OpenCV单目相机内参标定C++
基于OpenCV 实现单目相机内参标定:
a.使用OpenCV库实现内参标定过程。通过角点检测、亚像素角点定位、角点存储与三维坐标生成和摄像机标定分别获取左右相机的内参。
b.具体地,使用库函数检测两组图像(左右相机拍摄图像)中棋盘格的角点;对检测到的角点进行亚像素级别的精确化,以提高角点位置的准确性;根据左右相机拍摄的棋盘格图像及角点位置,计算出两个相机的内参矩阵及畸变系数;生成畸变校正和图像校正的映射表。
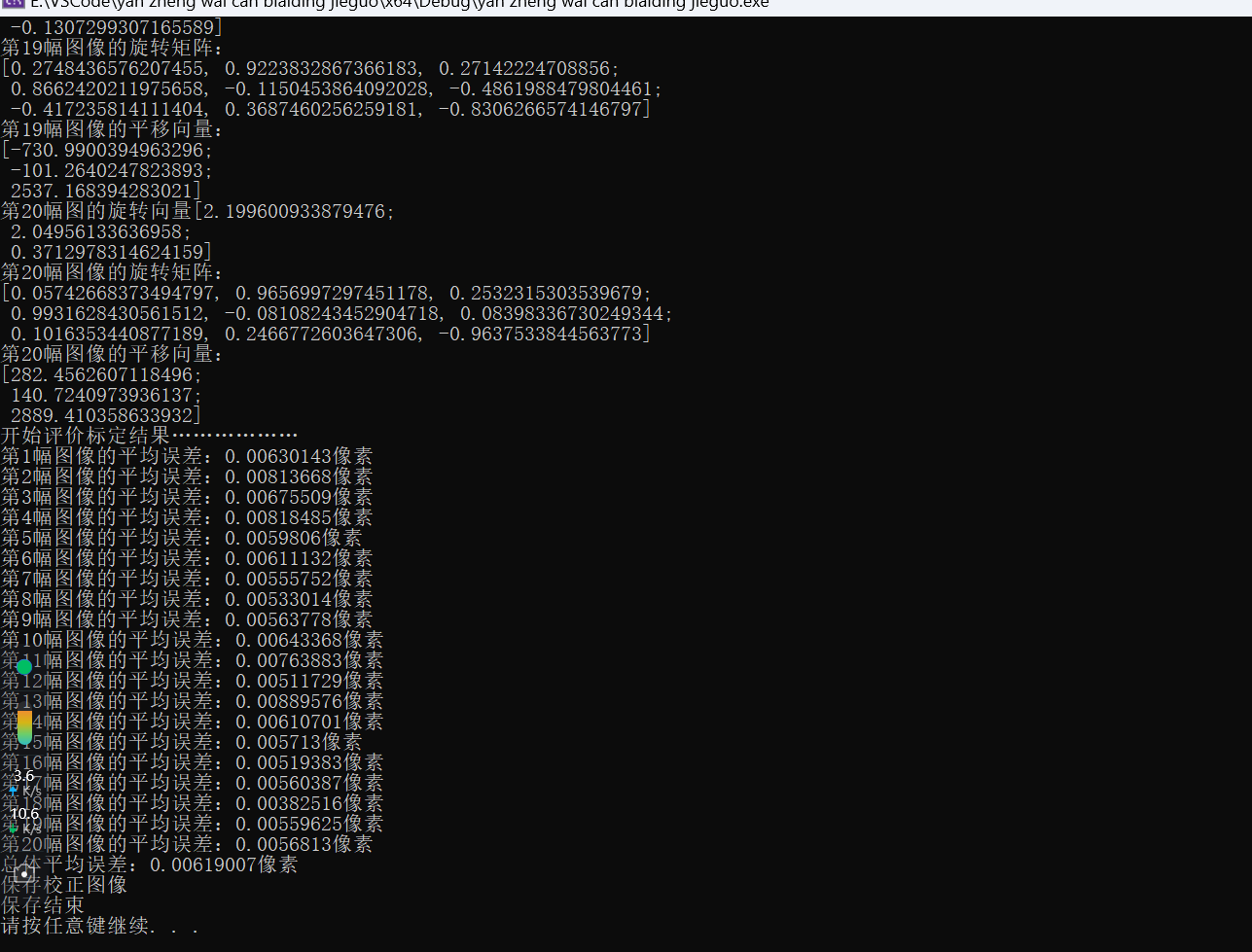
c.内参标定模块的输出是左右相机的内参矩阵和畸变系数,以及每幅图像的旋转向量和平移向量,最后计算并输出标定结果的总体平均误差,以评估标定过程的准确性。
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
#include<sstream>
#include<opencv2/imgproc/types_c.h>
#include <opencv2/core/utils/logger.hpp> //隐藏日志
using namespace std;
using namespace cv;
int main()
{
cv::utils::logging::setLogLevel(utils::logging::LOG_LEVEL_SILENT);//不再输出日志
//或
//utils::logging::setLogLevel(utils::logging::LOG_LEVEL_ERROR);//只输出错误日志
int image_count = 20;//检测的图片数量
Size image_size;
Size board_size = Size(11, 8);//图片上棋盘格(标定板)的内角点个数(行、列的角点数)
vector<Point2f> image_corners;//缓存每幅图像上检测到的角点
vector<vector<Point2f>> corners_Seq;//保存检测到的所有角点
vector<Mat> image_Seq;
int count = 0;
/*********************读入图像,检测角点********************************************/
for (int i = 0; i < image_count; i++)
{
//读入一系列图片
string imageFileName, imageFileName1;
stringstream StrStm;
StrStm << "left";
//StrStm << "F:/vsprojects2022/ConsoleApplication6/ConsoleApplication6/20241022/right";
StrStm << i + 1;
StrStm >> imageFileName;
StrStm.str("");//清除数据流,以便下次使用
imageFileName += ".bmp";
cout << imageFileName << endl;
Mat image = imread(imageFileName);
image_size = image.size();
Mat image_gray;
Mat dstImage1;
//cvtColor(image, image_gray, CV_RGB2GRAY); // opencv4版本中应改为 COLOR_RGB2GRAY
cvtColor(image, image_gray, COLOR_RGB2GRAY);
/*imshow("1",image_gray);
waitKey(0);*/
//检测标定板的角点
bool patternfound = findChessboardCorners(image, board_size, image_corners, CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE);
//+ CALIB_CB_FAST_CHECK);
if (!patternfound)
{
cout << "Can not find chessboard corners!" << endl;
return -1;
}
else
{
/* 亚像素精确化 */
cornerSubPix(image_gray, image_corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
/* 绘制检测到的角点并保存 */
/*drawChessboardCorners(image, Size(7, 7), image_corners, patternfound);//红色为先检测的点
resize(image, dstImage1, Size(image.cols / 5, image.rows / 5), 0, 0, INTER_LINEAR);
imshow("1", dstImage1);
waitKey(0);*/
