内核提供的通用I2C设备驱动I2C-dev.c分析:file_ops篇
往期内容
I2C子系统专栏:
- I2C(IIC)协议讲解-CSDN博客
- SMBus 协议详解-CSDN博客
- I2C相关结构体讲解:i2c_adapter、i2c_algorithm、i2c_msg-CSDN博客
- 内核提供的通用I2C设备驱动I2c-dev.c分析:注册篇
总线和设备树专栏:
- 总线和设备树_憧憬一下的博客-CSDN博客
- 设备树与 Linux 内核设备驱动模型的整合-CSDN博客
前言
在上一篇,注册篇中,从讲解普通的字符设备驱动框架后再讲解了关于i2c-dev.c中是如何去注册字符设备驱动的,接下来就讲解关于其file_operations中定义的函数是如何去实现的。
内核中提供的驱动文件: Linux-4.9.88/drivers/i2c/i2c-dev.c📎i2c-dev.c
先来file_operation看看定义了哪些函数:
static const struct file_operations i2cdev_fops = {
.owner = THIS_MODULE,
.llseek = no_llseek,
.read = i2cdev_read,
.write = i2cdev_write,
.unlocked_ioctl = i2cdev_ioctl,
.open = i2cdev_open,
.release = i2cdev_release,
};
1. i2cdev_open
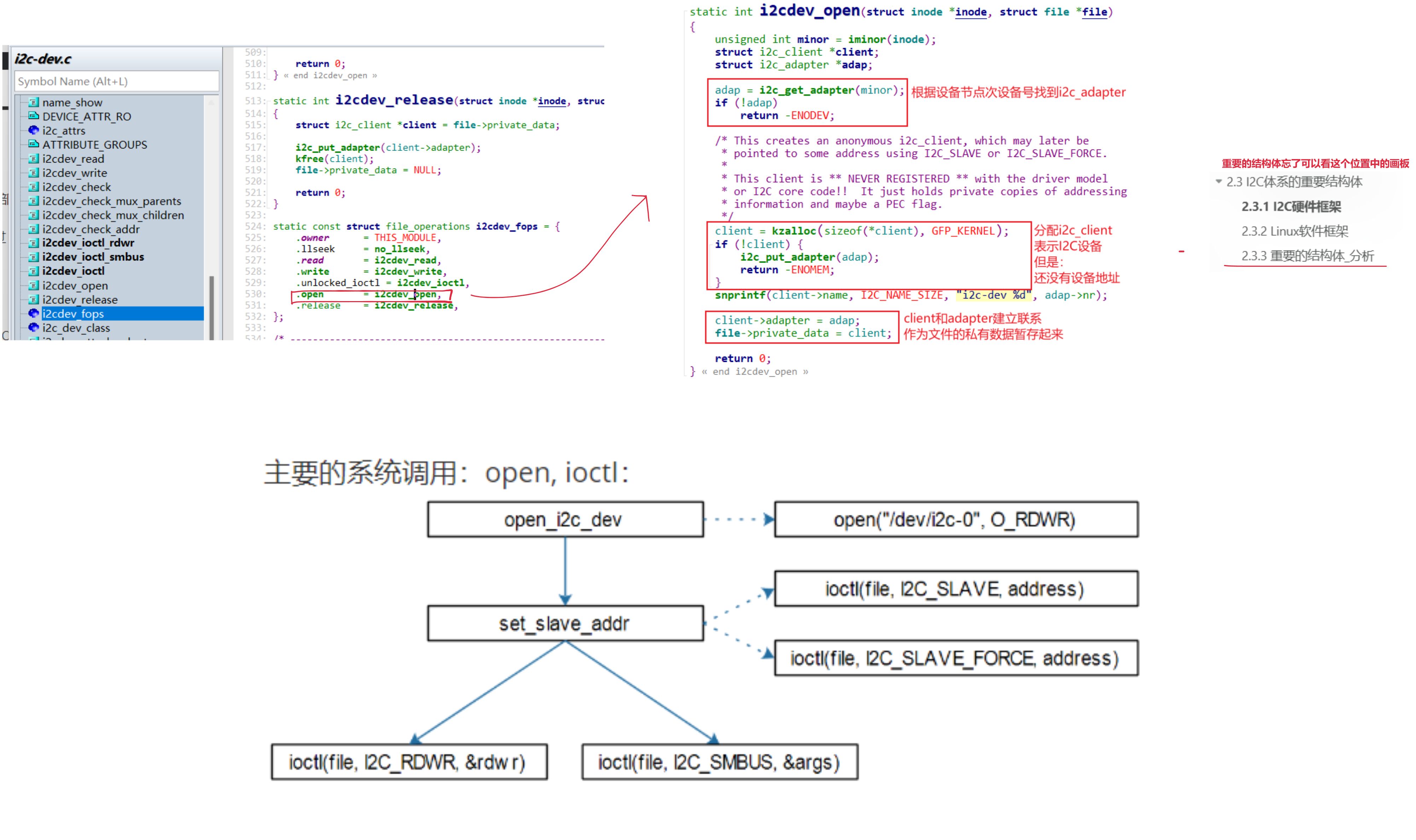
static int i2cdev_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode); // 获取次设备号
struct i2c_client *client;
struct i2c_adapter *adap;
// 根据次设备号获取对应的 I²C 适配器
adap = i2c_get_adapter(minor);
if (!adap)
return -ENODEV; // 如果适配器不存在,返回 -ENODEV 表示没有设备
/* 创建一个匿名的 i2c_client 结构体,该结构体仅在用户空间与 I2C
* 设备通信时使用,并不会注册到内核的 I²C 驱动模型中。
*/
client = kzalloc(sizeof(*client), GFP_KERNEL);
if (!client) {
i2c_put_adapter(adap); // 如果内存分配失败,释放适配器并返回 -ENOMEM
return -ENOMEM;
}
// 将适配器编号和 "i2c-dev" 作为客户端的名字
snprintf(client->name, I2C_NAME_SIZE, "i2c-dev %d", adap->nr);
// 将 I²C 适配器指针存储到客户端结构体中
client->adapter = adap;
// 将创建的匿名客户端结构体存储在 file->private_data 中,供后续操作使用
file->private_data = client;
return 0; // 成功返回 0
}
- 匿名客户端:此处创建的
