如何使用GCC手动编译stm32程序

如何不使用任何IDE(集成开发环境)编译stm32程序?
集成开发环境将编辑器、编译器、链接器、调试器等开发工具集成在一个统一的软件中,使得开发人员可以更加简单、高效地完成软件开发过程。如果我们不使用KEIL,IAR等集成开发环境,就需要手动完成对stm32程序的编译,得到一个stm32可以执行的文件。

这个问题看似很闲的蛋疼,其实不然。集成开发环境降低了开发难度,隐藏了开发细节。如果我们能手动实现程序的编译,这将使我们更深入的理解程序编译和stm32启动。
开发步骤分为以下两个步骤:
1、编译环境的搭建
2、编写和编译程序
开发环境:
Windows10
stm32f103rb
1.搭建编译环境
搭建编译环境的目的是,实现编译stm32的程序代码,得到一个stm32可执行文件。搭建编译环境分为以下两个步骤:
1、安装编译器
2、安装make工具
1.1安装编译器
在Windows10系统下适用于STM32的编译器为gcc-arm-none-eabi 。
gcc-arm-none-eabi是GNU项目下的软件,是一个面向ARM架构的芯片的交叉编译器。交叉编译器是一种特殊的编译器,它能够使得开发者可以在自己的主机(如PC)上编写和编译代码,然后将编译后的二进制代码部署到目标嵌入式系统(如ARM架构的微控制器)上运行。
前往ARM的官方网站下载gcc-arm-none-eabi
https://developer.arm.com/downloads/-/gnu-rm
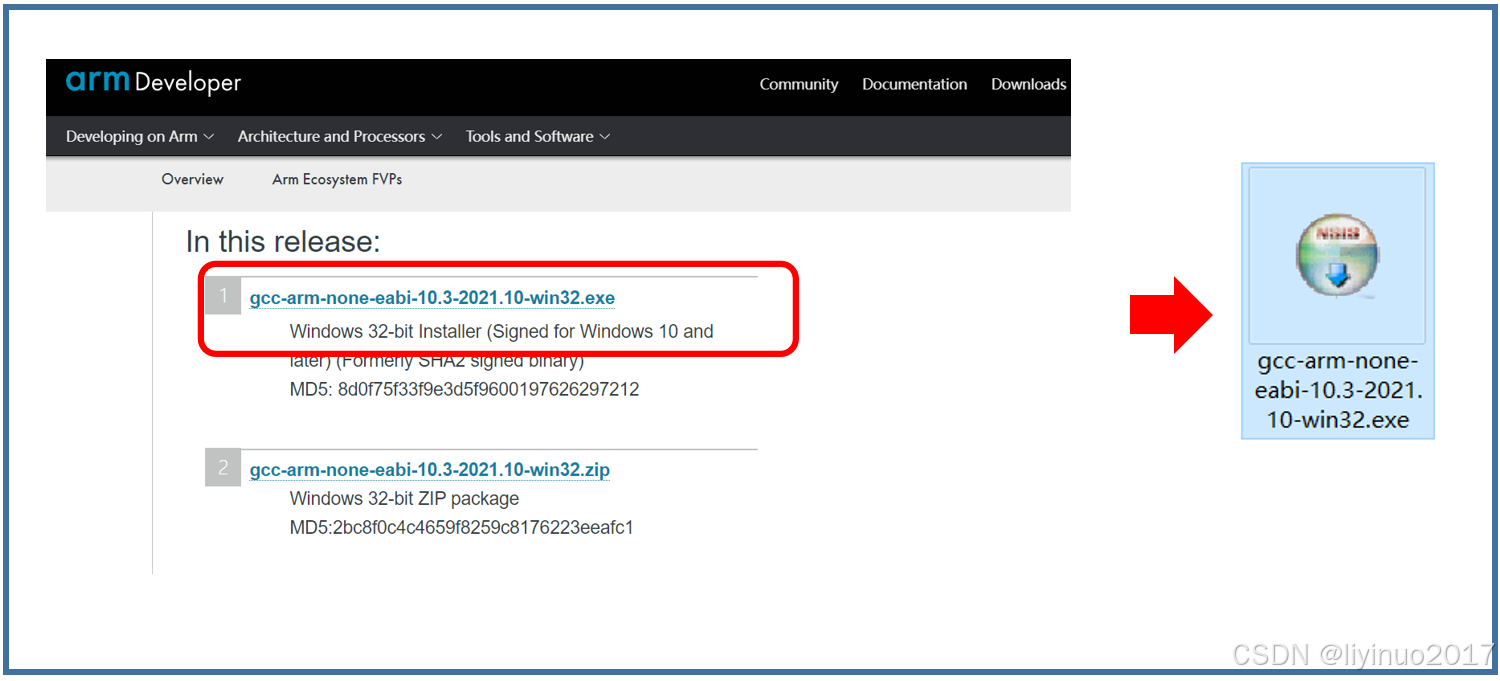
安装gcc-arm-none-eabi
使用默认选项安装,在最后的完成界面,一定要勾选“add path to environment variable”

