【无人机设计与控制】Multi-UAV|多无人机多场景路径规划算法MATLAB
摘要
本研究探讨了多无人机路径规划问题,提出了三种不同算法的对比分析,包括粒子群优化(PSO)、灰狼优化(GWO)和鲸鱼优化算法(WOA)。利用MATLAB实现了多场景仿真实验,验证了各算法在多无人机协同路径规划中的性能。实验结果表明,GWO和WOA算法在路径优化的收敛速度和路径长度上表现优于PSO算法,且WOA算法在规避障碍物和路径平滑性上具有显著优势。
理论
多无人机路径规划问题的目标是在满足特定约束的情况下,找到多无人机的最优飞行路径。路径规划的优化目标通常包括最短路径、最低能耗、避开障碍物等。在本研究中,我们选择了三种不同的智能优化算法来解决多无人机路径规划问题:
-
粒子群优化(PSO):PSO通过模拟群体中个体(粒子)之间的信息共享来寻找最优解,每个粒子根据自身的历史最佳位置和群体的最佳位置进行更新。
-
灰狼优化(GWO):GWO模拟了灰狼的社会结构和捕猎行为,分别通过领导者(α狼)、追随者(β狼、δ狼)和探路者(ω狼)进行搜索,逐步逼近最优解。
-
鲸鱼优化算法(WOA):WOA通过模拟鲸鱼的捕食行为,通过收缩包围机制和螺旋更新位置等策略来找到最优解,具有良好的全局搜索能力。
实验结果
在实验中,我们针对多种地形场景进行了多无人机路径规划仿真,具体包括:
-
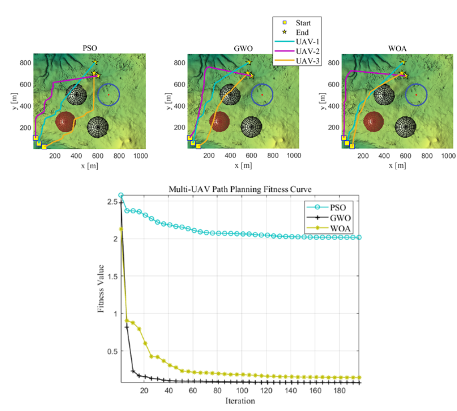
二维平面场景:各算法均能成功找到无人机的最优路径,但GWO和WOA在路径收敛速度上表现更优,WOA尤其在障碍物密集区域表现出更高效的路径规划能力。
-
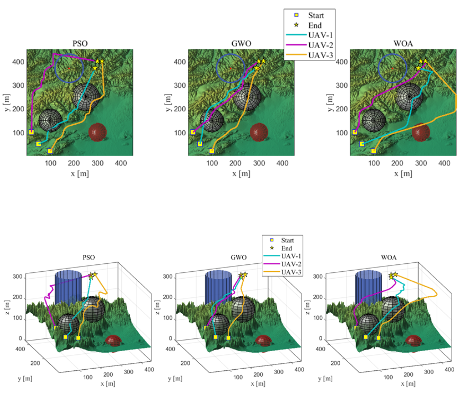
三维复杂地形场景:PSO在三维环境下的表现稍显逊色,路径较长且不够平滑。GWO和WOA则能更好地适应复杂地形,WOA在路径平滑度和障碍规避上表现尤为突出。
如下是各算法的路径规划结果及其在不同迭代次数下的适应度值收敛曲线:
-
PSO:收敛较慢,且路径存在多余的弯曲。
-
GWO:较快收敛,路径优化较好,但在复杂环境中仍存在局部收敛问题。
-
WOA:收敛速度最快,路径平滑且避障效果最佳。
部分代码
% 主程序:MainMultiUAVMultiAlgo.m
% 初始化无人机位置、目标位置及障碍物
UAV_num = 3;
start_positions = [50, 50; 150, 150; 250, 250];
target_positions = [900, 900; 850, 850; 800, 800];
obstacles = [300, 300, 50; 600, 600, 80; 700, 400, 60];
% 选择算法(PSO, GWO, WOA)
algorithm = 'WOA'; % 可选择 'PSO', 'GWO', 'WOA'
% 运行优化算法
switch algorithm
case 'PSO'
result = PSO_path_planning(UAV_num, start_positions, target_positions, obstacles);
case 'GWO'
result = GWO_path_planning(UAV_num, start_positions, target_positions, obstacles);
case 'WOA'
result = WOA_path_planning(UAV_num, start_positions, target_positions, obstacles);
end
% 绘制路径
plot_path(result);
% PSO算法路径规划
function result = PSO_path_planning(UAV_num, start_positions, target_positions, obstacles)
% 初始化粒子
% PSO优化路径
% 具体算法逻辑略
end
% GWO算法路径规划
function result = GWO_path_planning(UAV_num, start_positions, target_positions, obstacles)
% GWO优化路径
% 具体算法逻辑略
end
% WOA算法路径规划
function result = WOA_path_planning(UAV_num, start_positions, target_positions, obstacles)
% WOA优化路径
% 具体算法逻辑略
end
% 路径绘制函数
function plot_path(result)
% 根据规划结果绘制路径
figure;
plot(result.x, result.y, 'LineWidth', 2);
xlabel('x [m]');
ylabel('y [m]');
title('UAV Path Planning');
legend('UAV-1', 'UAV-2', 'UAV-3');
end
参考文献
❝
Kennedy, J., & Eberhart, R. (1995). Particle swarm optimization. Proceedings of ICNN'95 - International Conference on Neural Networks, 1942-1948.
Mirjalili, S., Mirjalili, S. M., & Lewis, A. (2014). Grey Wolf Optimizer. Advances in Engineering Software, 69, 46-61.
Mirjalili, S., & Lewis, A. (2016). The Whale Optimization Algorithm. Advances in Engineering Software, 95, 51-67.