大语言模型在交通领域的应用分析

大语言模型在交通领域的研究进展
前言:
大语言模型(Large Language Models, LLMs)如 GPT (Generative Pre-trained Transformer) 系列,BERT (Bidirectional Encoder Representations from Transformers) 和其他基于 Transformer 的模型,近年来在人工智能领域取得了显著的进展。这些模型通过在大规模文本数据上进行预训练,学习了语言的深层次结构和语义,从而能够在没有特定任务训练的情况下,完成多种语言理解和生成任务。
LLM的强大能力使其在如金融、法律、交通、教育等领域得到了广泛的探索和应用。目前在交叉领域对LLM的研究和应用从方法的角度来说可以分为两块:
- LLM Agent:将LLM塑造为决策智能体,利用提示词工程(Prompt Engineering)提升其决策能力。
- LLM微调是指将LLM视为编码器对输入特征进行特征提取,之后连接全连接层,针对特定任务进行微调。
下面我们将从上述提到的两个方向来对交通领域使用LLM的研究进行简单介绍。
LLM Agent
[TIV 2024] DriveLLM: Large Language Models 引领全自动驾驶之路。
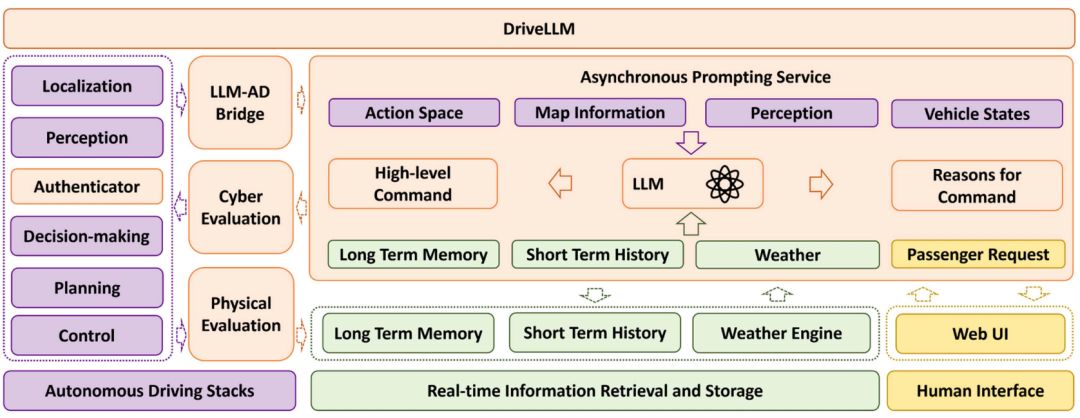
这篇文章探讨了名为DriveLLM的决策框架,它将大型语言模型(LLMs)与自动驾驶技术结合,以实现常识推理。以下是本文的重点和贡献:
- "DriveLLM,革新之选。它摒弃了传统自动驾驶决策系统中常识推理的空白,让系统在陌生环境中识别风险并洞悉他人意图。"
- 实地案例研究揭示:该框架在处理复杂场景(包括困难的边缘案例)方面胜过传统决策方法,专业且简洁的文章令人信服。
- 实证评估:通过实证评估显示,该框架能够正确响应复杂的人类指令。
总的来说,DriveLLM通过运用常识推理和优化反馈机制,显著提高了自动驾驶决策系统在复杂动态环境中的性能和稳定性。

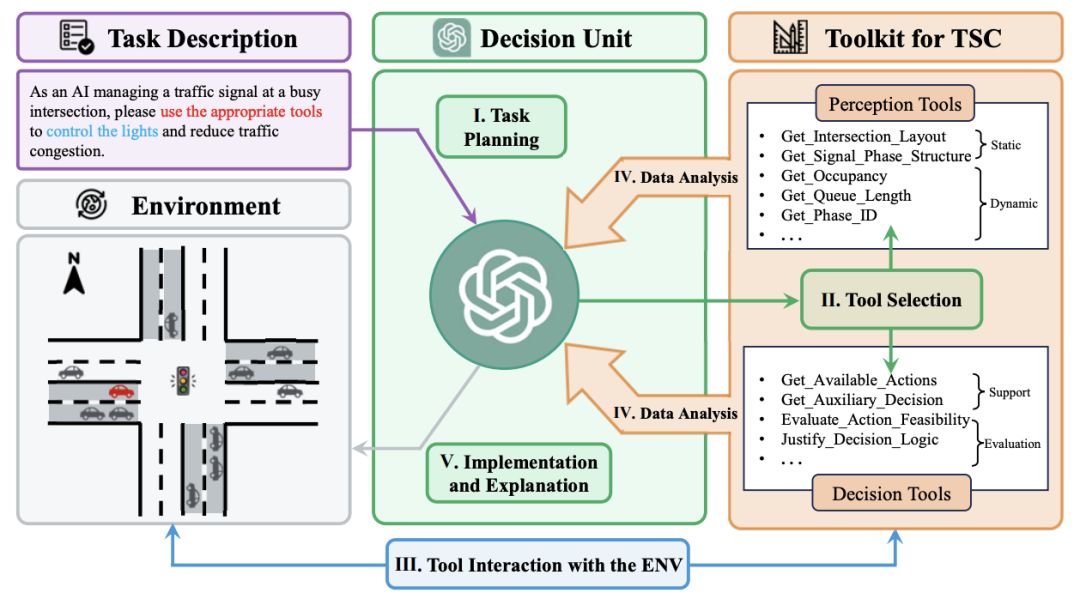
[arXiv 2024] "LLM-Assisted Light: Harnessing the Power of Large Language Models for Human-Imitative Traffic Signal Control in Urban Chaos"
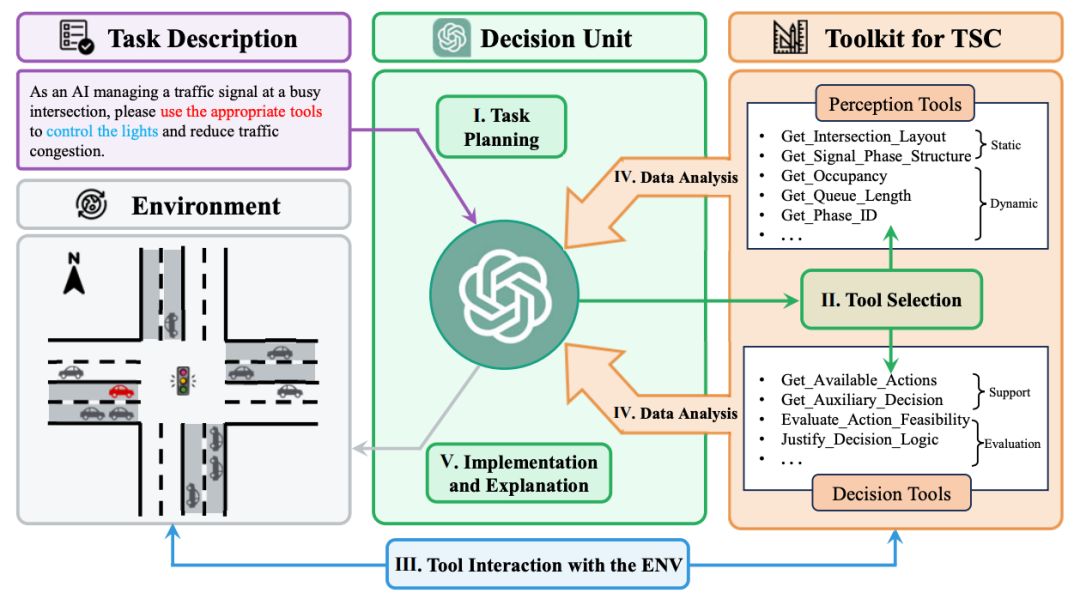
针对大城市中的交通拥堵问题提出了一种创新的方法,将大语言模型(LLMs)引入到交通信号控制(TSC)系统中,以应对传统TSC系统在处理复杂和多变的城市交通流时的不足。传统的TSC系统主要基于规则算法或强化学习(RL),在应对不熟悉的场景时适应能力有限,导致在管理城市交通流的复杂性和多样性方面表现不足。
本文提出了一种混合框架,将LLMs与一套感知和决策工具相结合,使其能够处理静态和动态的交通信息。LLMs在决策过程中处于核心位置,结合外部交通数据和已有的TSC方法进行决策。研究开发了一个模拟平台来验证所提出框架的有效性。模拟结果表明,该系统在不需要额外训练的情况下,能够适应多种交通环境。