测试gcc-arm-none-eabi
按下win+r按键输入cmd启动终端,在终端中输入如下指令,查看gcc版本。安装失败会提示指令为无效指令。安装失败有可能是没有勾选“add path to environment variable”
arm-none-eabi-gcc --version

成就:完成编译器安装后,我们可以将C程序编译成stm32f103rb能识别的二进制代码。
1.2安装make工具
安装gcc-arm-none-eabi后我们就可以编译C文件得到stm32可执行文件,那我们是不是开始编译我们的工程了呢?显然不是,此时我们会遇到如下问题:
1、当你的程序只有一个源文件的时候,直接使用gcc命令编译就行。软件工程包含的源文件越来越多采用gcc命令逐个手动去编译,很容易混乱而且工作量大,会让人抓狂。而且各个文件可能还得依赖不同的库,这样命令会变得很长,显然这是不可行的办法。
2、开发一个项目的时候,进行了一个简单的修改,比如就改了一个if条件,修改后都要重新编译一次,假设整个源码的工程里面的源文件的数量几百个或者上千个,完成所有文件的编译是需要大量时间的,编译半天都有可能,就修改了一个小bug而已,花费这么久的时间,明显工作效率会很低。

为了解决上述问题make工具诞生了。make工具可以看成是一个智能的批处理工具,它本身并没有编译和链接的功能,通过调用makefile文件中用户指定的命令来进行编译和链接的。
makefile就是一个脚本文件,简单的说就像一首歌的乐谱,make工具就像指挥家,指挥家根据乐谱指挥整个乐团怎么样演奏,make工具就根据 makefile中的命令进行编译和链接的。
下载make工具
在这里我不直接安装make工具,我们采样迂回的方式安装make工具。下载wingm
https://www.mingw-w64.org/downloads/#winlibscom


安装wingm
解压wingm,假设我们的路径是E:\tools\mingw64\bin (每个人的路径可能不一样)

将E:\tools\mingw64\bin路径(每个人的路径可能不一样)添加到系统环境变量PATH中,这样我们才可以在任意地方执行mingw64\bin中的指令,按照如下步骤将E:\tools\mingw64\bin添加到PATH中。

关键步骤到了:
将E:\tools\mingw64\bin\ming32-make.exe 重命名为 c:\MinGw\bin\make.exe
测试make工具
按下win+r按键输入cmd重新启动终端(一定要重新启动终端,终端不会实时更新环境变量),在终端中输入如下指令,查看make版本。安装失败会提示指令为无效指令。
make -v
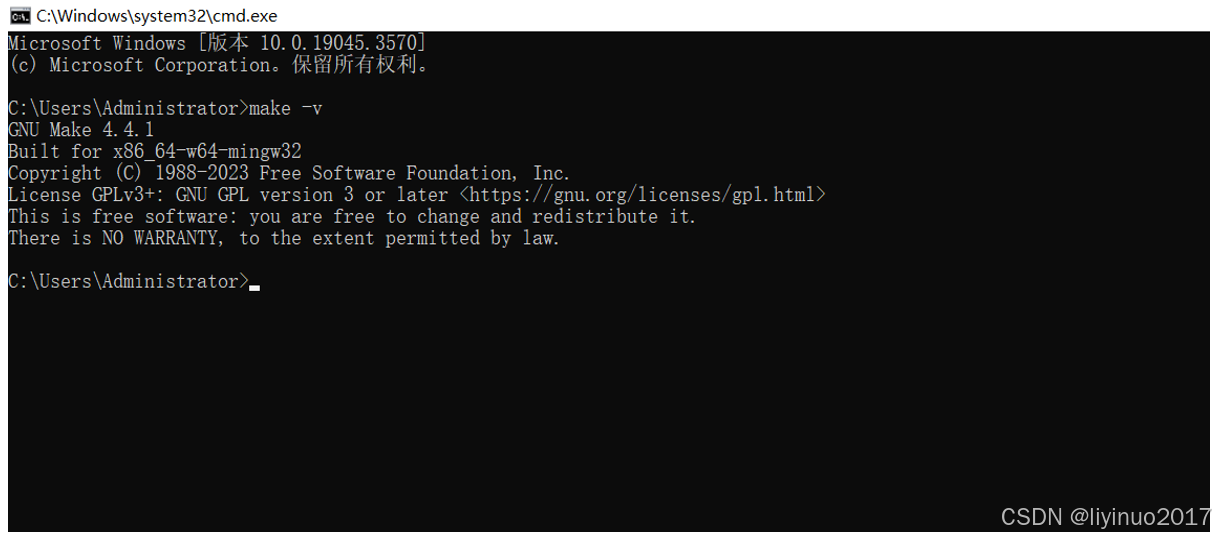