i2c_client结构体是匿名的,它不会注册到 I²C 驱动模型或内核的 I²C 核心代码中。这意味着该客户端仅用于用户空间与 I²C 适配器的通信,不会影响系统中的其他 I²C 驱动和设备。 - 用例:创建匿名客户端允许用户通过字符设备接口(如
/dev/i2c-X)对 I²C 总线进行操作,用户可以通过 ioctl 等系统调用向特定的从设备发送命令。
i2cdev_open 的核心功能是为打开的 I²C 设备文件创建一个匿名的 I²C 客户端(i2c_client),该客户端只用于当前文件操作的上下文中,允许用户通过字符设备与 I²C 适配器通信。
2. i2cdev_ioctl
i2cdev_ioctl 函数负责处理来自用户空间的 ioctl 系统调用,允许用户通过 I²C 设备文件对 I²C 设备进行各种控制操作。它主要基于用户传入的命令 (cmd) 来执行不同的功能。 先看下代码,这里添加了一些自己理解的注释,具体的参数在下面小点讲解
static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct i2c_client *client = file->private_data; // 获取当前文件对应的 I²C 客户端
unsigned long funcs;
// 输出调试信息,显示 ioctl 调用的命令和参数
dev_dbg(&client->adapter->dev, "ioctl, cmd=0x%02x, arg=0x%02lx\n", cmd, arg);
switch (cmd) {
case I2C_SLAVE:
case I2C_SLAVE_FORCE:
if ((arg > 0x3ff) || (((client->flags & I2C_M_TEN) == 0) && arg > 0x7f))
return -EINVAL; // 检查设备地址的有效性
if (cmd == I2C_SLAVE && i2cdev_check_addr(client->adapter, arg))
return -EBUSY; // 检查地址是否忙
client->addr = arg; // 设置客户端的 I²C 地址
return 0;
case I2C_TENBIT:
if (arg)
client->flags |= I2C_M_TEN; // 启用 10 位地址模式
else
client->flags &= ~I2C_M_TEN; // 禁用 10 位地址模式
return 0;
case I2C_PEC:
if (arg)
client->flags |= I2C_CLIENT_PEC; // 启用 PEC 校验
else
client->flags &= ~I2C_CLIENT_PEC; // 禁用 PEC 校验
return 0;
case I2C_FUNCS:
funcs = i2c_get_functionality(client->adapter); // 获取适配器的功能集
return put_user(funcs, (unsigned long __user *)arg); // 将功能集返回给用户空间
case I2C_RDWR:
return i2cdev_ioctl_rdwr(client, arg); // 执行多字节读写操作
case I2C_SMBUS:
return i2cdev_ioctl_smbus(client, arg); // 处理 SMBus 操作
