如何使用OpenCV和Python进行相机校准
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 23.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 24.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 26.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 28.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 30.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
| 31.【基于YOLOv8深度学习的100种中草药智能识别系统】 | 32.【基于YOLOv8深度学习的102种花卉智能识别系统】 |
| 33.【基于YOLOv8深度学习的100种蝴蝶智能识别系统】 | 34.【基于YOLOv8深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于YOLOv8深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于YOLOv8深度学习的复杂场景下船舶目标检测系统】 | 38.【基于YOLOv8深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于YOLOv8深度学习的智能道路裂缝检测与分析系统】 | 40.【基于YOLOv8深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于YOLOv8深度学习的遥感地理空间物体检测系统】 | 42.【基于YOLOv8深度学习的无人机视角地面物体检测系统】 |
| 43.【基于YOLOv8深度学习的木薯病害智能诊断与防治系统】 | 44.【基于YOLOv8深度学习的野外火焰烟雾检测系统】 |
| 45.【基于YOLOv8深度学习的脑肿瘤智能检测系统】 | 46.【基于YOLOv8深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于YOLOv8深度学习的橙子病害智能诊断与防治系统】 | 48.【基于深度学习的车辆检测追踪与流量计数系统】 |
| 49.【基于深度学习的行人检测追踪与双向流量计数系统】 | 50.【基于深度学习的反光衣检测与预警系统】 |
| 51.【基于深度学习的危险区域人员闯入检测与报警系统】 | 52.【基于深度学习的高密度人脸智能检测与统计系统】 |
| 53.【基于深度学习的CT扫描图像肾结石智能检测系统】 | 54.【基于深度学习的水果智能检测系统】 |
| 55.【基于深度学习的水果质量好坏智能检测系统】 | 56.【基于深度学习的蔬菜目标检测与识别系统】 |
| 57.【基于深度学习的非机动车驾驶员头盔检测系统】 | 58.【太基于深度学习的阳能电池板检测与分析系统】 |
| 59.【基于深度学习的工业螺栓螺母检测】 | 60.【基于深度学习的金属焊缝缺陷检测系统】 |
| 61.【基于深度学习的链条缺陷检测与识别系统】 | 62.【基于深度学习的交通信号灯检测识别】 |
| 63.【基于深度学习的草莓成熟度检测与识别系统】 | 64.【基于深度学习的水下海生物检测识别系统】 |
| 65.【基于深度学习的道路交通事故检测识别系统】 | 66.【基于深度学习的安检X光危险品检测与识别系统】 |
| 67.【基于深度学习的农作物类别检测与识别系统】 | 68.【基于深度学习的危险驾驶行为检测识别系统】 |
| 69.【基于深度学习的维修工具检测识别系统】 | 70.【基于深度学习的维修工具检测识别系统】 |
| 71.【基于深度学习的建筑墙面损伤检测系统】 | 72.【基于深度学习的煤矿传送带异物检测系统】 |
| 73.【基于深度学习的老鼠智能检测系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
- 引言
- 什么是相机校准?
- 如何进行相机校准?
- 在Python中使用OpenCV进行相机校准
- 代码的逐行解释
- **校准后将获得的值**

引言
摄像机标定是通过确定摄像机的内参数(焦距、光学中心、畸变系数)和外参数(摄像机位置和方向)来提高图像在真实的世界中的几何精度的过程。该过程校正相机捕获的图像中的失真,从而允许相机准确地感知真实的世界中的距离、角度和对象。一个很好的例子是校正鱼眼相机拍摄的图像。
什么是相机校准?
