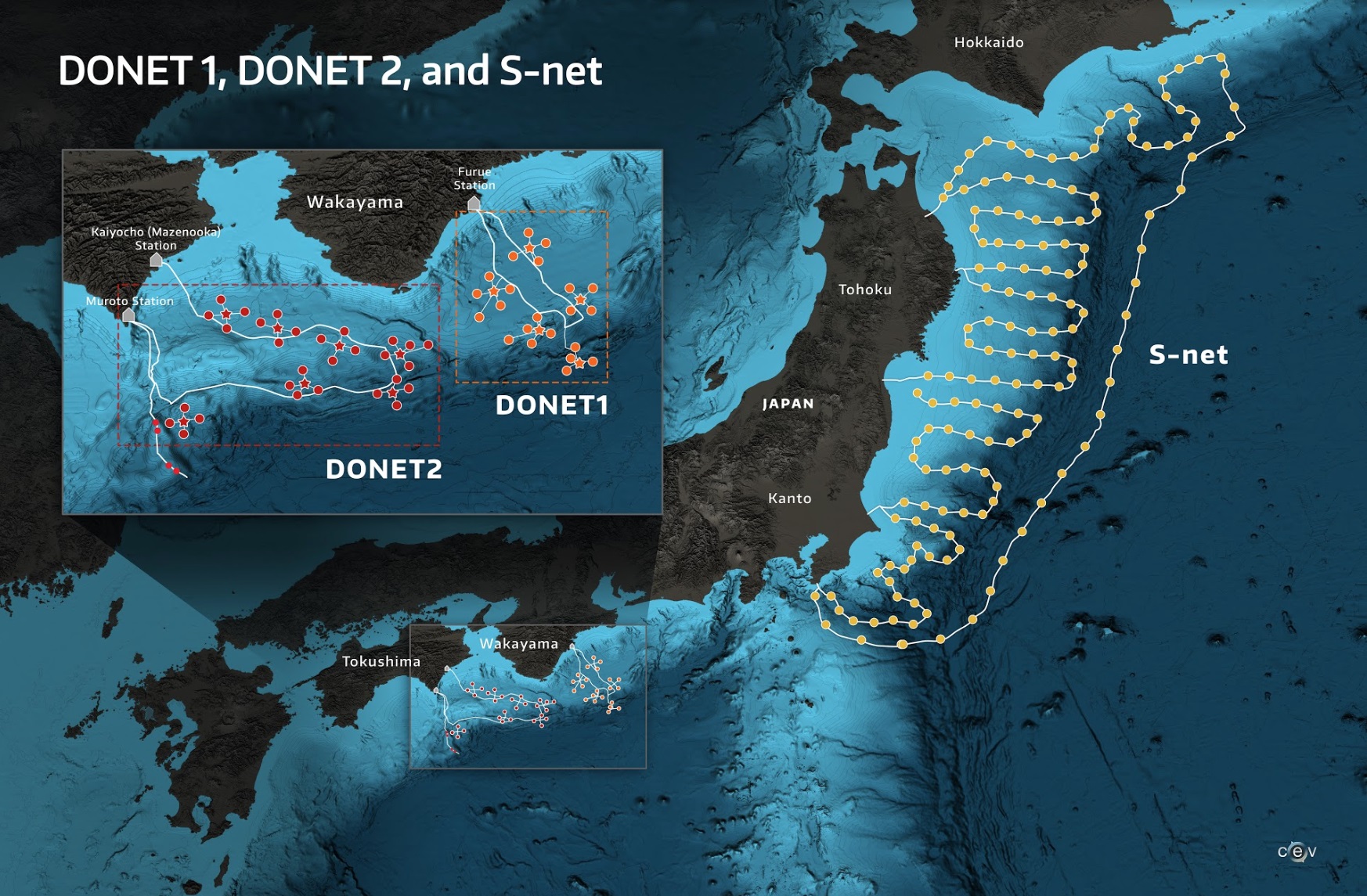
2018年NIED在日本东部建设了覆盖海沟的日本海沟地震海啸观测网(S-Net,Seafloor observation Network for Earthquakes and Tsunamis along the Japan Trench),它的主缆长度5800km,有150多个节点,每个节点都安装了地震仪和压力传感器,节点间距30km。
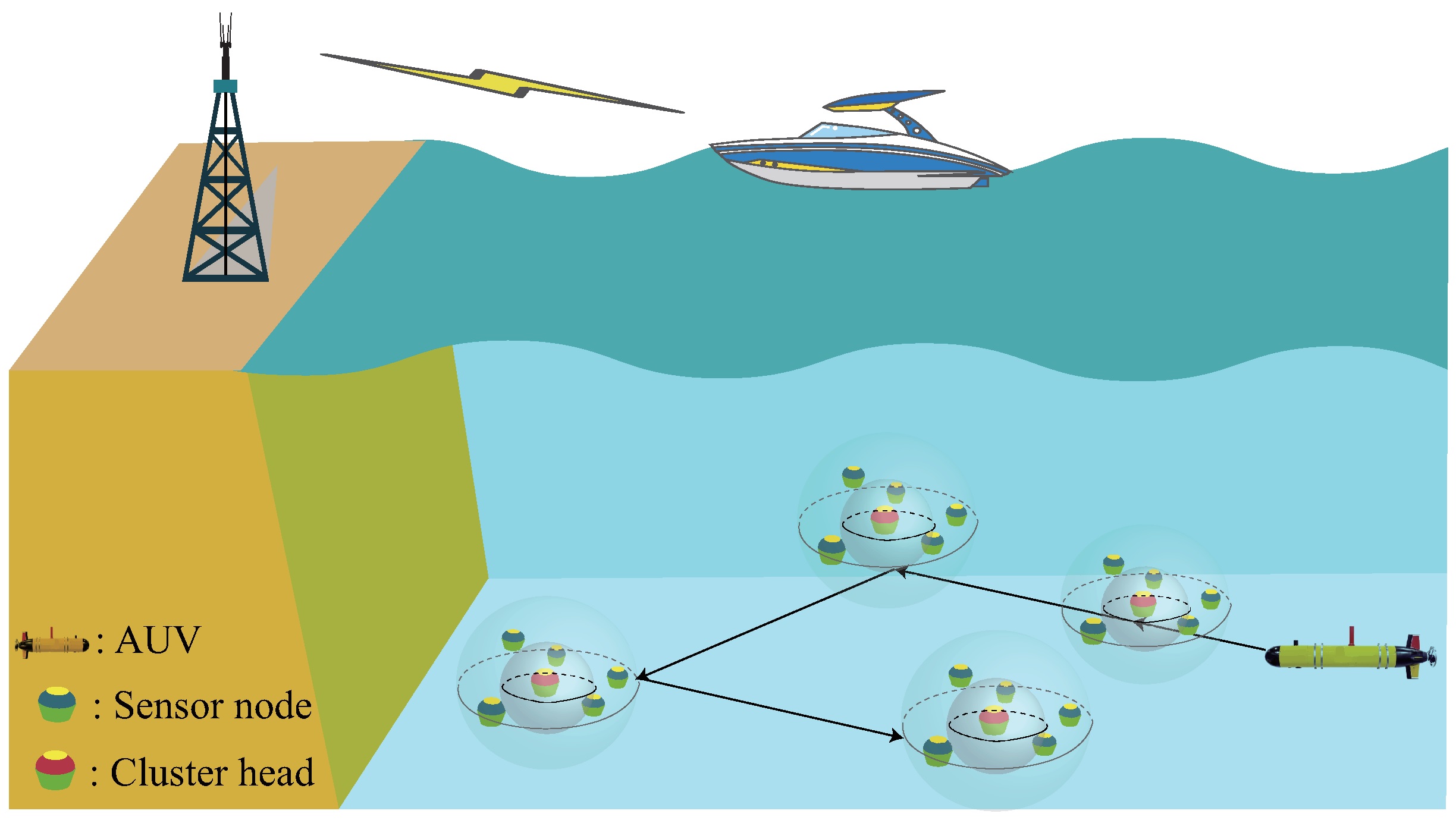
2016年,圣彼得堡Okeanpribor公司制出了新型水下导航定位系统,该系统由自主水下航行器AUV、装备卫星通信设备Messenger-D1M的声纳浮标和GLONASS组成。AUV在厚厚的北极冰层下几公里深度工作,能够确定自己的位置(精度在毫米以内),并与空中、水面和地面控制站实时通信。它首先部署在俄罗斯海上抗冰平台Prirazlomnaya,用来水下监测和支持石油生产。

该定位系统将使用几种类型的浮标;淹没,漂浮,甚至冻结在冰里。浮标的硬件部分由无线电和声纳单元组成,带有一个公共供电系统,放置在一个塑料外壳内。无线电和声纳设备包括一个甚高频无线电台,GLONASS接收器,称为Messenger-D1M的卫星通信系统,以及与AUV进行水下通信的设备。
浮标有三种操作模式:(1)浮标通过卫星频道接收信息,存储信息,然后根据请求传输给AUV;(2)浮标通过甚高频无线电与AUV实时连接海岸、空中和海上控制中心,这种数据交换使控制中心不仅知道AUV在哪里,正在解决什么问题,而且还能持续管理它;(3)机器人完全独立操作,只需用浮标确认自己的位置,调整自己的航向。在紧急情况下,AUV可以提交SOS,通知其深水任务结束。