case I2C_RETRIES:
client->adapter->retries = arg; // 设置重试次数
break;
case I2C_TIMEOUT:
client->adapter->timeout = msecs_to_jiffies(arg * 10); // 设置超时时间,单位为 10 毫秒
break;
default:
return -ENOTTY; // 对于未识别的命令,返回 `-ENOTTY` 表示不支持此 ioctl
}
return 0;
}
2.1 i2cdev_ioctl: I2C_SLAVE/I2C_SLAVE_FORCE
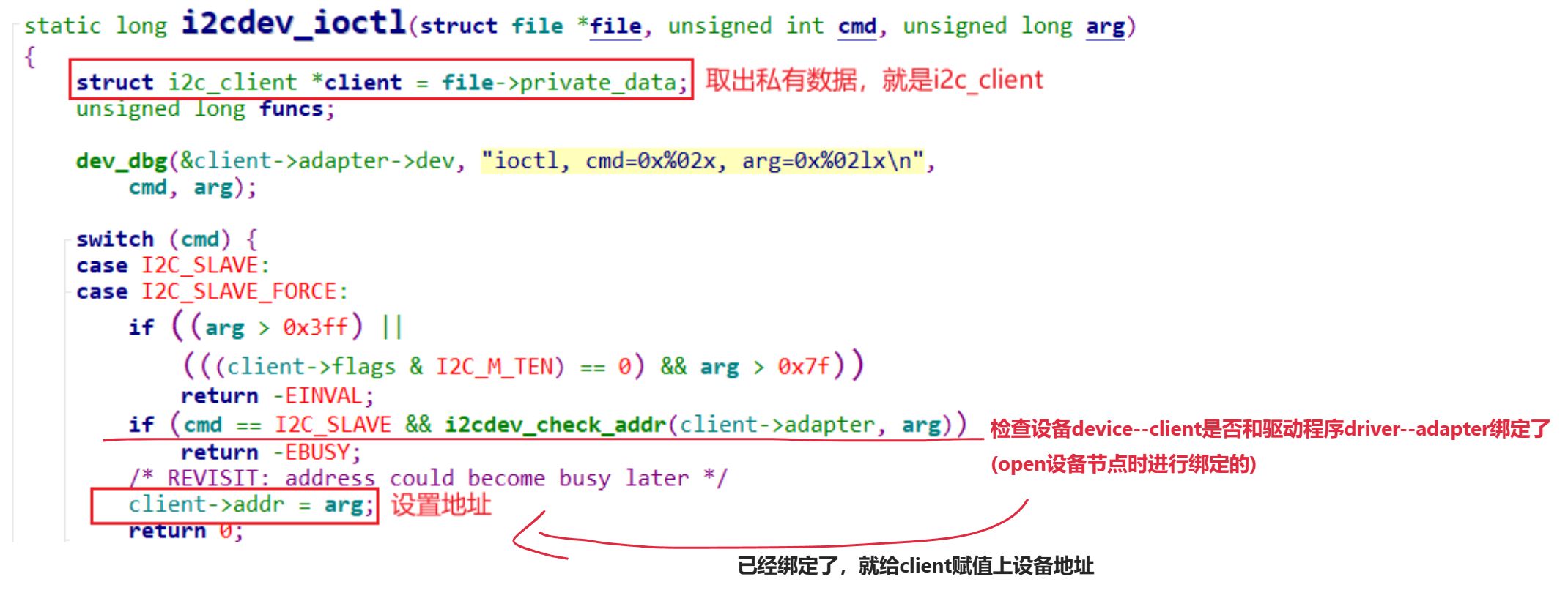
**I2C_SLAVE** 和 **I2C_SLAVE_FORCE** 命令:
- 这两个命令用于设置 I²C 设备的从设备地址(
arg参数)。 I2C_SLAVE:在设置地址之前检查是否有其他设备占用该地址,如果占用则返回-EBUSY。I2C_SLAVE_FORCE:强制设置地址,不做占用检查。- 如果地址超出 7 位(标准地址模式)或者 10 位(十位地址模式),返回
-EINVAL表示参数无效。
2.2 i2cdev_ioctl: I2C_RDWR
发起I2C传输
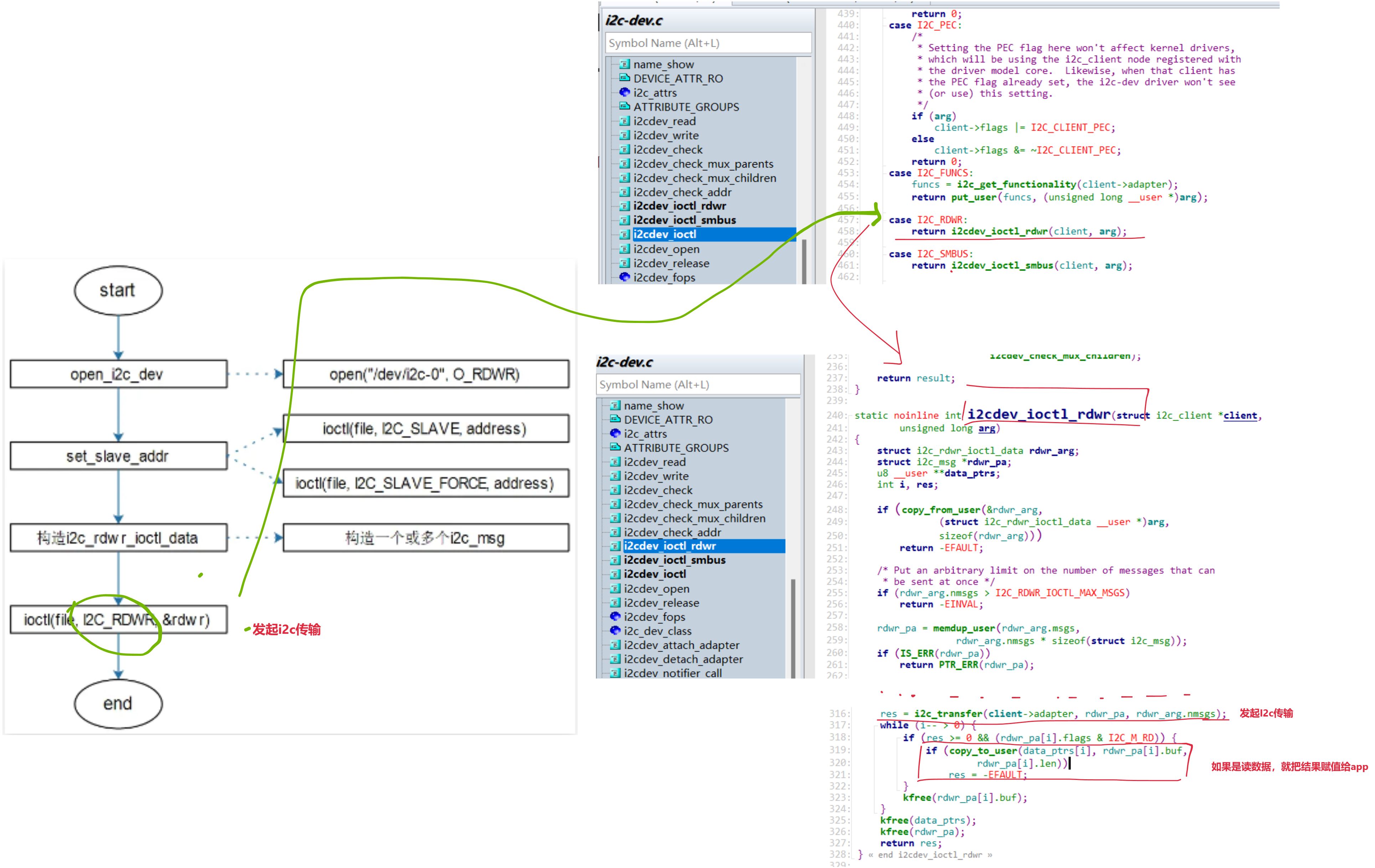
2C_RDWR 命令:
- 这个命令用于执行读写操作,调用
i2cdev_ioctl_rdwr()实现。用户app调用ioctl时使用这个参数,可以触发读写操作。
来看一下i2cdev_ioctl_rdwr函数, 处理用户空间发起的 I2C_RDWR 命令的函数,它执行多条 I²C 消息的读写操作。这是通过 ioctl 调用实现的,用于对 I²C 总线进行低层次的数据操作。函数主要完成从用户空间获取请求,执行 I²C 传输,并将结果返回给用户空间。
static noinline int i2cdev_ioctl_rdwr(struct i2c_client *client,
unsigned long arg)
{
struct i2c_rdwr_ioctl_data rdwr_arg;
struct i2c_msg *rdwr_pa; //传输的基本单位,msg
u8 __user **data_ptrs;
int i, res;
// 从用户空间复制数据到 rdwr_arg
if (copy_from_user(&rdwr_arg,
(struct i2c_rdwr_ioctl_data __user *)arg,
sizeof(rdwr_arg)))
return -EFAULT;
// 检查消息数量是否超过限制
if (rdwr_arg.nmsgs > I2C_RDWR_IOCTL_MAX_MSGS)
return -EINVAL;
// 从用户空间复制消息结构数组到内核空间
rdwr_pa = memdup_user(rdwr_arg.msgs,
rdwr_arg.nmsgs * sizeof(struct i2c_msg));
if (IS_ERR(rdwr_pa))
return PTR_ERR(rdwr_pa);
// 为数据指针数组分配内存
data_ptrs = kmalloc(rdwr_arg.nmsgs * sizeof(u8 __user *), GFP_KERNEL);