照相机通过将真实的世界投影到二维平面上来捕捉它。然而,由于光学元件和透镜的结构特性,这些图像中可能会出现误差。最常见的错误是扭曲和透视错误。相机校准通过计算相机的内在和外在参数来校正这些误差,从而允许更准确的测量和几何计算。
关键参数:
- 内在参数:
- 焦距:根据透镜的焦距确定图像的大小。
- 光学中心(主点):相机透镜的中心点。
- 畸变系数:用于校正透镜畸变,如桶形畸变和枕形畸变。(You将在图1中清楚地看到这一点。)
注:术语“失真”是指镜头引起的误差,如翘曲或弯曲。
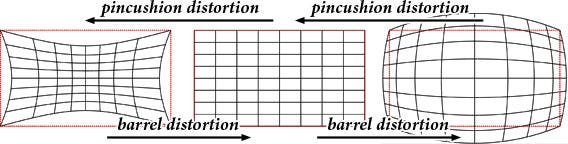
图1.枕形失真和桶形失真。
2.外部参数:
- 相机位置:相机相对于世界的位置(x,y,z坐标)。
- 相机方向:相机相对于世界的视角(旋转角度)。

图2.收集用于校准的视觉数据。
如何进行相机校准?
通常,已知的几何图案(诸如棋盘)用于相机校准。**该图案的已知尺寸和位置用作检测相机图像中的失真的参考。**校准过程包括以下步骤:
- 图像采集:要执行相机校准,您需要从不同角度拍摄一组至少15张棋盘图案的图像。该图案的角点有助于检测图像中的失真。
- 角点检测:在每个图像中检测棋盘图案的角点。这些角点的正确检测对于精确校准至关重要。
- 内外参数计算:根据摄像机图像中角点与其真实坐标的差异,优化计算摄像机的内外参数。该计算通常使用AI算法或数学优化技术来完成。
- 失真校正:计算出的参数用于校正图像中的失真,消除非线性透镜失真。
- 验证:为了测试校准的准确性,使用相机拍摄新图像,并应用校准参数来校正图像。然后观察校正的准确性。


图3.添加桶形失真。
在Python中使用OpenCV进行相机校准
OpenCV是Python中最常用的相机校准库之一。OpenCV为相机校准和畸变校正提供了必要的功能。下面是一个简单的校准示例:
import cv2
import numpy as np
import glob
# Dimensions of the chessboard (number of internal corners)
grid_size = (9, 6)
# The real-world size of each square (2 cm)
square_size = 2 # cm
# 3D world coordinates of the chessboard
obj_points = np.zeros((grid_size[0] * grid_size[1], 3), np.float32)
obj_points[:, :2] = np.mgrid[0:grid_size[0], 0:grid_size[1]].T.reshape(-1, 2) * square_size
# Lists for storing the necessary points for calibration
object_points = [] # 3D world coordinates
image_points = [] # 2D image coordinates
# Folder where calibration images are stored
images = glob.glob('calibration_images/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Find the corners of the chessboard
ret, corners = cv2.findChessboardCorners(gray, grid_size, None)
if ret:
object_points.append(obj_points)
image_points.append(corners)
# Visualize the corners
cv2.drawChessboardCorners(img, grid_size, corners, ret)
cv2.imshow('Chessboard Corners', img)
cv2.waitKey(500)
cv2.destroyAllWindows()
# Perform calibration
ret, camera_matrix, dist_coeffs, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, gray.shape[::-1], None, None)
# Save the camera matrix and distortion coefficients
np.savez('calibration_data.npz', camera_matrix=camera_matrix, dist_coeffs=dist_coeffs)
# Print the calibration results
print("Camera Matrix:\n", camera_matrix)
print("Distortion Coefficients:\n", dist_coeffs)
代码的逐行解释
import cv2
import numpy as np
import glob
- cv2(OpenCV):我们导入OpenCV,一个用于图像处理的库。该库提供了摄像机标定和图像处理中的许多函数。
