OpenHarmony(鸿蒙南向开发)——小型系统芯片移植指南(一)
往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- 持续更新中……
移植须知
本文详细介绍如何将OpenHarmony小型系统的linux和LiteOS-A内核移植到新的开发板上,要求读者具有一定的嵌入式系统开发经验。建议先查看 入门指导 ,以了解OpenHarmony软件架构、目录结构、内核子系统和驱动子系统相关知识。当前小型系统已适配的开发板如下表所示:
表1 OpenHarmony小型系统已适配的开发板
| 开发板 | 内核 | arch | ROM | RAM | 文件系统 | Flash 类型 |
|---|---|---|---|---|---|---|
| hispark_taurus | LiteOS-A和linux-4.19 | ARM cortex-a7 | 8G | 1GB | VFAT、EXT4 | eMMC4.5 |
| hispark_aries | LiteOS-A | ARM cortex-a7 | 16M | 512M | JFFS2 | SPI NOR |
表1中的开发板可作为待移植开发板的参考,当前LiteOS-A和linux-4.19支持的arch、ROM占用、支持的文件系统和支持的Flash类型如下表所示:
表2 OpenHarmony小型系统内核移植信息表
| 内核 | 支持的arch | ROM | 文件系统 | Flash类型 |
|---|---|---|---|---|
| LiteOS-A | ARMv7 | > 2M | VFAT、JFFS2、YAFFS2 | SPI NOR、NAND、EMMC |
| linux-4.19 | ARM, ARM64、 MIPS、 X86等 | > 5M | VFAT、JFFS2、YAFFS、EXT/2/3/4、NFS等等 | NOR、NAND、EMMC等 |
编译构建
编译环境搭建
首先请搭建OpenHarmony基础环境,相关操作请参考 快速入门环境搭建章节 。用户态和LiteOS-A的内核态编译均使用llvm编译器编译,安装方法在搭建基础环境中已提供。若选择移植linux内核,请执行如下命令安装gcc-arm-linux-gnueabi交叉编译工具链,用于编译linux内核态镜像:
sudo apt-get install gcc-arm-linux-gnueabi
编译构建系统介绍
编译构建流程、编译脚本编写、目录规则、独立编译单个组件、独立编译芯片解决方案等介绍请见 编译构建子系统介绍。
新建芯片解决方案
了解编译框架和搭建完编译环境后,请参考如下步骤新建芯片解决方案:
- 新建目录
芯片解决方案的目录规则为:device/{芯片解决方案厂商}/{开发板}。以海思的hispark_taurus开发板为例,在代码根目录执行如下命令建立目录:
mkdir -p device/hisilicon/hispark_taurus
<textarea id="copy1722420153718" style="color: inherit; font: inherit; position: absolute; top: -9999px; left: -9999px; z-index: -9999;"></textarea>
device
└── company # 芯片解决方案厂商
└── board # 开发板名称
├── BUILD.gn # 编译脚本
├── hals # OS南向接口适配
├── linux # 可选,linux内核版本
│ └── config.gni # linux版本编译配置
└── liteos_a # 可选,liteos内核版本
└── config.gni # liteos_a版本编译配置
以hispark_taurus移植linux内核为例,目录树应该如下:
device
└── hisilicon
└── hispark_taurus
├── BUILD.gn
├── hals
├── ......