至此我们的编译环境搭建完成,接下来我们就开始编译代码之旅!
2.编写和编译程序
2.1使用gcc-arm-none-eabi编译一个C文件
写一个main函数,保存为main.c文件
int main(void)
{
while (1)
{
// 主循环代码,例如LED闪烁、串口通信等
// ...
}
}
在main.c文件目录下运行cmd ,执行如下指令,我们编译得到一个main.o文件。
arm-none-eabi-gcc -c main.c -o main.o
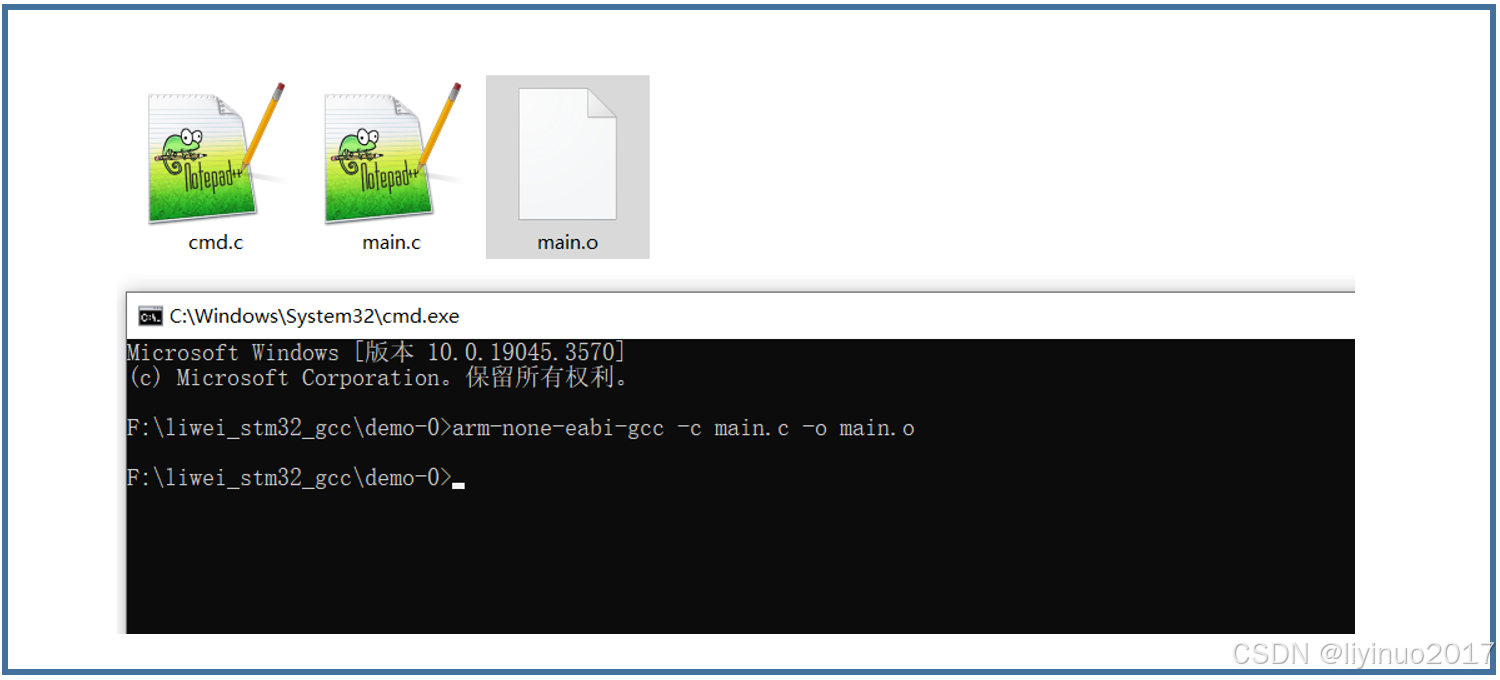
至此我们可以编译得到一个.o文件,这就是我们的第一步。
2.2写一个Makeflie编译C文件
正如前文说的当只有一个C文件时,可以手动使用gcc指令编译,如果有很多C文件时,手动使用gcc指令去完成编译已经变得不可能,此时就需要用到我们的make工具。接下来我们用make工具实现批量编译。
我们建立一个src文件夹,和一个Makefile文件,并在src文件夹中创建main.c和test.c两个C文件。

