FreeRTOS | STM32F407 FreeRTOS移植(第十四天)
点击上方"蓝字"关注我们
01、获取FreeRTOS源码
>>>打开FreeRTOS官网:www.freertos.org,在官网下载即可,这里不做步骤说明,或者通过百度下载即可,下载网址:
【超级会员V1】通过百度网盘分享的文件:FreeRTOS
链接:https://pan.baidu.com/s/1MaoISeHM4M68gN3LQUOHaA?pwd=68Hh
提取码:68Hh
复制这段内容打开「百度网盘APP 即可获取」
02、FreeRTOS移植
>>>2.1准备工程
使用一个配置好时钟的工程,如LED库函数开发工程。将工程改名为FreeRTOS移植
2.2向工程中添加相应文件
(1)在工程中创建一个FreeRTOS文件夹,如下图
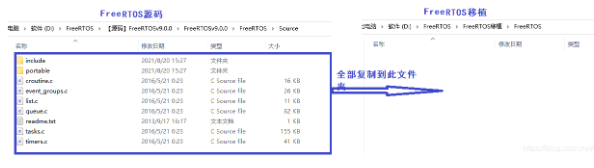
(2)复制FreeRTOS文件到工程文件夹FreeRTOS中
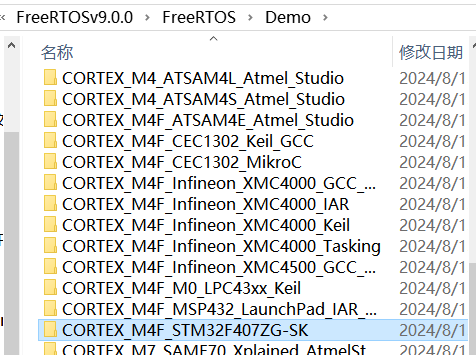
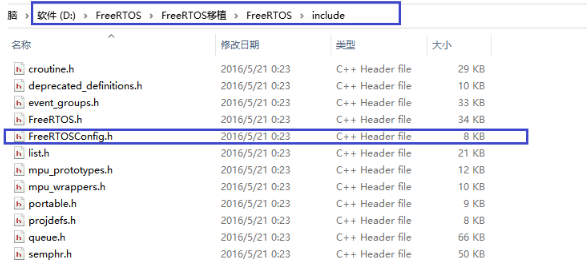
复制源码下源码r的FreeRTOSv9.0.0\FreeRTOSv9.0.0\FreeRTOS\Demo\CORTEX_M4F_STM32F407ZG-SK\FreeRTOSConfig.h配置文件到工程:FreeRTOS移植\FreeRTOS\include\文件夹下
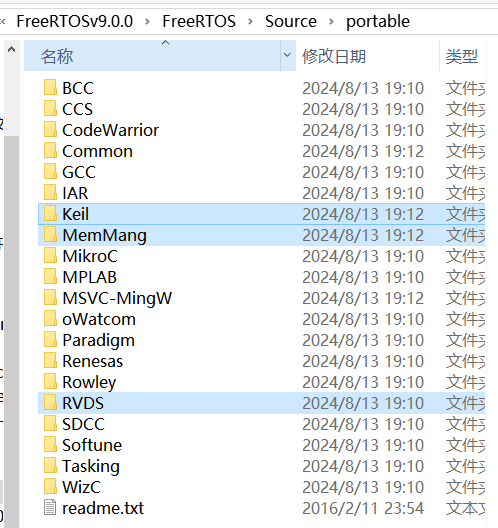
(3)删除工程中FreeRTOS/protable的其它非Keil编译器所需文件,只保留Keil、MemMang和RVDS这三个文件夹即可。
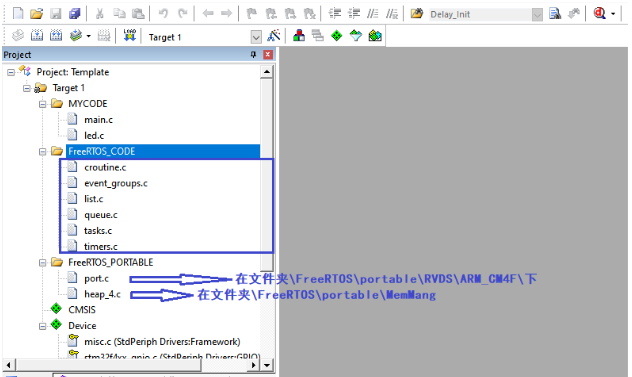
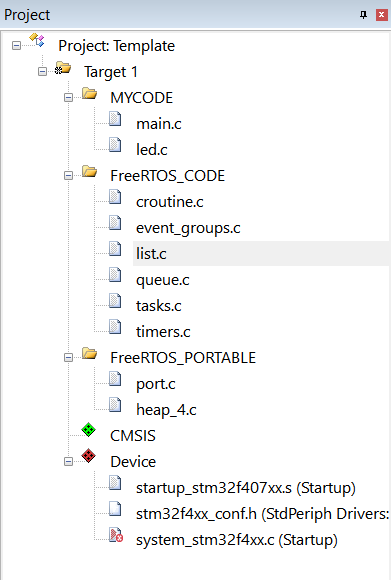
(4)打开工程,新建两个分组:FreeRTOS_CODE和FreeRTOS_PORTABLE,并往分组添加下面的文件

03、这里为什么选择heap_4.c,相关介绍如下:
>>>heap_1.c
适合一些不会删除任务,队列以及信号量的任务,特别是一些比较简单的系统和一些对安全性要求比较高的系统。事实上,很多系统中只要创建了任务之后就会一直执行,不会删除任务。所以这个文件适用环境还是比较多的。
heap_2.c
能分配,能回收,但是回收时不考虑内存碎片的场所。适合一些申请和释放操作不是特别频繁,而且不会申请大数组的场所。(申请和释放会造成内存碎片,过多操作内存中可能没有大的连续区域)
heap_3.c
这种方法实际使用的还是c语言的malloc和free函数。与平台没有太大关系。
heap_4.c
内存分配和释放操作比较频繁的系统。例如要重复创建删除任务,队列,信号量等。
heap_5.c
系统需要管理不连续的内存空间,例如接入外部ram的场合。
>>>(5)添加头文件路径