Mat imageTemp = image.clone();
for (int j = 0; j < image_corners.size(); j++)
{
circle(imageTemp, image_corners[j], 3, Scalar(0, 0, 255), -1, 8, 0);
}
string imageFileName;
std::stringstream StrStm;
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_corner.jpg";
imwrite(imageFileName, imageTemp);//保存角点检测结果图
count = count + image_corners.size();
corners_Seq.push_back(image_corners);
}
image_Seq.push_back(image);
}
/****************************摄像机标定****************************************/
Size square_size = Size(50, 50); /**** 实际测量得到的标定板上每个棋盘格的大小 ****/
vector<vector<Point3f>> object_Points; /**** 保存标定板上角点的三维坐标 ****/
Mat image_points = Mat(1, count, CV_32FC2, Scalar::all(0)); /***** 保存提取的所有角点 *****/
vector<int> point_counts; /***** 每幅图像中角点的数量 ****/
Mat intrinsic_matrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /***** 摄像机内参数矩阵 ****/
//Mat distortion_coeffs = Mat(1, 4, CV_32FC1, Scalar::all(0)); /* 摄像机的4个畸变系数:k1,k2,p1,p2 */
Mat distortion_coeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); /* 摄像机的4个畸变系数:k1,k2,p1,p2 */
vector<cv::Mat> rotation_vectors; /* 每幅图像的旋转向量 */
vector<cv::Mat> translation_vectors; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
for (int t = 0; t < image_count; t++)
{
vector<Point3f> tempPointSet;
for (int i = 0; i < board_size.height; i++)
{
for (int j = 0; j < board_size.width; j++)
{
/* 假设标定板放在世界坐标系中z=0的平面上 */
Point3f tempPoint;
tempPoint.x = i * square_size.width;
tempPoint.y = j * square_size.height;
tempPoint.z = 0;
tempPointSet.push_back(tempPoint);
}
}
object_Points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,这里我们假设每幅图像中都可以看到完整的标定板 */
for (int i = 0; i < image_count; i++)
{
point_counts.push_back(board_size.width * board_size.height);
}
/*************************开始标定 *******************************/
//根据角点的世界坐标和像素坐标求参数
calibrateCamera(object_Points, corners_Seq, image_size, intrinsic_matrix, distortion_coeffs, rotation_vectors, translation_vectors, 0);
/***********************显示标定结果***************************/
Mat rotation_matrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
cout << "相机的内参矩阵" << intrinsic_matrix << endl;
cout << "相机的畸变系数" << distortion_coeffs << endl;
ofstream outfile;
outfile.open("内参标定结果.txt");
