无人机集群路径规划:雾凇优化算法( rime optimization algorithm,RIME)求解无人机集群路径规划,提供MATLAB代码
一、单个无人机路径规划模型介绍
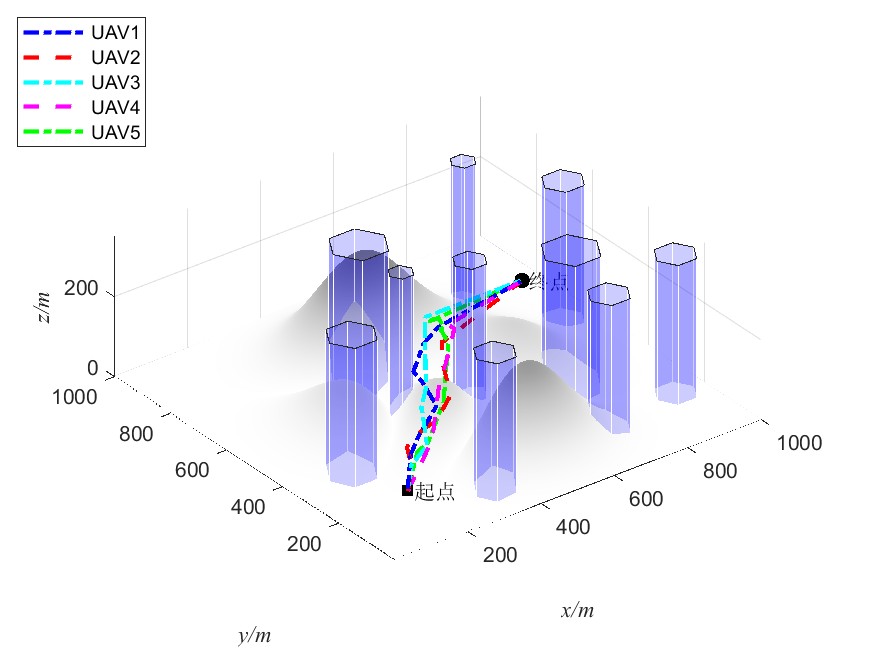
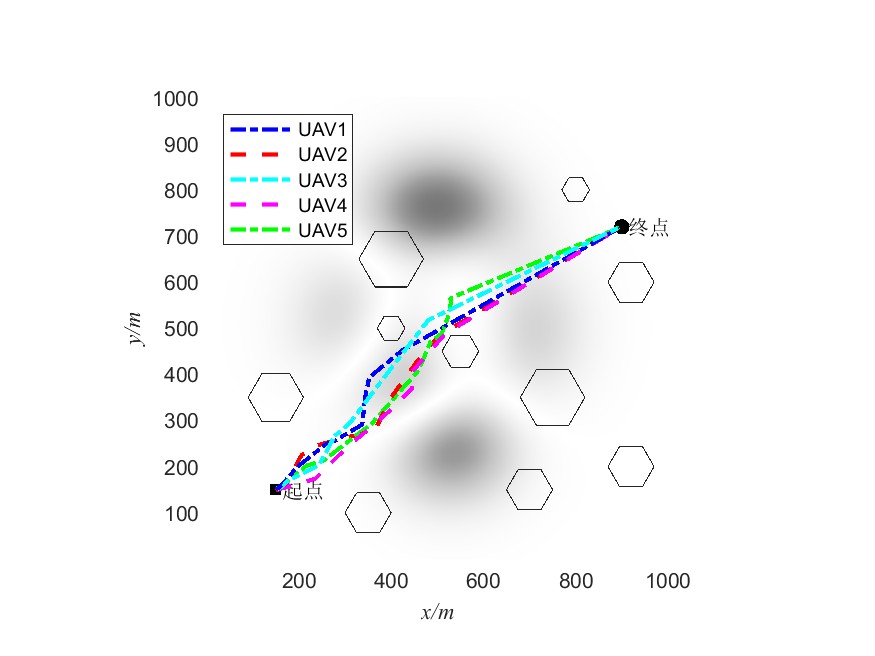
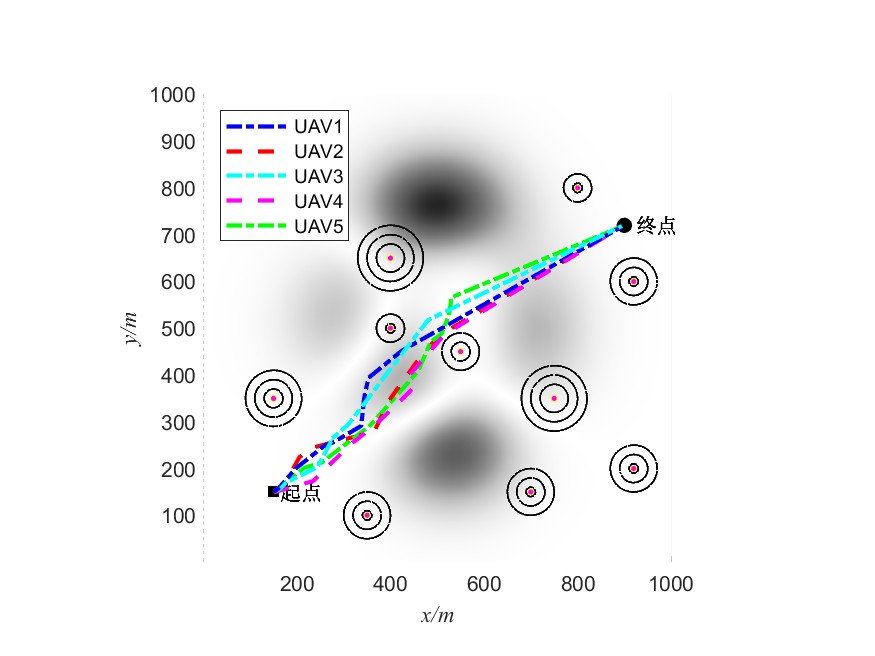
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、无人机集群模型介绍
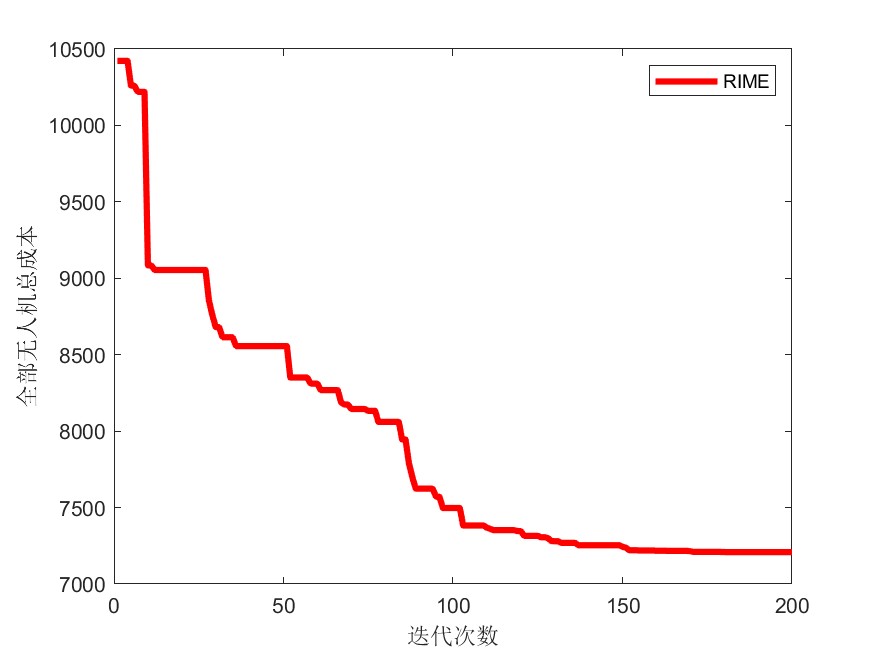
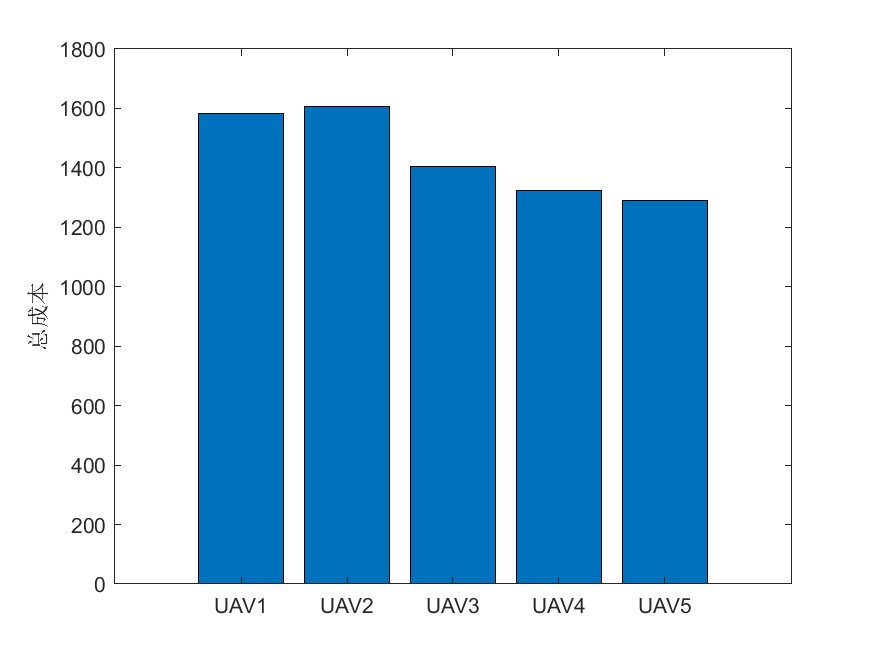
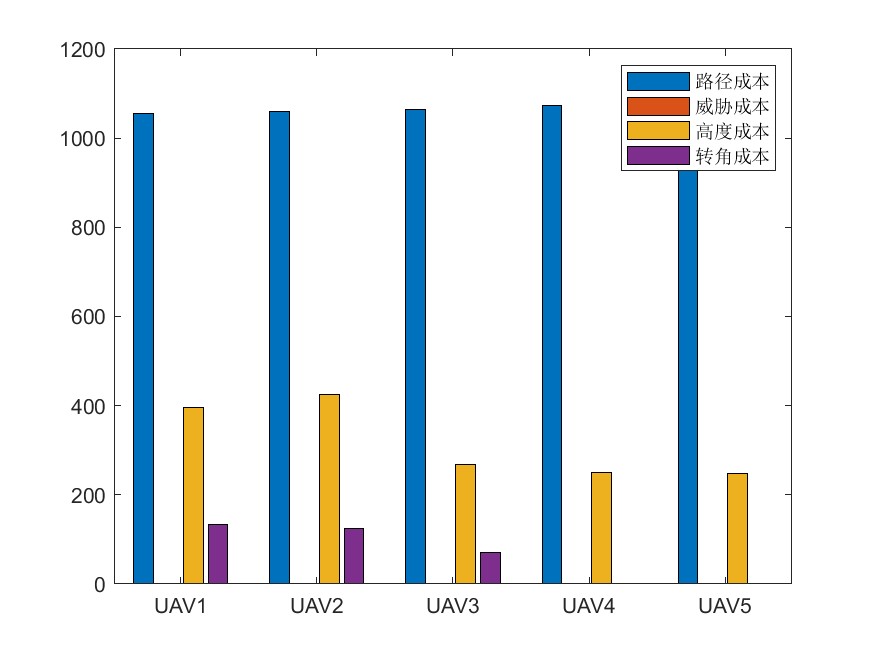
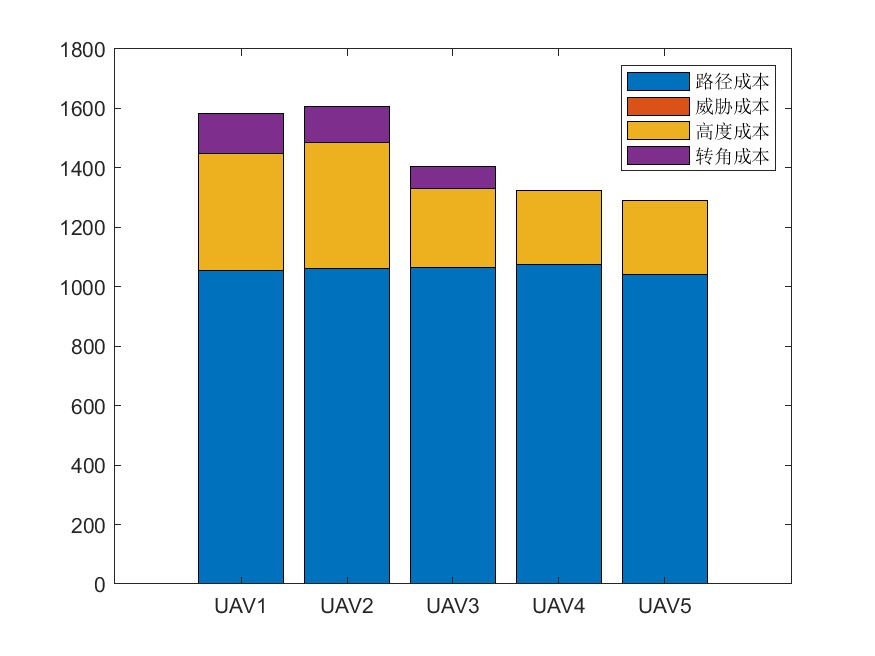
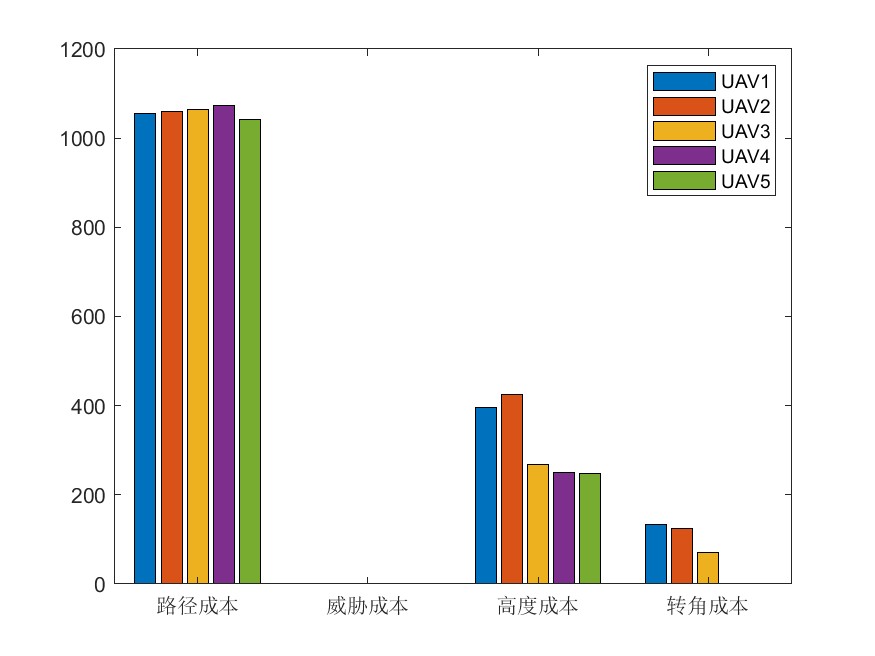