if (data_ptrs == NULL) {
kfree(rdwr_pa);
return -ENOMEM;
}
res = 0;
// 遍历每条 I²C 消息
for (i = 0; i < rdwr_arg.nmsgs; i++) {
// 检查消息长度是否合法
if (rdwr_pa[i].len > 8192) {
res = -EINVAL;
break;
}
// 保存用户空间指针,并从用户空间复制消息的缓冲区
data_ptrs[i] = (u8 __user *)rdwr_pa[i].buf;
rdwr_pa[i].buf = memdup_user(data_ptrs[i], rdwr_pa[i].len);
if (IS_ERR(rdwr_pa[i].buf)) {
res = PTR_ERR(rdwr_pa[i].buf);
break;
}
// 如果消息长度是由从设备决定的,需要处理接收缓冲区
if (rdwr_pa[i].flags & I2C_M_RECV_LEN) {
if (!(rdwr_pa[i].flags & I2C_M_RD) ||
rdwr_pa[i].buf[0] < 1 ||
rdwr_pa[i].len < rdwr_pa[i].buf[0] +
I2C_SMBUS_BLOCK_MAX) {
res = -EINVAL;
break;
}
rdwr_pa[i].len = rdwr_pa[i].buf[0]; // 设置接收长度
}
}
// 如果发生错误,释放分配的内存
if (res < 0) {
int j;
for (j = 0; j < i; ++j)
kfree(rdwr_pa[j].buf);
kfree(data_ptrs);
kfree(rdwr_pa);
return res;
}
// 调用内核的 i2c_transfer 函数进行 I²C 传输
res = i2c_transfer(client->adapter, rdwr_pa, rdwr_arg.nmsgs);
// 传输完成后,将数据从内核空间复制回用户空间
while (i-- > 0) {
if (res >= 0 && (rdwr_pa[i].flags & I2C_M_RD)) {
if (copy_to_user(data_ptrs[i], rdwr_pa[i].buf,
rdwr_pa[i].len))
res = -EFAULT;
}
kfree(rdwr_pa[i].buf); // 释放消息缓冲区
}
kfree(data_ptrs); // 释放数据指针数组
kfree(rdwr_pa); // 释放消息结构数组
return res;
}
2.3 i2cdev_ioctl: I2C_SMBUS
发起SMBus传输
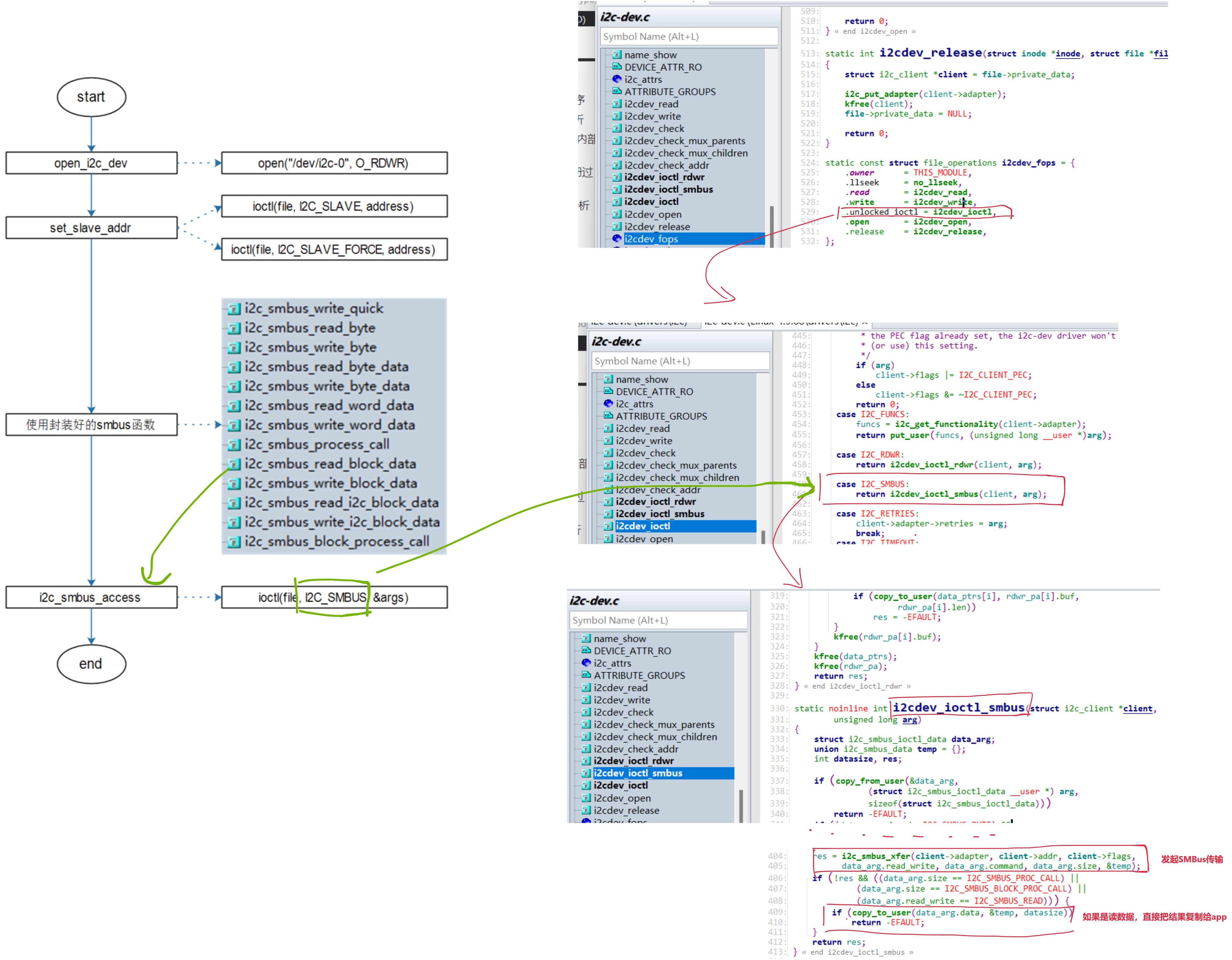
当用户app调用了ioctl时传的参数是I2C_SMBUS,设备驱动程序中就会调用i2cdev_ioctl_smbus来发起smbus传输,i2cdev_ioctl_smbus在i2c-dev.c中定义如下,这里添加了一些自己理解的注释:
static noinline int i2cdev_ioctl_smbus(struct i2c_client *client,
unsigned long arg)
{