mian.c内容如下:
void _exit(int status) __attribute__((weak));
void _exit(int status)
{
while (1);
}
int main(void)
{
while (1) {
// 主循环代码,例如LED闪烁
// ...
}
}
test.c内容如下:
void delay(void)
{
int i = 0 ;
for(i = 0 ;i < 1000 ; i++)
{
}
}
Makefile内容如下:
# 定义编译器
CC = arm-none-eabi-gcc
# 目标
TARGET = my_test
# 列出所有源文件
SRCS = $(wildcard src/*.c)
# 将源文件转换为目标文件列表
OBJS = $(SRCS:.c=.o)
# 默认目标
all: $(TARGET)
# 生成文件
$(TARGET): $(OBJS)
$(CC) $(OBJS) -o $(TARGET)
然后我们在Makefile文件所在的路径下运行cmd,并在终端中输入指令make,运行结果如下:

于是成功我们利用make工具实现批量编译C文件。
2.3编写一个启动文件和链接文件
目前我们已经可以利用make工具实现对文件的批量编译,那么是不是可以将编译得到的文件运行到stm32f103rb芯片上呢?
答案是否定的,要让stm32f103rb芯片运行我们编译得到的执行文件,还有以下3个步骤:
1、配置arm-none-eabi-gcc参考,让编译器输出stm32f103rb可执行格式的文件
2、编写一个启动文件,让代码能被正常引导
3、编写一个链接文件,让告诉编译器将生成的代码放置的合适位置
配置arm-none-eabi-gcc
当我们在gcc指令后增加一个参数-mcpu=cortex-m3,此时编译器输出的文件格式将是cortex-m3芯片能执行的格式,而stm32f103rb属于cortex-m3系列。
arm-none-eabi-gcc -c -mcpu=cortex-m3
编写一个启动文件
stm32芯片启动流程如下:
1、用代码段的第1个32位数初始化堆栈指针SP
2、用代码段的第2个32位数初始化程序指针PC(也就是程序跳转到第2个32位数的数值指向的地址)
为了完成正确的启动,我们需要写一个汇编格式的启动文件,汇编代码内容如下:
/**
*********************************************************************************************************
* (c) Copyright 2024-2032
* All Rights Reserved
* @By : liwei
*********************************************************************************************************
**/
.syntax unified
.cpu cortex-m3
.fpu softvfp
.thumb
/******************************************************************************
复位启动函数Reset_Handler 执行跳转到main函数
******************************************************************************/
.section .text.Reset_Handler
.weak Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
bl main
bx lr
.size Reset_Handler, .-Reset_Handler
/******************************************************************************
向量表 第一个值为SP 第二个值为复位地址
******************************************************************************/
.global g_pfnVectors
.section .isr_vector,"a",%progbits
.type g_pfnVectors, %object
.size g_pfnVectors, .-g_pfnVectors
g_pfnVectors:
.word _estack
.word Reset_Handler
由启动函数可知,我们定义了一个g_pfnVectors向量表,向量表中的 第一个值为SP初始化值, 第二个值为复位Reset_Handler函数地址。
在复位函数Reset_Handler中跳转到了mian函数。
编写一个链接文件
是不是增加一个启动文件,就能让stm32f103rb芯片运行我们编译得到的执行文件了呢?
答案是否定的!
问题:代码应该下载到stm32f103rb芯片的什么位置?
在编译过程中有一个重要的环节:链接