本文中以5个无人机构成无人机集群,采用优化算法同时规划五个无人机的路径,每个无人机的成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
三、 雾凇优化算法求解无人机集群路径规划
雾凇优化算法( rime optimization algorithm,RIME)于2023年提出,该算法是一种启发式算法,被广泛应用于多个领域,如机器学习、优化问题和网络调度。它是基于自然界中的雾凇现象而命名的。雾凇是一种形成在天然物体表面的冰晶,像是一层白雾将物体包裹着,这种现象在自然界中非常普遍。雾凇优化算法的设计灵感来自于这种现象,通过寻找最优解的过程中,算法会像雾凇一样逐渐覆盖整个搜索空间,并且保留最优的决策。
参考文献:
[1]Pradeep Jangir, Sundaram B. Pandya, Kanak Kalita, Jasgurpreet Singh Chohan, Laith Abualigah, Saurav Mallik11, Hong Qin. Multi-Objective RIME algorithm-based Techno-Economic analysis for security constraints load dispatch and power flow including uncertainties model of Hybrid Power Systems. Energy Reports.
[2]Su, Hang, et al. “RIME: A Physics-Based Optimization.” Neurocomputing, vol. 532, Elsevier BV, May 2023, pp. 183–214, doi:10.1016/j.neucom.2023.02.010.
原文链接:https://blog.csdn.net/weixin_46204734/article/details/140362748
3.1部分代码
close all
clear
clc
dbstop if all error
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=50;%种群大小(可以自己修改)
maxgen=200;%最大迭代次数(可以自己修改)
[fMin,bestX,ConvergenceCurve] = (pop, maxgen,Xmin,Xmax,dim,fobj);
%% 计算无人机的相关信息
N=length(bestX)/(3*model.n);%无人机的数量
St=1;
for i=1:N %计算每个无人机的适应度值
Et=St+3*model.n-1;
Xbest=bestX(St:Et);
BestPosition(i,:) = SphericalToCart(Xbest);%% 计算航迹坐标
BestFit(i)=MyCost(Xbest,1);%% 计算每个无人机的适应度值
UAVfit(i,:)=MyCost(Xbest,2);
St=Et+1;
end
%% 保存结果
save BestPosition BestPosition %每个无人机的航迹坐标
save BestFit BestFit %每个无人机的总成本
save UAVfit UAVfit % 每个无人机的四个成本
save ConvergenceCurve ConvergenceCurve % 无人机集群的成本随迭代次数的变化3.2部分结果