struct i2c_smbus_ioctl_data data_arg;
union i2c_smbus_data temp = {};
int datasize, res;
// 从用户空间获取 SMBus 请求数据
if (copy_from_user(&data_arg,
(struct i2c_smbus_ioctl_data __user *) arg,
sizeof(struct i2c_smbus_ioctl_data)))
return -EFAULT;
// 检查数据大小是否在有效范围内
if ((data_arg.size != I2C_SMBUS_BYTE) &&
(data_arg.size != I2C_SMBUS_QUICK) &&
(data_arg.size != I2C_SMBUS_BYTE_DATA) &&
(data_arg.size != I2C_SMBUS_WORD_DATA) &&
(data_arg.size != I2C_SMBUS_PROC_CALL) &&
(data_arg.size != I2C_SMBUS_BLOCK_DATA) &&
(data_arg.size != I2C_SMBUS_I2C_BLOCK_BROKEN) &&
(data_arg.size != I2C_SMBUS_I2C_BLOCK_DATA) &&
(data_arg.size != I2C_SMBUS_BLOCK_PROC_CALL)) {
dev_dbg(&client->adapter->dev,
"size out of range (%x) in ioctl I2C_SMBUS.\n",
data_arg.size);
return -EINVAL;
}
// 检查读/写标志是否合法
if ((data_arg.read_write != I2C_SMBUS_READ) &&
(data_arg.read_write != I2C_SMBUS_WRITE)) {
dev_dbg(&client->adapter->dev,
"read_write out of range (%x) in ioctl I2C_SMBUS.\n",
data_arg.read_write);
return -EINVAL;
}
// 如果是 I2C_SMBUS_QUICK 或 I2C_SMBUS_BYTE 的写操作,不使用数据指针
if ((data_arg.size == I2C_SMBUS_QUICK) ||
((data_arg.size == I2C_SMBUS_BYTE) &&
(data_arg.read_write == I2C_SMBUS_WRITE)))
return i2c_smbus_xfer(client->adapter, client->addr,
client->flags, data_arg.read_write,
data_arg.command, data_arg.size, NULL);
// 检查数据指针是否为空
if (data_arg.data == NULL) {
dev_dbg(&client->adapter->dev,
"data is NULL pointer in ioctl I2C_SMBUS.\n");
return -EINVAL;
}
// 根据 SMBus 命令类型确定数据大小