- numpy(np):我们导入NumPy来轻松执行数值运算和使用数组。
- glob:用于组织文件路径并列出文件夹中的文件。此处用于抓取包含校准图像的文件夹中的所有图像。
grid_size = (9, 6)
- grid_size:指定棋盘上内角点的数量。在这个例子中,棋盘图案具有9列和6行角点(9列 * 6行= 54个角点)。此值应与实际使用的棋盘相匹配。
square_size = 2 # cm
- square_size:棋盘上的每个正方形都被设置为具有2 cm的真实世界边长。
obj_points = np.zeros((grid_size[0] * grid_size[1], 3), np.float32)
obj_points[:, :2] = np.mgrid[0:grid_size[0], 0:grid_size[1]].T.reshape(-1, 2) * square_size
- obj_points:我们在真实世界坐标中创建棋盘上角的3D位置。每个角点的Z轴值均设置为0。
- np.zeros((grid_size[0] * grid_size[1],3),np.float32):为每个角点创建具有(x,y,z)坐标的3D空矩阵。
- **np.mgrid[0:grid_size[0],0:grid_size[1]]:**生成棋盘上角点的(x,y)坐标。
注:
mgrid是一个NumPy函数,用于创建多维网格结构,语法为mgrid[start:end:step]。举例来说:
Two-Dimensional Grid (Mesh)
x, y = np.mgrid[0:3, 0:3]
print("X:\n", x)
print("Y:\n", y)
Output:
X:
[[0 0 0]
[1 1 1]
[2 2 2]]
Y:
[[0 1 2]
[0 1 2]
[0 1 2]]
- T.reshape(-1,2):将二维角点合并为单个矩阵。
object_points = [] # 3D world coordinates
image_points = [] # 2D image coordinates
- object_points:一个列表,用于存储每个图像的3D真实棋盘角点。
- image_points:用于存储每个图像的2D图像角点的列表。
images = glob.glob('calibration_images/*.jpg')
- images:查找
calibration_images文件夹中的所有.jpg文件并将其存储在列表中。这些是用于校准的棋盘图案图像。
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- 此循环处理每个图像:
- cv2.imread(fname):读取
fname指定的图像。 - cv2.cvtColor(img,cv2.COLOR_BGR2GRAY):将读取的图像从彩色(BGR)转换为灰度。在灰度图像上检测棋盘图案更容易。
ret, corners = cv2.findChessboardCorners(gray, grid_size, None)
- cv2.findChessboardCorners:尝试查找灰度图像中的棋盘角。
- ret:一个标志(True/False),表示棋盘角是否被成功找到。
- corners:图像中检测到的角点的2D坐标。
if ret:
object_points.append(obj_points)
image_points.append(corners)
- 如果ret为
True,表示棋盘角已成功找到: - object_points.append(obj_points):将3D真实世界坐标添加到列表中。
- image_points.append(corners):将2D图像坐标添加到列表中。
cv2.drawChessboardCorners(img, grid_size, corners, ret)
cv2.imshow('Chessboard Corners', img)
cv2.waitKey(500)
- cv2.drawChessboardCorners:通过在图像上绘制线条来可视化检测到的棋盘角点。
- cv2.imshow:在新窗口中显示带有检测到的角点的图像。
- cv2.waitKey(500):图像显示500毫秒(0.5秒)。
cv2.destroyAllWindows()
- cv2.destroyAllWindows:关闭所有打开的窗口。
ret, camera_matrix, dist_coeffs, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, gray.shape[::-1], camera_matrix=None, dist_coeffs=None, flags=None, criteria=None)
- camera_matrix:包含相机内部参数(焦距、光学中心等)的矩阵。
- dist_coeffs:透镜畸变系数。
- rvecs:旋转向量。
- tvecs:平移向量。
- **cv2.calibrate Camera:执行相机校准。**此函数根据真实世界3D点与图像中对应的2D点之间的关系计算相机参数。