Okeanpribor公司的Volgograd Shtil Research Institute还为俄罗斯海军设计一种Dialog系列的多波段声纳数据传输通道设备(SDTC,multi-band sonar data transmission channels ),能传输声音和数字信息,实现其潜艇、AUV和潜水员在水下高速互联。这些设备被称为水下调制解调器(underwater modems)。

二进制数字信息被转换成一种特殊的声纳信号,通过水下调制解调器中的特殊数学算法发送给用户,然后用户使用相同的算法解码接收的信号,这样就实现双向通信,也可用于多个对象之间的电话会议。这些设备发出的声纳信号可将声音或数字信息传送到35公里以外、6公里深的地方。确切的传送距离取决于水文条件,比如天时,季节,和海洋环境等。
SDTC将信号分成几个数据包,在10个频带上同时传输,确保即使在最恶劣的天气和水文条件下,传输速率也不会低于68 kb/s。使用了独特的数学信号处理技术,克服声波在水下传播的多普勒和多路径效应,避免原始信息的扭曲。
参考文献:
海洋大地测量基准与水下导航_中国科学院_2022.06
走向深海,发展自立自强的海底大地测量基准_鲍李峰_2023.09
海底大地基准网建设及其关键技术_杨元喜_2020
构建海底信息网技术分析_宋德枢_2024.01
应用于海洋物联网的水声通信技术发展综述_瞿逢重_2023.11
海底大地基准建设技术及其研究进展_刘焱雄_2022.10
基于GNSS_声学定位的海洋大地基准网构建及应用_许扬胤_2024
国际海底观测网络的发展及现状_李德威
海底观测网发展现状及趋势研究_陈建冬
https://earth-planets-space.springeropen.com/articles/10.1186/s40623-019-1082-y#citeas
https://link.springer.com/article/10.1007/s00190-020-01389-1
https://www.sohu.com/a/139454215_600501
Assessing Seaglider Model-Based Position Accuracy on an Acoustic Tracking Range
Performance of a MEMS IMU for Localizing a Seaglider AUV on an Acoustic Tracking Range
Spatial and Temporal Variations in Acoustic propagationduring the PLUSNet’07 Exercise in Dabob Bay
Six_decades_of_evolution_in_underwater_acoustics_dabob acoustic array
https://www.sohu.com/a/162362564_465915
https://www.ieee-jp.org/section/tokyo/chapter/OE-22/ARENA/ARENA-E.html
A Technical Report on the Advanced Real-time Earth Monitoring Network in the Area
https://www.rbth.com/economics/defence/2016/12/13/underwater-glonass-system-developed-by-russia_656013
http://www.cev.washington.edu/file/DONET_DONET_II_and_S_Net_Cable_Configurations.html
https://www.rbth.com/economics/defence/2016/12/26/internet-used-by-sailors-underwater_668488