outfile << "相机的内参矩阵为:" << endl << intrinsic_matrix << endl;
outfile << "相机的畸变系数为:" << endl << distortion_coeffs << endl;
outfile.close();
cout << "输出每幅图的旋转向量和平移向量" << endl;
for (int i = 0; i < image_count; i++)
{
cout << "第" << i + 1 << "幅图的旋转向量" << rotation_vectors[i] << endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(rotation_vectors[i], rotation_matrix);
cout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
cout << rotation_matrix << endl;
cout << "第" << i + 1 << "幅图像的平移向量:" << endl;
cout << translation_vectors[i] << endl;
}
/******************对标定结果进行评价**********************************/
cout << "开始评价标定结果………………" << endl;
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /**** 保存重新计算得到的投影点 ****/
for (int i = 0; i < image_count; i++)
{
vector<Point3f> tempPointSet = object_Points[i];
/**** 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 ****/
projectPoints(tempPointSet, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1, tempImagePoint.size(), CV_32FC2);
Mat image_points2Mat = Mat(1, image_points2.size(), CV_32FC2);
for (size_t i = 0; i != tempImagePoint.size(); i++)
{
image_points2Mat.at<Vec2f>(0, i) = Vec2f(image_points2[i].x, image_points2[i].y);
tempImagePointMat.at<Vec2f>(0, i) = Vec2f(tempImagePoint[i].x, tempImagePoint[i].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err /= point_counts[i];
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_count << "像素" << endl;
Mat mapx = Mat(image_size, CV_32FC1);
Mat mapy = Mat(image_size, CV_32FC1);
Mat R = Mat::eye(3, 3, CV_32F);
cout << "保存校正图像" << endl;
for (int i = 0; i != image_count; i++)
{
Mat newCameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0));
//根据标定结果进行图像的修正
initUndistortRectifyMap(intrinsic_matrix, distortion_coeffs, R, getOptimalNewCameraMatrix(intrinsic_matrix, distortion_coeffs, image_size, 1, image_size, 0), image_size, CV_32FC1, mapx, mapy);
Mat t = image_Seq[i].clone();
cv::remap(image_Seq[i], t, mapx, mapy, INTER_LINEAR);
string imageFileName;
std::stringstream StrStm;
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_校正后图像.jpg";
imwrite(imageFileName, t);//保存畸变校正结果图
}
cout << "保存结束" << endl;
//waitKey(0);
system("pause");
return 0;
}
代码运行结果如下: