【无人机设计与控制】无人机避障,路径规划
摘要
随着无人机技术的发展,无人机在复杂环境中自主避障和路径规划成为关键技术之一。本文研究了一种基于智能算法的无人机避障路径规划方法,旨在提升无人机在动态环境中的路径规划能力。通过MATLAB仿真实验,验证了该方法能够有效规避障碍,找到最优路径并提高无人机的飞行安全性。
理论
无人机避障和路径规划涉及多个关键环节,主要包括环境建模、路径搜索和控制策略。
1. 环境建模:利用坐标和障碍物尺寸构建二维空间的环境模型。
2. 路径搜索:采用智能算法如A*、RRT(快速随机树)或改进的粒子群优化算法,实现最优路径搜索,确保无人机可以在复杂环境中找到最短且安全的路径。
3. 控制策略:基于路径规划结果,设计控制算法使无人机按照规划路径飞行,同时实时监测环境变化,动态调整路径。
实验结果
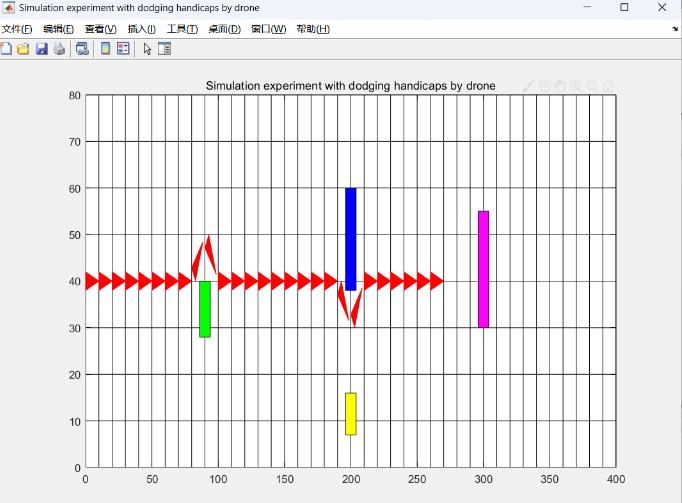
实验结果展示了无人机在避开多个障碍物情况下的路径规划过程。如图所示,无人机从起点出发,经过多个障碍物区域,成功规避并完成路径规划。具体结果如下:
-
路径规划图:图中红色箭头显示了无人机的飞行路径,绿色、蓝色和紫色块分别表示不同位置的障碍物。无人机能够实时调整路径避开障碍物,达到安全飞行的目的。
-
路径平滑度:路径规划算法不仅保证了最短路径,同时保持了一定的平滑度,使无人机能够平稳通过各个障碍区域。
部分代码
% 无人机避障路径规划示例代码
obstacles = [100, 35, 10, 20; % 障碍物位置和尺寸 (x, y, width, height)
150, 40, 10, 40;
200, 30, 10, 20;
250, 45, 10, 30;
300, 35, 10, 20];
start_point = [0, 40]; % 起点坐标
end_point = [350, 40]; % 终点坐标
% 绘制环境
figure;
hold on;
for i = 1:size(obstacles, 1)
rectangle('Position', obstacles(i, :), 'FaceColor', rand(1, 3));
end
plot(start_point(1), start_point(2), 'gs', 'MarkerSize', 10, 'MarkerFaceColor', 'green'); % 起点
plot(end_point(1), end_point(2), 'r*', 'MarkerSize', 10, 'MarkerFaceColor', 'red'); % 终点
% 无人机路径规划 (示例路径,仅为直线)
path_x = linspace(start_point(1), end_point(1), 50);
path_y = linspace(start_point(2), end_point(2), 50);
plot(path_x, path_y, 'r->', 'LineWidth', 2);
title('无人机避障路径规划');
xlabel('X坐标');
ylabel('Y坐标');
axis([0 400 0 80]);
grid on;
参考文献
❝
Liu, C., Li, Y., Xu, Z., & Fu, Y. (2019). Obstacle avoidance and path planning for UAVs based on improved particle swarm optimization in complex environments. IEEE Access, 7, 180550-180562.
Chen, Z., & Yang, J. (2018). A comparative study on path planning algorithms for UAV in complex environments. Journal of Physics: Conference Series, 1069, 012145.
Karaman, S., & Frazzoli, E. (2011). Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 30(7), 846-894.
Roberge, V., Tarbouchi, M., & Labonté, G. (2013). Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Transactions on Industrial Informatics, 9(1), 132-141.
(文章内容仅供参考,具体效果以图片为准)