if ((data_arg.size == I2C_SMBUS_BYTE_DATA) ||
(data_arg.size == I2C_SMBUS_BYTE))
datasize = sizeof(data_arg.data->byte);
else if ((data_arg.size == I2C_SMBUS_WORD_DATA) ||
(data_arg.size == I2C_SMBUS_PROC_CALL))
datasize = sizeof(data_arg.data->word);
else // 块数据或块处理调用
datasize = sizeof(data_arg.data->block);
// 如果是写操作或处理调用,复制用户空间的数据到内核空间
if ((data_arg.size == I2C_SMBUS_PROC_CALL) ||
(data_arg.size == I2C_SMBUS_BLOCK_PROC_CALL) ||
(data_arg.size == I2C_SMBUS_I2C_BLOCK_DATA) ||
(data_arg.read_write == I2C_SMBUS_WRITE)) {
if (copy_from_user(&temp, data_arg.data, datasize))
return -EFAULT;
}
// 处理旧版 I2C 块命令,保持二进制兼容性
if (data_arg.size == I2C_SMBUS_I2C_BLOCK_BROKEN) {
data_arg.size = I2C_SMBUS_I2C_BLOCK_DATA;
if (data_arg.read_write == I2C_SMBUS_READ)
temp.block[0] = I2C_SMBUS_BLOCK_MAX;
}
// 调用内核的 i2c_smbus_xfer 执行 SMBus 传输
res = i2c_smbus_xfer(client->adapter, client->addr, client->flags,
data_arg.read_write, data_arg.command, data_arg.size, &temp);
// 如果是读取操作,传输完成后,将数据复制回用户空间
if (!res && ((data_arg.size == I2C_SMBUS_PROC_CALL) ||
(data_arg.size == I2C_SMBUS_BLOCK_PROC_CALL) ||
(data_arg.read_write == I2C_SMBUS_READ))) {
if (copy_to_user(data_arg.data, &temp, datasize))
return -EFAULT;
}
return res;
}
i2cdev_ioctl_smbus 函数用于处理用户空间发起的 SMBus(系统管理总线)相关的 ioctl 调用。SMBus 是基于 I²C 总线协议的一种更高层的通信协议,常用于传感器和设备管理器之间的通信。这个函数的主要作用是根据传入的 SMBus 命令,对设备执行相应的读写操作。
2.3 read和write
static ssize_t i2cdev_read(struct file *file, char __user *buf, size_t count,
loff_t *offset)