特别是在传感器故障(SO)情况下,所提出的方法通过减少平均等待时间,显著优于传统的RL系统。这项研究在TSC策略方面取得了显著进展,展示了LLMs在实际动态交通管理中的潜力,预示着它们可能会革新未来的交通管理系统。
"2024年arXiv论文探讨了如何将空间优化与大型语言模型相结合,以实现开放域城市行程规划。通过这种方法,我们可以更有效地规划城市旅行路线,提高出行效率。"
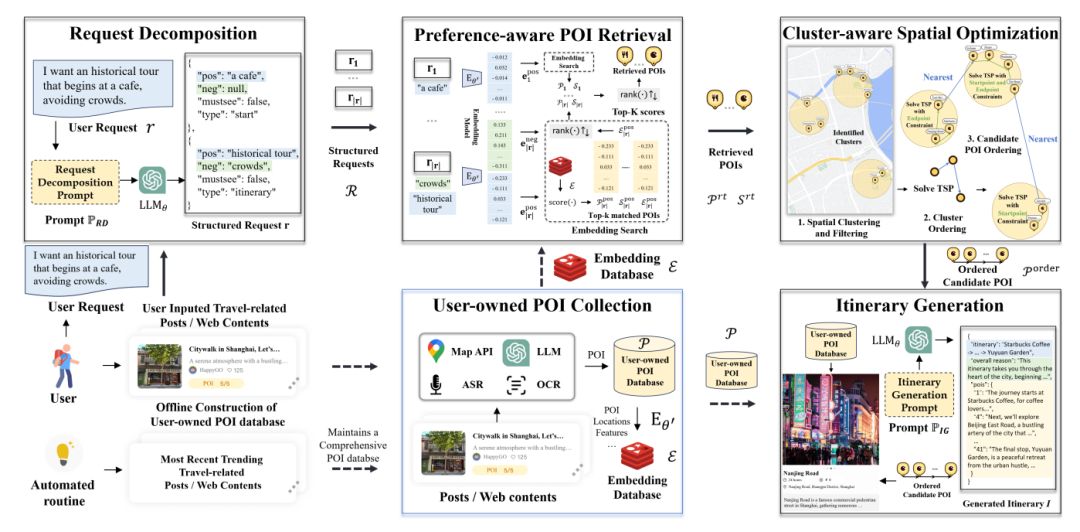
这篇研究首次提出了开放域城市行程规划(OUIP)的任务,直接根据用户用自然语言描述的需求生成行程。OUIP不同于传统的行程规划,它允许用户表达更详细的需求,实现真正的个性化。尽管大语言模型(LLMs)在处理各种任务上表现出潜力,但由于无法实时获取信息、知识不完整以及缺乏空间意识,它们无法独立提供令人满意的OUIP体验。为此,本文提出了ItiNera,一个结合空间优化和LLMs的OUIP系统,为用户提供基于需求定制的城市行程服务。具体来说,作者开发了一个基于LLM的流程,用于提取和更新兴趣点(POI)特征,创建用户专属的POI数据库。
对于每个用户请求,作者利用LLM与基于嵌入的模块协作,从用户的POI数据库中检索候选POI,然后使用空间优化模块对这些POI进行排序,最后由LLM生成个性化且空间连贯的行程。这项研究首次将LLMs集成到行程规划解决方案中。大量离线数据集实验和在线主观评估表明,该系统在提供响应性和空间连贯的行程方面优于当前的LLM解决方案。该系统已在TuTu在线旅游服务中部署,并吸引了成千上万的用户进行城市旅行规划。
