【路径规划】基于球向量的粒子群优化(SPSO)算法在无人机路径规划中的实现
摘要
本文介绍了基于球形矢量的粒子群优化(Spherical Particle Swarm Optimization, SPSO)算法,用于无人机(UAV)路径规划。SPSO算法通过引入球形矢量的概念,增强了粒子群在多维空间中的探索和利用能力,能够有效地规划无人机在复杂地形和障碍环境中的安全路径。该算法还可以被修改应用于其他优化问题,如机器人导航、无线传感器网络等。
理论
SPSO是一种改进的粒子群优化算法,通过将粒子的位置更新与球形矢量结合,以增强算法在多维空间中的收敛性和搜索能力。该算法的关键特点包括:
-
球形矢量:每个粒子的速度和位置更新均采用球形矢量形式,从而提升在高维空间中避开局部最优解的能力。
-
动态避障:SPSO不仅优化路径长度,还能动态调整路径以避开环境中的障碍物,确保无人机的飞行安全。
-
适应性:算法适用于静态和动态障碍环境,通过调整控制参数,可以有效地应对不同的复杂场景。
实验结果
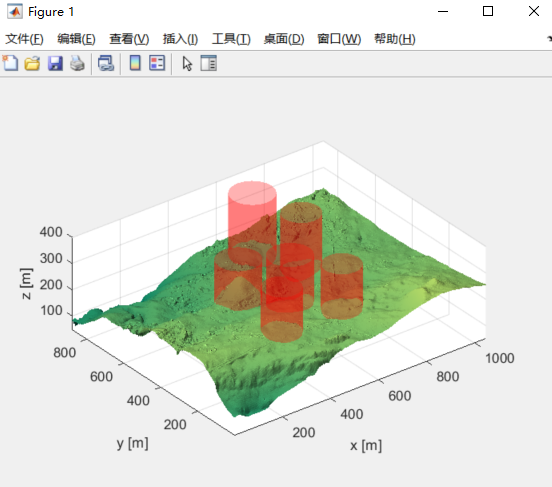
实验使用SPSO算法对无人机在复杂地形上的路径规划进行了测试,结果如下:
-
路径优化:SPSO算法成功为无人机规划了从起点到目标的最短安全路径,避开了所有障碍物。
-
安全性增强:通过球形矢量的动态调整,无人机能够在不同障碍密集度的场景中安全飞行。
-
计算效率:相比传统PSO算法,SPSO在路径优化和避障能力上表现出更快的收敛速度和更好的路径质量。
部分代码
% Define environment with terrain and obstacles
terrain = generateTerrain(1000, 1000); % Terrain data
obstacles = [300, 400, 50; 600, 500, 100]; % [x, y, radius]
% SPSO parameters
numParticles = 30;
numIterations = 150;
inertia = 0.7;
cognitiveCoeff = 1.4;
socialCoeff = 1.4;
% Initialize particles
particles = initializeSPSOParticles(numParticles, terrain);
% Main SPSO loop
for iter = 1:numIterations
for i = 1:numParticles
% Evaluate fitness of each particle based on terrain and obstacles
particles(i).fitness = evaluateFitness(particles(i).position, terrain, obstacles);
% Update personal and global best positions
if particles(i).fitness < particles(i).bestFitness
particles(i).bestPosition = particles(i).position;
particles(i).bestFitness = particles(i).fitness;
end
end
% Update particles' velocities and positions using spherical vectors
updateSPSO(particles, inertia, cognitiveCoeff, socialCoeff);
% Plot current path of the best particle
plotUAVPath(particles, terrain, obstacles);
pause(0.1);
end
% Display final optimized path
title('SPSO-Based UAV Path Planning');
xlabel('x [m]');
ylabel('y [m]');
zlabel('z [m]');
grid on;
参考文献
❝
Phung, M. D., & Ha, Q. P. (2024). Safety-Enhanced UAV Path Planning Using Spherical Particle Swarm Optimization. Journal of Robotics and Autonomous Systems.
Tran, H. (2024). Advanced Optimization Techniques in UAV Navigation. Springer.