{
char *tmp;
int ret;
struct i2c_client *client = file->private_data;
// 限制读取数据的大小,防止超过8192字节
if (count > 8192)
count = 8192;
// 分配内核缓冲区用于存储从设备读取的数据
tmp = kmalloc(count, GFP_KERNEL);
if (tmp == NULL)
return -ENOMEM; // 内存分配失败,返回错误码
pr_debug("i2c-dev: i2c-%d reading %zu bytes.\n",
iminor(file_inode(file)), count);
// 从I2C设备读取数据
ret = i2c_master_recv(client, tmp, count); ------(1)
if (ret >= 0)
// 将读取的数据复制到用户空间,若失败则返回 -EFAULT
ret = copy_to_user(buf, tmp, count) ? -EFAULT : ret;
// 释放内核缓冲区
kfree(tmp);
return ret; // 返回读取的字节数或者错误码
}
static ssize_t i2cdev_write(struct file *file, const char __user *buf,
size_t count, loff_t *offset)
{
int ret;
char *tmp;
struct i2c_client *client = file->private_data;
// 限制写入数据的大小,防止超过8192字节
if (count > 8192)
count = 8192;
// 将用户空间的数据复制到内核空间
tmp = memdup_user(buf, count);
if (IS_ERR(tmp))
return PTR_ERR(tmp); // 内存分配或数据复制失败
pr_debug("i2c-dev: i2c-%d writing %zu bytes.\n",
iminor(file_inode(file)), count);
// 向I2C设备写入数据
ret = i2c_master_send(client, tmp, count); ------(2)
// 释放内核缓冲区
kfree(tmp);
return ret; // 返回写入的字节数或错误码
}
诶???怎么没有看到i2c_transfer函数呢,其实就在i2c_master_recv进而i2c_master_send内,这两个是i2c-core.c核心层提供给设备驱动的接口:
int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
{
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
int ret;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf;
ret = i2c_transfer(adap, &msg, 1);
/*
* If everything went ok (i.e. 1 msg received), return #bytes received,
* else error code.