└── linux
└── config.gni
目录树建立后开发板相关的源码放到hispark_taurus目录下。
- 配置开发板编译选项
步骤1中的config.gni可配置开发板相关的编译选项,编译构建框架将会遵照该配置文件中的参数编译所有用户态OS组件。其中关键的字段说明如下:
kernel_type: 开发板使用的内核类型,例如:“liteos_a”, “liteos_m”, “linux”。
kernel_version: 开发板使用的内核版本,例如:“4.19”。
board_cpu: 开发板CPU类型,例如:“cortex-a7”, “riscv32”。
board_arch: 开发板芯片arch, 例如: “armv7-a”, “rv32imac”。
board_toolchain: 开发板自定义的编译工具链名称,例如:“gcc-arm-none-eabi”。若为空,则使用默认为ohos-clang。
board_toolchain_prefix:编译工具链前缀,例如:“gcc-arm-none-eabi”。
board_toolchain_type: 编译工具链类型,目前支持gcc和clang。例如:“gcc” ,“clang”。
board_cflags: 开发板配置的c文件编译选项。
board_cxx_flags: 开发板配置的cpp文件编译选项。
board_ld_flags: 开发板配置的链接选项。
还以海思的hispark_taurus开发板为例,对应的device/hisilicon/hispark_taurus/config.gni内容如下:
# Board CPU type, e.g. "cortex-a7", "riscv32".
board_cpu = "cortex-a7"