[TIV 2023] VistaGPT:一种用于智能运输自动化车辆的生成式并行Transformer技术,助力实现交通智能化。
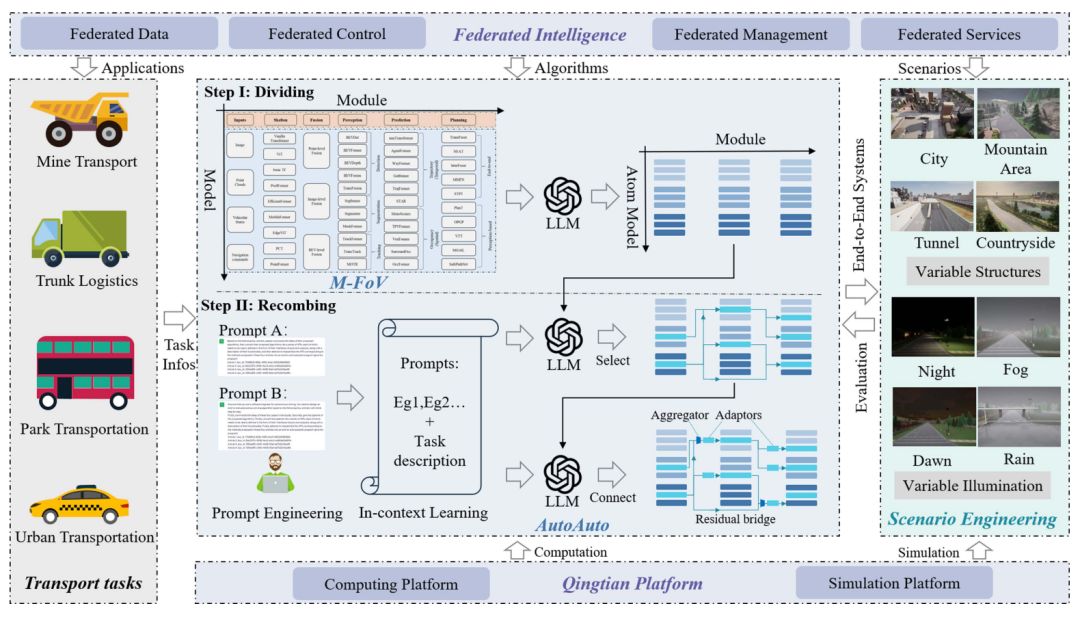
这项研究针对异构车辆自动化系统在技术共享和系统泛化能力方面的挑战,提出了一个基于Transformer的统一框架VistaGPT。VistaGPT由车辆Transformer模块联合体(M-FoV)和自动驾驶系统自动组合(AutoAuto)组成,旨在克服系统和模块层面的信息障碍。M-FoV以模块化方式收集和组织基于Transformer的模型,提供多样性和灵活性以促进系统集成。AutoAuto利用大语言模型(LLMs),采用“分解与重组”策略,自动组合端到端的自动驾驶系统。
此外,研究部署了场景工程系统评估组合系统,并通过联邦智能贡献多样化的训练样本和应用,为AutoAuto的优化提供系统反馈。凭借其容量、可扩展性和多样性,VistaGPT为交通自动化提供了一种新范式,促进了虚拟与现实交互的并行驾驶,并推进了“6S”目标的实现。

"TIV 2024" 揭示了一款名为 "ChatGPT-Based Scenario Engineer" 的创新工具,该工具为轨迹预测提供了全新的场景生成框架。
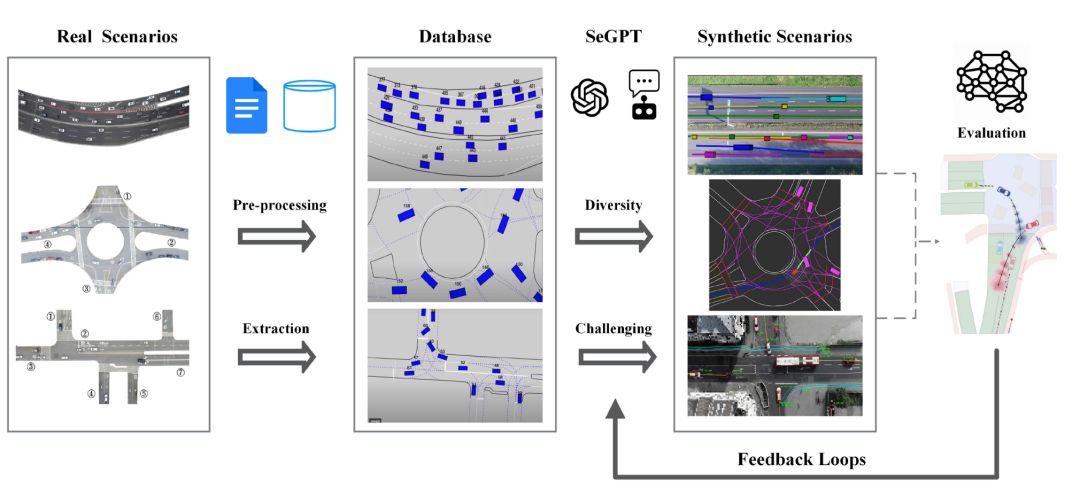