*/
return (ret == 1) ? count : ret;
}
int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
{
int ret;
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.len = count;
msg.buf = (char *)buf;
ret = i2c_transfer(adap, &msg, 1);
/*
* If everything went ok (i.e. 1 msg transmitted), return #bytes
* transmitted, else error code.
*/
return (ret == 1) ? count : ret;
}
就不用解释吧,其实也很好懂了,设置i2c_msg msg,标志其从设备地址,控制器,读写标志位flags等,然后利用i2c_transfer发起传输。
3. 总结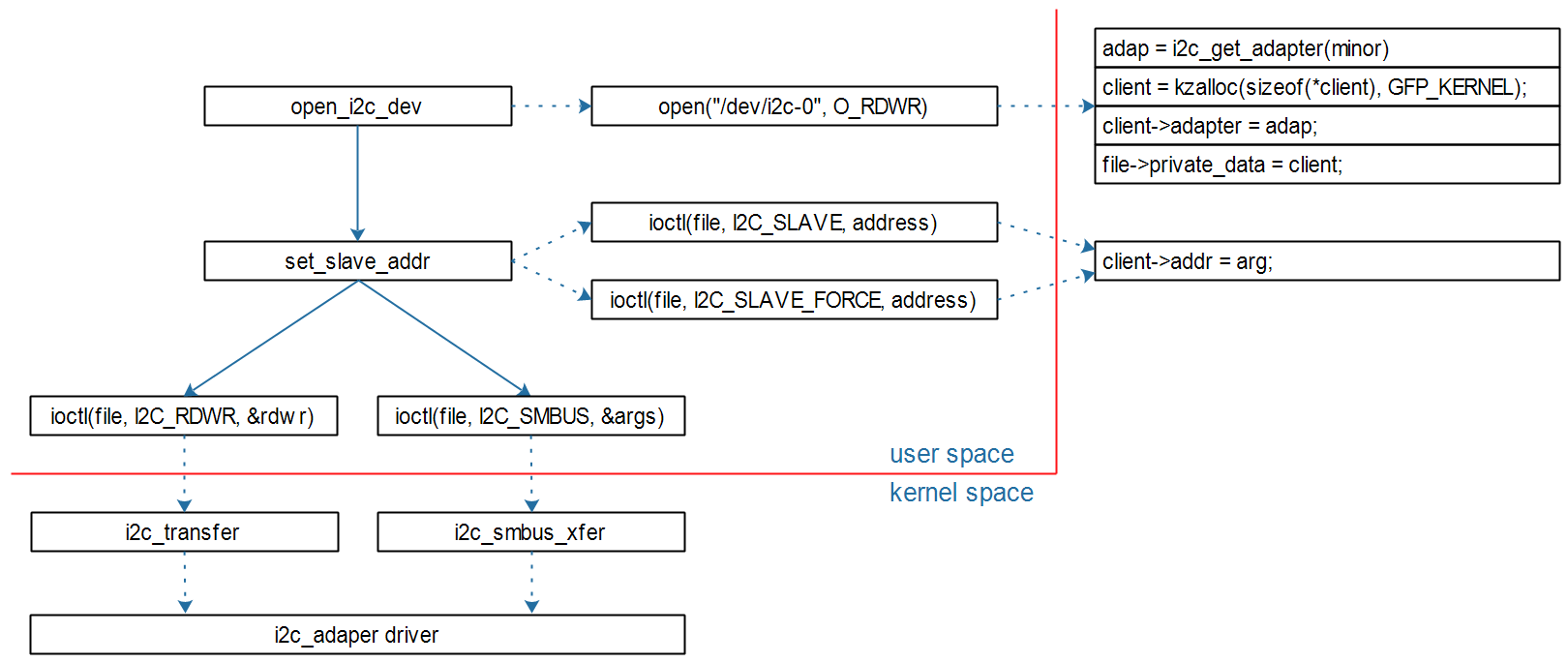
可以看出,发起i2c传输的函数最基本的就是要牢记:i2c_transfer和i2c_smbus_xfer,至于发起的是读还是写,就由msg.flags决定,关于msg结构体,在之前的文章中也有讲过,见上文 往期内容 。