# Toolchain name used for system compiling.
# E.g. gcc-arm-none-eabi, arm-linux-harmonyeabi-gcc, ohos-clang, riscv32-unknown-elf.
# Note: The default toolchain is "ohos-clang". It's not mandatory if you use the default toochain.
board_toolchain = "mips-linux-gnu-gcc"
# The toolchain path installed, it's not mandatory if you have added toolchain path to your ~/.bashrc.
board_toolchain_path =
rebase_path("//prebuilts/gcc/linux-x86/arm/arm-linux-ohoseabi-gcc/bin",
root_build_dir)
# Compiler prefix.
board_toolchain_prefix = "arm-linux-ohoseabi-"
# Compiler type, "gcc" or "clang".
board_toolchain_type = "gcc"
# Board related common compile flags.
board_cflags = [
]
board_cxx_flags = [
]
board_ld_flags = []
# Board related headfiles search path.
board_include_dirs = []
board_include_dirs += [ rebase_path(
"//prebuilts/gcc/linux-x86/arm/arm-linux-ohoseabi-gcc/target/usr/include",
root_build_dir) ]
# Board adapter dir for OHOS components.
board_adapter_dir = ""
# Sysroot path.
board_configed_sysroot = ""
# Board storage type, it used for file system generation.
storage_type = "emmc"
- 编写开发板编译脚本
步骤1中的BUILD.gn为新增的开发板的编译入口,主要用于编译开发板相关的代码,主要为设备侧驱动、设备侧接口适配(媒体,图形等)和开发板的SDK等等。
海思的hispark_taurus开发板的device/hisilicon/hispark_taurus/BUILD.gn可写成:
# group名称建议与开发板名称一致
group("hispark_taurus") {
deps = [ "//kernel/linux/patches:linux_kernel" ] # 拉起内核编译
deps += [
...... # 开发板其他编译单元
]
}
- 编译调试
在开发板目录下执行hb set和hb build即可启动芯片解决方案的编译,编译框架会以开发板下的BUILD.gn为入口启动编译。
最后
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

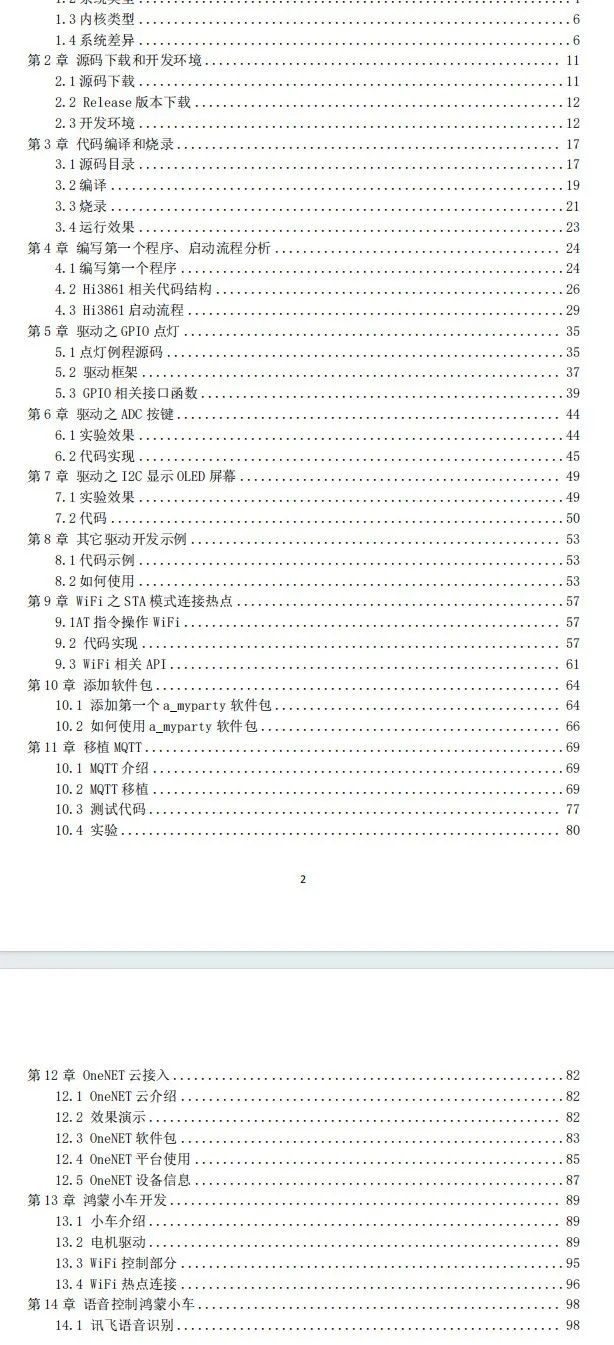
《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
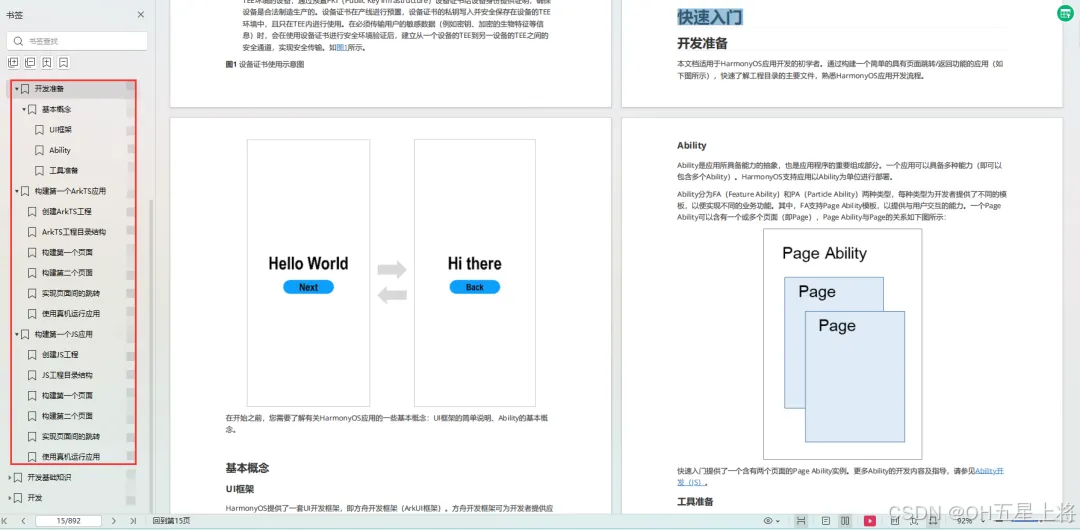
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
鸿蒙开发面试真题(含参考答案):
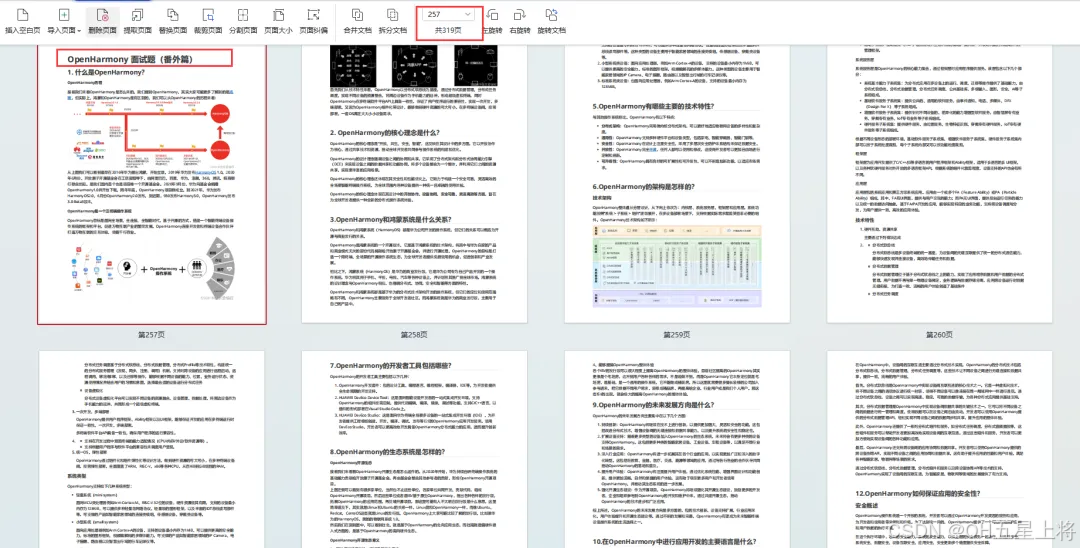
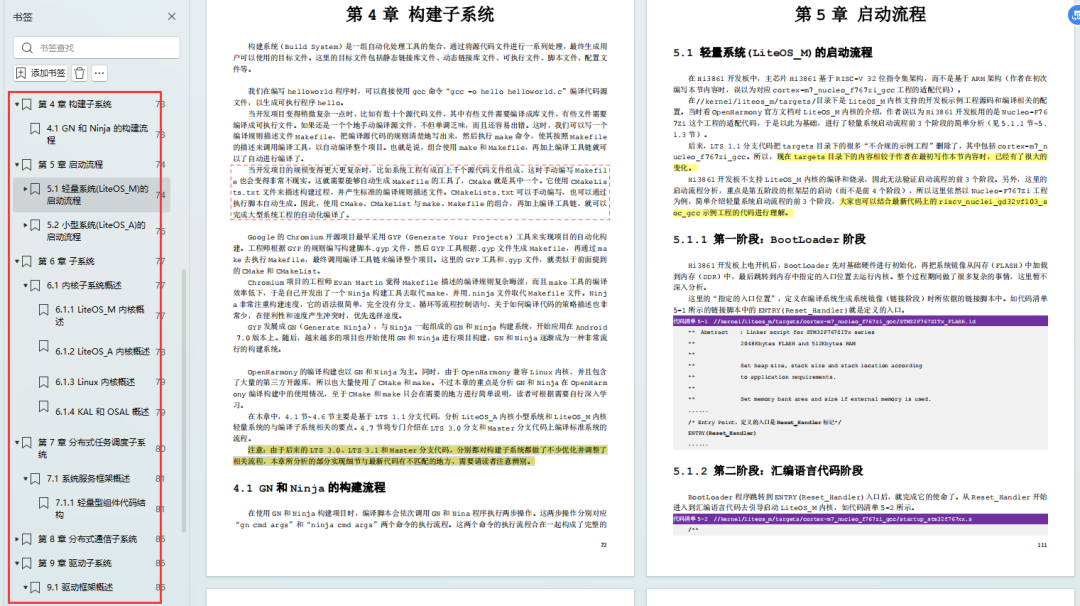
《OpenHarmony源码解析》:
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN/733GH/overview