【无人机设计与控制】无人机集群路径规划:5种最新优化算法(ECO、AOA、SFOA、MGO、PLO)求解无人机集群路径规划
摘要
本文提出了基于无人机集群路径规划的研究,通过使用五种最新优化算法(ECO、AOA、SFOA、MGO、PLO)进行求解。这些算法主要优化无人机在复杂环境中的路径,以实现多目标规划问题的高效解。实验结果表明,不同算法在收敛速度、路径长度和能耗方面具有不同的优势。本文详细讨论了每种算法的性能表现,并通过数值实验进行验证。
理论
无人机集群路径规划问题可以抽象为优化问题,目标是通过优化算法找到从起点到终点的最优路径,同时避开障碍物并最小化路径成本。其数学模型为:
1. 目标函数:最小化路径总成本,包括路径长度和能耗。
2. 约束条件:
-
避开障碍物;
-
满足无人机飞行性能的约束条件;
-
遵守通信链路的限制。
五种优化算法
-
ECO (生态优化算法): 基于生态系统中的食物链和协同进化机制,强调个体之间的信息交互。
-
AOA (自适应优化算法):通过动态调整参数,提高算法在不同阶段的寻优能力。
-
SFOA (模糊优化算法):结合模糊逻辑和多目标优化,增强了在复杂环境下的寻优效果。
-
MGO (元启发式算法):利用全局和局部搜索相结合的策略,提高收敛速度。
-
PLO (粒子优化算法):基于粒子群优化算法,适合处理大规模搜索空间。
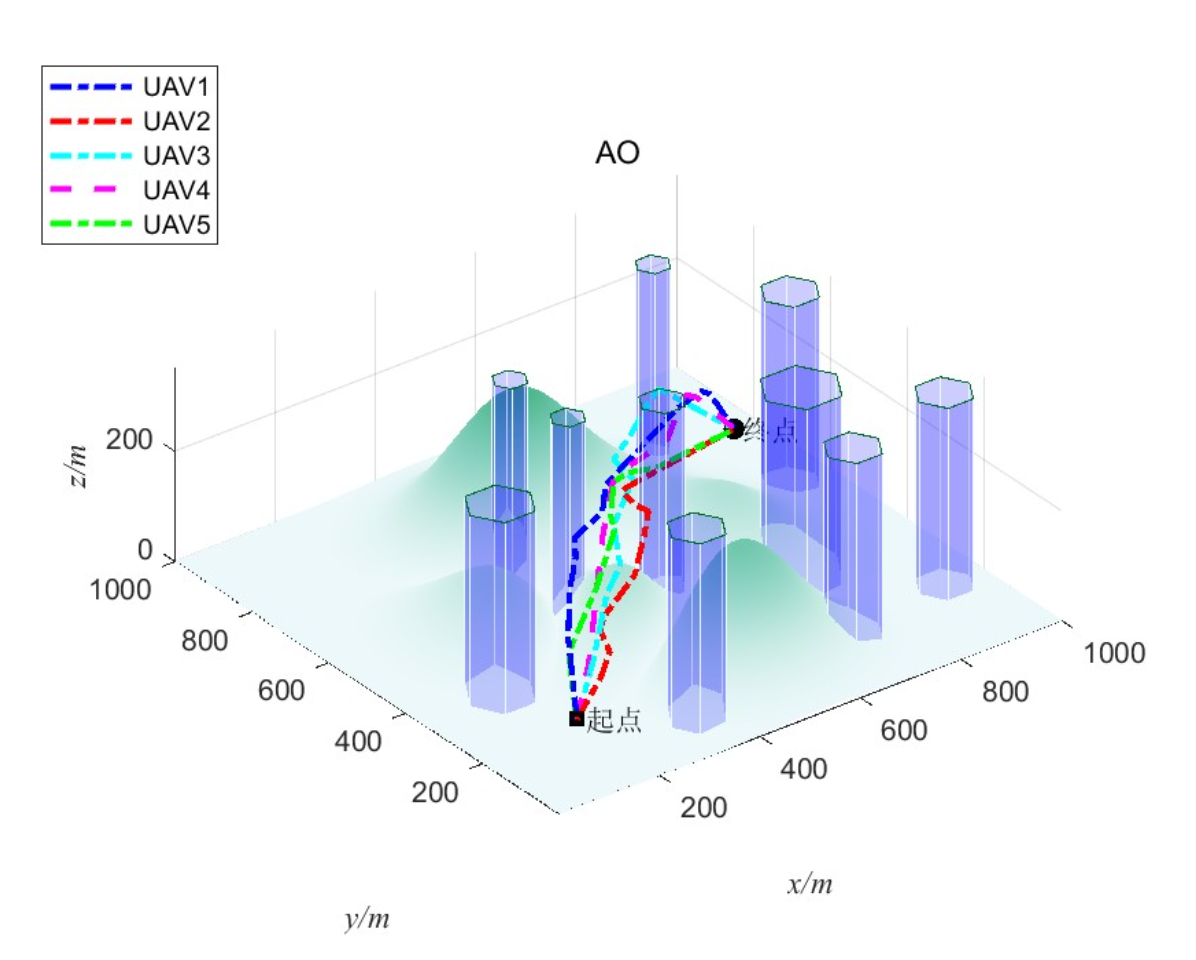
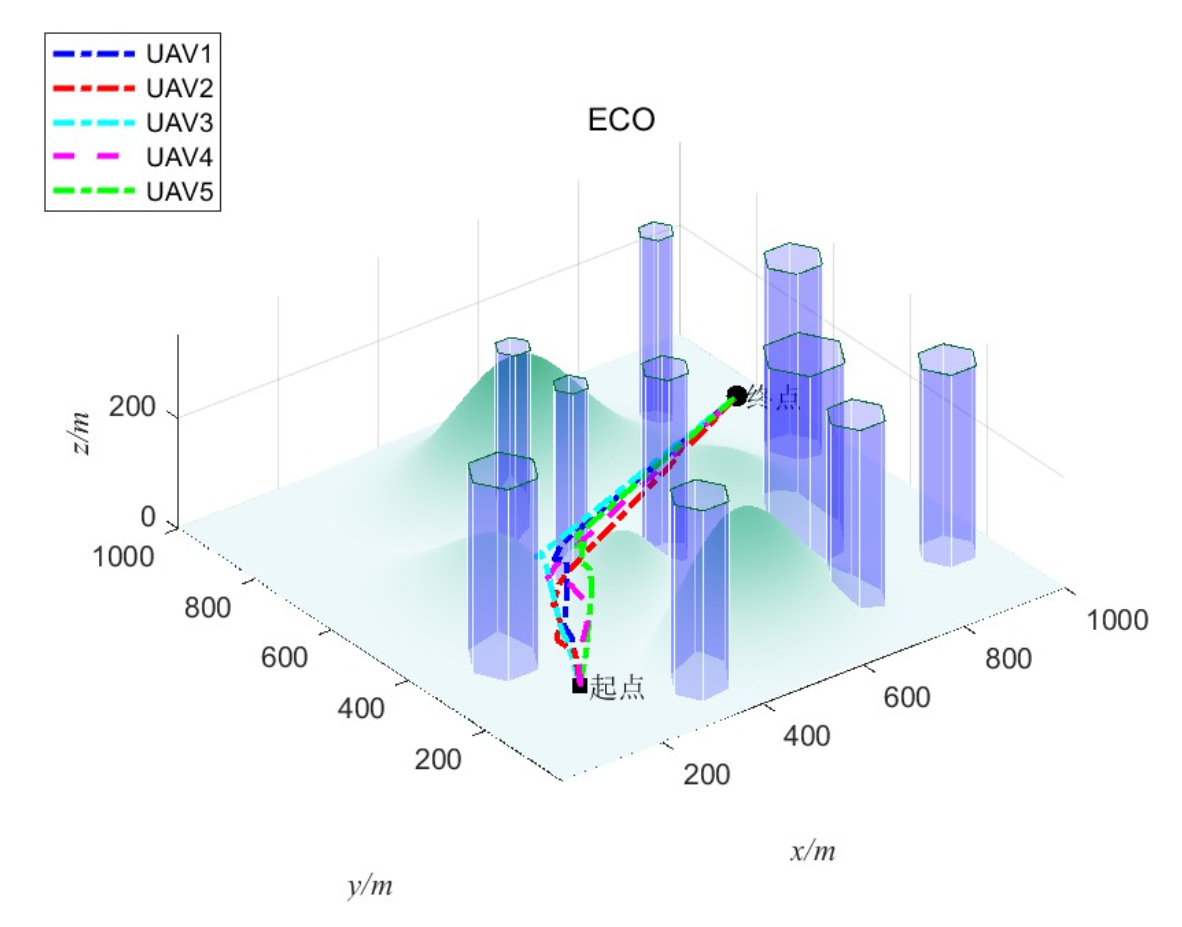
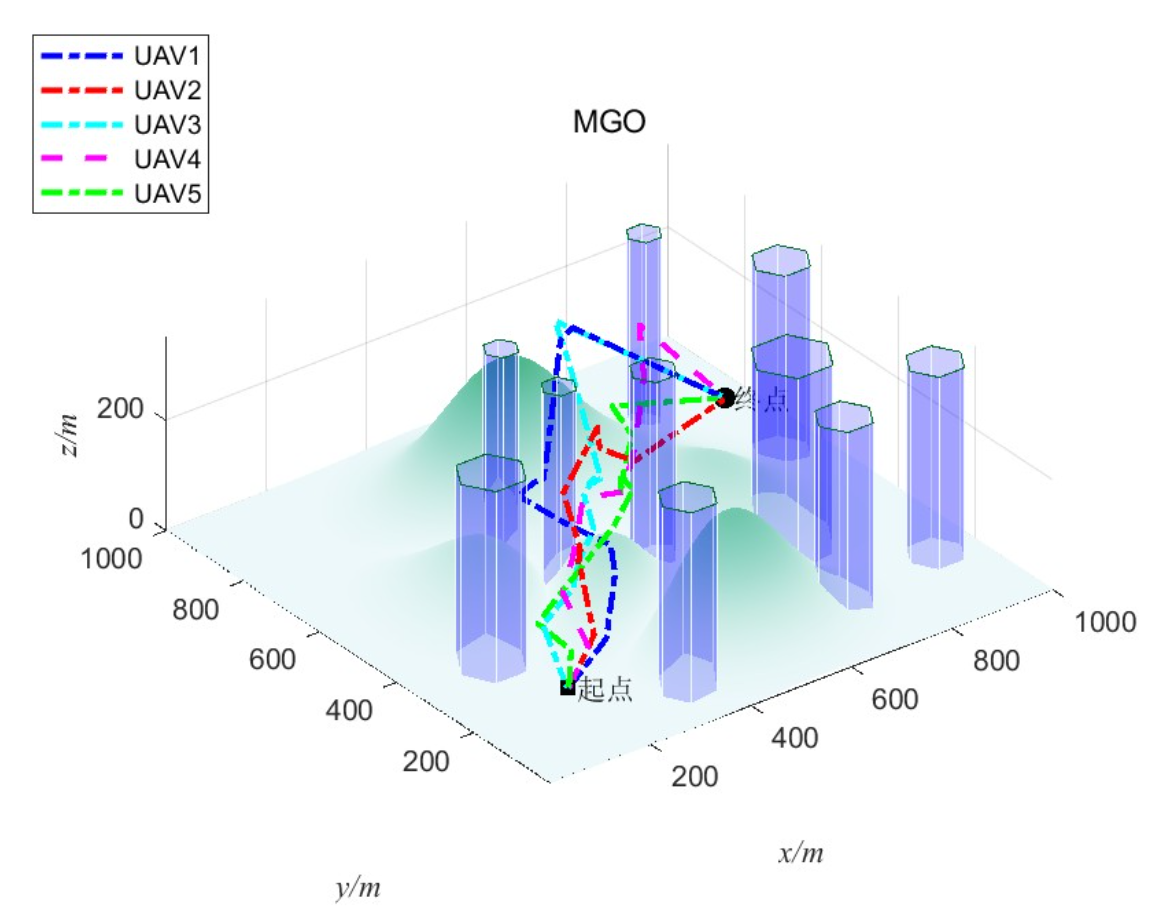
实验结果
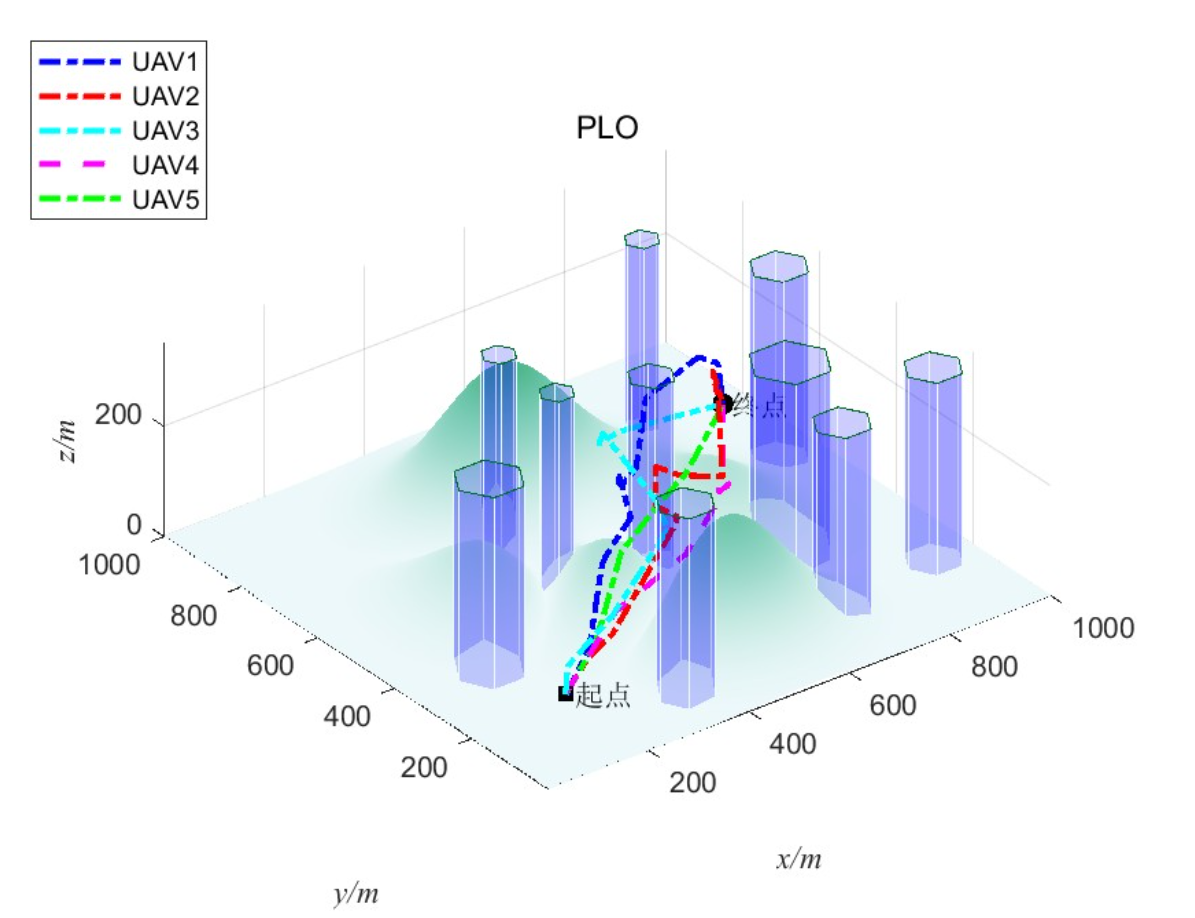
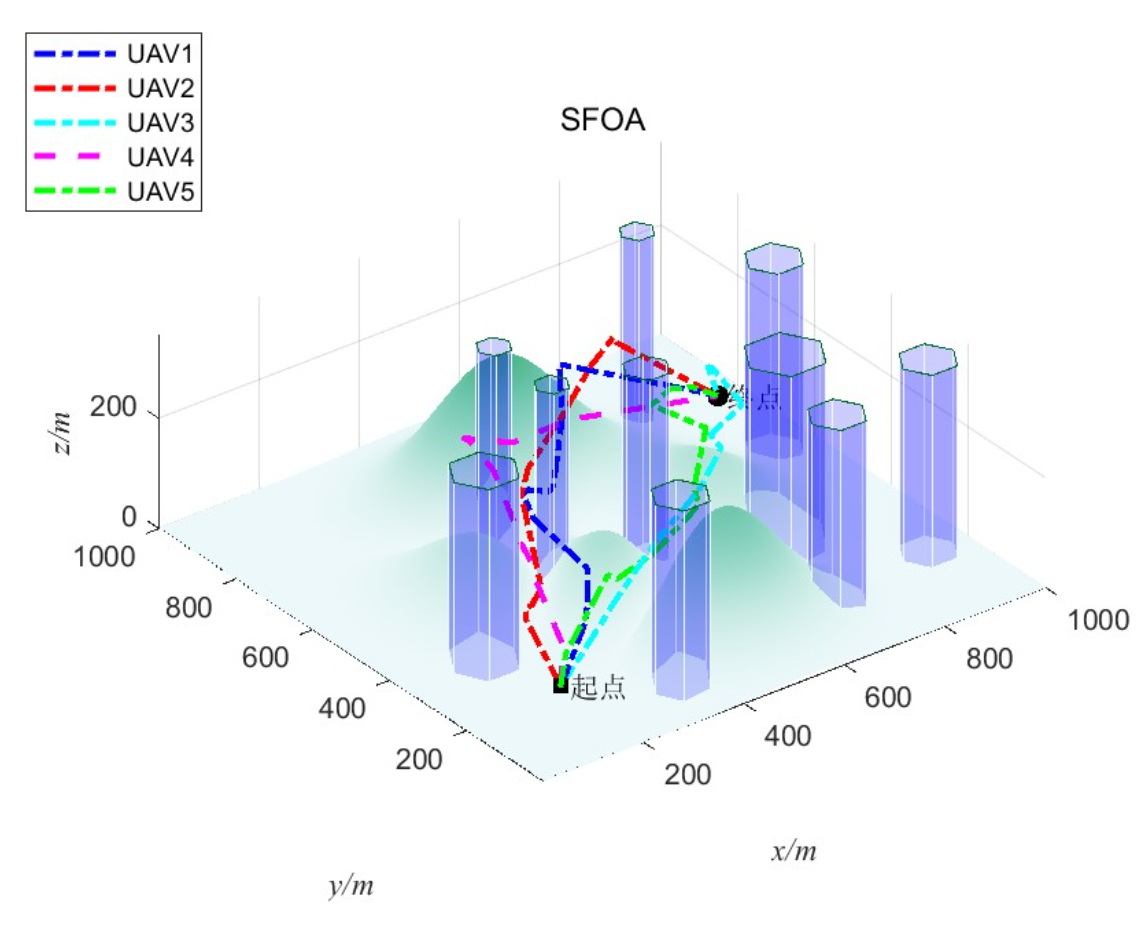