针对智能车辆领域的挑战,SeGPT创新框架应运而生。借助ChatGPT的强大能力,SeGPT通过定义轨迹场景和设计提示工程,成功生成复杂且富有挑战性的场景。结合“三模式”、基础模型、车辆操作系统及其他先进基础设施,SeGPT为实现更高水平的自动驾驶奠定了坚实基础。实验结果显示,SeGPT在生成多样化场景方面表现卓越,极大地推动了轨迹预测算法的发展。
LLM 微调

"UrbanGPT: Spatial-Temporal Large Language Models (2024) revolutionize the way we approach language processing, combining both spatial and temporal dimensions for unprecedented accuracy."
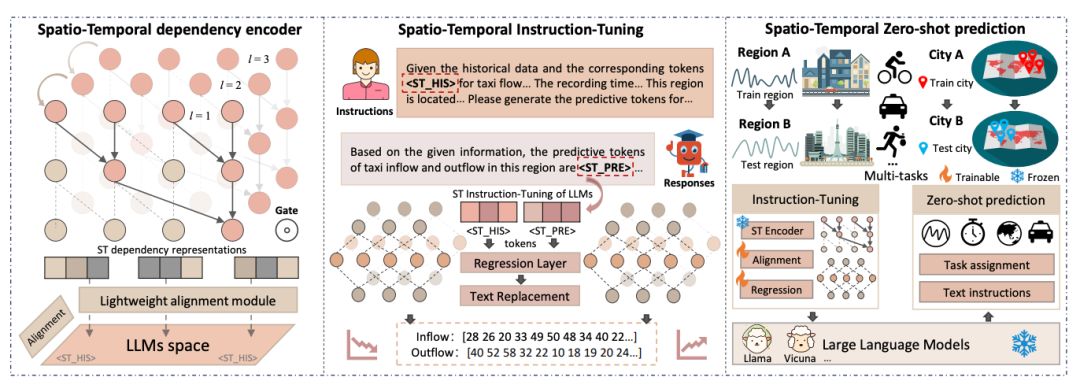
这篇研究旨在解决时空预测中的数据稀缺问题,通过借鉴大语言模型(LLMs)的成功经验,提出了一种名为UrbanGPT的时空预测模型。UrbanGPT将时空依赖编码器与指令微调范式相结合,使LLMs能够理解复杂的时空依赖关系,从而在数据稀缺的情况下进行更全面和准确的预测。
研究通过对多个公共数据集进行广泛实验,涵盖不同的时空预测任务,验证了该方法的有效性。结果表明,UrbanGPT在各种下游城市任务中表现出色,特别是在零样本场景中,显著优于现有的最先进基线模型。这些发现展示了构建用于时空学习的大语言模型的潜力。
-对此,您有什么看法见解?-
-欢迎在评论区留言探讨和分享。-