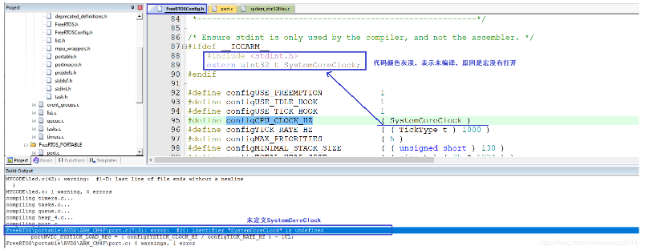
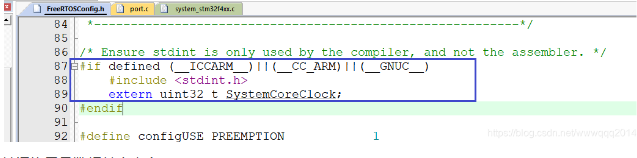
(6)编译工程,修改错误信息
修改如下:
关闭钩子函数相关宏定义
修改后,编译工程,即可看到无误,说明移植工作已经完成一大半。


05、FreeRTOS测试
>>>以STM32F407ZET6开发板每隔1S变更灯状态来测试移植的FreeRTOS是否移植成功。在main.c添加以下代码,编译下面即可。编译下载即可看到开发板每隔1S变更灯状态
#include "stm32f4xx.h"#include "led.h"#include "FreeRTOS.h"#include "task.h"static TaskHandle_t app_task1_handle = NULL;/* 任务1 */static void app_task1(void* pvParameters);int main(void){Led_Init();/* 创建app_task1任务 */xTaskCreate((TaskFunction_t )app_task1, /* 任务入口函数 */(const char* )"app_task1", /* 任务名字 */(uint16_t )512, /* 任务栈大小 */(void* )NULL, /* 任务入口函数参数 */(UBaseType_t )4, /* 任务的优先级 */(TaskHandle_t* )&app_task1_handle); /* 任务控制块指针 *//* 开启任务调度 */vTaskStartScheduler();}static void app_task1(void* pvParameters){for(;;){GPIO_ToggleBits(GPIOF, GPIO_Pin_9);vTaskDelay(1000);}}
06、led.c
>>>LED灯
#include "led.h"/*********************************引脚说明:LED0 -- PF9**********************************/void Led_Init(void){GPIO_InitTypeDef GPIO_InitStruct;//使能GPIOF组时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; //引脚9GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //推挽输出GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度GPIO_Init(GPIOF, &GPIO_InitStruct);}
>>>
总结
>>>上节回顾
| RTOS | 那么什么是RTOS?三大操作系统?(第十四天) |
| FreeRTOS | 原理介绍和资源get(第十四天) |
故我在
点击下方卡片 关注我
↓↓↓