- object_points:3D真实世界坐标。
- image_points:图像中的2D投影坐标。
- gray. shape [::-1]:图像分辨率(宽度和高度)。
- **camera_matrix(默认值:None)-calibrate相机侧:这是一个3x3矩阵,表示相机的内部参数(焦距、主点等)。**如果提供为"无",则这些参数将由函数计算。如果你有一个已知的相机矩阵,你可以在这里提供它。
- **dist_coeffs(默认值:None)-calibrate相机侧:这是表示失真系数(失真)的向量。**如果设置为"无",则将通过函数计算失真系数。
注意:提供
**camera_matrix=None**和**dist_coeffs=None****的原因是您希望计算这些参数并将其作为校准结果获取。**在代码中,您试图从特定图像中推导出相机的内部参数和透镜失真系数(camera_matrix和dist_coeffs)。
- flags(可选):这些是用于在校准期间指定某些选项的标志。例如:
cv2.CALIB_USE_INTRINSIC_GUESS:启用内部参数(相机矩阵和失真系数)的初始猜测。cv2.CALIB_FIX_PRINCIPAL_POINT:修复主点。cv2.CALIB_FIX_ASPECT_RATIO:修复纵横比。 - criteria(可选):指定迭代条件。这是优化过程的停止条件,通常与
cv2.TERM_CRITERIA_MAX_ITER和cv2.TERM_CRITERIA_EPS等选项一起使用。
np.savez('calibration_data.npz', camera_matrix=camera_matrix, dist_coeffs=dist_coeffs)
- savez:将计算的相机矩阵和失真系数保存到一个名为
calibration_data.npz的文件中。此文件允许您以后重复使用校准参数。
print("Camera Matrix:\n", camera_matrix)
print("Distortion Coefficients:\n", dist_coeffs)
- print:在屏幕上显示camera_matrix(内部参数)和失真系数。
此代码使用OpenCV执行相机校准并保存结果。摄像机校准对于校正图像中的失真和进行精确测量至关重要。
校准后将获得的值
在此过程结束时,函数将计算并返回camera_matrix和dist_coeffs:
摄象机矩阵
该矩阵包含相机的内部参数(焦距、主点等)。它用于了解摄影机的透镜特性和透视变换。它是一个3x3矩阵,可以看起来像这样:

这里,f_x和f_y是相机的焦距(以像素为单位),c_x和c_y是图像平面上的主点(通常是图像的中心)的像素坐标。
什么是最重要的一点?主点表示图像的光学中心,并定义相机的透镜和图像平面之间的关系。如果相机的光轴偏离中心,则可以使用c_x和c_y坐标来检测该偏移。
范例:
假设您的相机分辨率为1920x1080像素,校准后,您将获得以下camera_matrix:
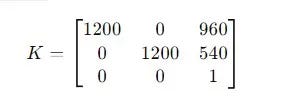
- f_x = 1200和f_y = 1200:沿水平轴和垂直轴的焦距沿着。
- c_x = 960和c_y = 540:主点的坐标,位于图像平面的中心(960和540表示中心点,因为您的分辨率为1920x1080)。
分布系数
它包含透镜的畸变系数。这些系数用于校正透镜的几何失真(例如,桶形失真或枕形失真)。
通常,该向量包含以下系数:

这些系数:
- k_1、k_2、k_3:径向畸变系数。这些用于校正桶形或枕形失真。如果图像中的失真随着它们远离中心而变得更加明显,则这是径向失真,并且k_1、k_2和k_3校正该失真。k_1校正图像中心附近的失真。k_2校正朝向图像边缘的较大失真。k_3在离中心最远的点处,特别是在边缘处,对失真进行微调。
桶形失真:向边缘扩展的失真。
枕形失真:向内收缩到边缘的失真。
2. p_1、p_2:切向失真系数。当透镜与传感器未完全对准时,会发生这种失真。如果透镜没有完全居中或具有轴偏移,则图像倾向于向边缘偏移。p_1和p_2校正该倾斜。p_1校正沿x轴(水平面)的沿着偏移或失真。P_2校正沿y轴(垂直平面)的沿着偏移或失真。
什么是径向和切向失真?
径向失真:这些失真导致图像中的直线在远离中心时弯曲。k_1、k_2和k_3用于校正这些曲线。
切向畸变:当透镜与传感器不完全垂直时产生的畸变,导致图像向边缘偏移。p_1和p_2校正这些移位。
3. k_4、k_5、k_6***(可选)***:高阶径向畸变系数。这些参数用于校正更复杂的畸变,例如来自非常广角镜头的畸变。它们通常不用于标准校准,但可以在需要更精确的校正时应用。
范例:
dist_coeffs = [0.1, -0.25, 0.001, 0.002, 0.03]
- k_1 = 0.1和k_2 = -0.25:用于校正径向失真的系数。
- p_1 = 0.001和p_2 = 0.002:用于校正切向失真的系数。
- k_3 = 0.03:高阶径向畸变系数。
K和P值越大,校正越强。随着它们的减少,校正的效果也会减弱。

好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!