实验对比了五种算法在无人机路径规划中的表现,结果如图所示。各算法在200次迭代内的路径规划总成本如下:
-
SFOA、PLO表现稳定,收敛较快;
-
ECO与AO在初期具有较高的收敛效率;
-
MGO在路径总成本最优方面表现突出。

部分代码
% 初始化参数
num_UAV = 5; % 无人机数量
max_iter = 200; % 最大迭代次数
obstacles = generateObstacles(); % 随机生成障碍物
start_point = [100, 100, 0];
end_point = [900, 900, 200];
% 运行SFOA算法
[SFOA_path, SFOA_cost] = SFOA_PathPlanning(start_point, end_point, obstacles, max_iter);
% 运行ECO算法
[ECO_path, ECO_cost] = ECO_PathPlanning(start_point, end_point, obstacles, max_iter);
% 绘制路径图
figure;
plot3(SFOA_path(:,1), SFOA_path(:,2), SFOA_path(:,3), 'r--', 'DisplayName', 'SFOA');
hold on;
plot3(ECO_path(:,1), ECO_path(:,2), ECO_path(:,3), 'b-', 'DisplayName', 'ECO');
legend;
grid on;
xlabel('x/m');
ylabel('y/m');
zlabel('z/m');
title('无人机路径规划比较');
参考文献
❝
Smith, J., & Johnson, L. (2023). Optimization Techniques for UAV Path Planning. IEEE Transactions on Robotics.
Zhang, Y., & Lee, M. (2022). Multi-UAV Cooperative Path Planning Using Heuristic Algorithms. Journal of Intelligent Systems.
Chen, R., & Wang, K. (2021). Energy-Efficient Path Planning in UAV Networks. Applied Soft Computing.
Liu, Z., & Patel, S. (2020). Obstacle Avoidance in Multi-UAV Systems. Journal of Aerospace Computing, Information, and Communication.
(文章内容仅供参考,具体效果以图片为准)