链接可以将多个目标代码整合成最终的可执行程序,在链接过程中有个重要的步骤就是给程序指定一个起始位置。因此我们编写一个简单的链接文件:
/* 定义flash 和 ram 区域 */
MEMORY
{
flash (rx) : ORIGIN = 0x08000000, LENGTH = 64K
ram (rwx) : ORIGIN = 0x20000000, LENGTH = 20K
}
ENTRY(Reset_Handler)
_heap_size = 0; /* required amount of heap */
_stack_size = 0; /* required amount of stack */
/* The stack starts at the end of RAM and grows downwards. Full-descending*/
_estack = ORIGIN(ram) + LENGTH(ram);
SECTIONS
{
/* Reset and ISR vectors */
.isr_vector :
{
__isr_vector_start__ = .;
KEEP(*(.isr_vector)) /* without 'KEEP' the garbage collector discards this section */
ASSERT(. != __isr_vector_start__, "The .isr_vector section is empty");
} >flash
/* Text section (code and read-only data) */
.text :
{
. = ALIGN(4);
_stext = .;
*(.text*) /* code */
*(.rodata*) /* read only data */
/*
* NOTE: .glue_7 and .glue_7t sections are not needed because Cortex-M
* only supports Thumb instructions, no ARM/Thumb interworking.
*/
/* Static constructors and destructors */
KEEP(*(.init))
KEEP(*(.fini))
. = ALIGN(4);
_etext = .;
} >flash
/*
* Initialized data section. This section is programmed into FLASH (LMA
* address) and copied to RAM (VMA address) in startup code.
*/
_sidata = .;
.data : AT(_sidata) /* LMA address is _sidata (in FLASH) */
{
. = ALIGN(4);
_sdata = .; /* data section VMA address */
*(.data*)
. = ALIGN(4);
_edata = .;
} >ram
/* Uninitialized data section (zeroed out by startup code) */
.bss :
{
. = ALIGN(4);
_sbss = .;
*(.bss*)
*(COMMON)
. = ALIGN(4);
_ebss = .;
} >ram
/*
* Reserve memory for heap and stack. The linker will issue an error if
* there is not enough memory.
*/
._heap :
{
. = ALIGN(4);
. = . + _heap_size;
. = ALIGN(4);
} >ram
._stack :
{
. = ALIGN(4);
. = . + _stack_size;
. = ALIGN(4);
} >ram
}
/* Nice to have */
__isr_vector_size__ = SIZEOF(.isr_vector);
__text_size__ = SIZEOF(.text);
__data_size__ = SIZEOF(.data);
__bss_size__ = SIZEOF(.bss);
从代码中可以发现,程序定义了flash和ram的起始位置和大小。
flash (rx) : ORIGIN = 0x08000000, LENGTH = 64K
ram (rwx) : ORIGIN = 0x20000000, LENGTH = 20K
程序同时定了一个中断向量段,这个段在flash的开始位置。
/* Reset and ISR vectors */
.isr_vector :
{
__isr_vector_start__ = .;
KEEP(*(.isr_vector)) /* without 'KEEP' the garbage collector discards this section */
ASSERT(. != __isr_vector_start__, "The .isr_vector section is empty");
} >flash
程序还定义了.text 、.data、.bss 、._heap 、._stack段。
编写Makefile文件
编写一个makefil文件:
# toolchain
CC = arm-none-eabi-gcc
CP = arm-none-eabi-objcopy
AS = arm-none-eabi-gcc -x assembler-with-cpp
# all the files will be generated with this name
PROJECT_NAME=stm32f10x_project
# user specific
SRC += ./user/main.c
# startup
ASM_SRC += ./user/startup_stm32f10x_md.s
OBJECTS = $(ASM_SRC:.s=.o) $(SRC:.c=.o)
# Define optimisation level here
MC_FLAGS = -mcpu=cortex-m3
AS_FLAGS = $(MC_FLAGS) -g -mthumb
CP_FLAGS = $(MC_FLAGS) -g -mthumb -Wall -fverbose-asm
LD_FLAGS = $(MC_FLAGS) -g -mthumb -Xlinker --gc-sections -T stm32_flash.ld
# makefile rules
all: $(OBJECTS) $(PROJECT_NAME).elf $(PROJECT_NAME).hex $(PROJECT_NAME).bin
arm-none-eabi-size $(PROJECT_NAME).elf
%.o: %.c
$(CC) -c $(CP_FLAGS) -I . $(INC_DIR) $< -o $@
%.o: %.s
$(AS) -c $(AS_FLAGS) $< -o $@
%.elf: $(OBJECTS)
$(CC) $(OBJECTS) $(LD_FLAGS) -o $@
%.hex: %.elf
$(CP) -O ihex $< $@
%.bin: %.elf
$(CP) -O binary -S $< $@
clean:
del /Q $(PROJECT_NAME).elf $(PROJECT_NAME).hex $(PROJECT_NAME).bin
编写main文件
程序需要在main函数中实现对stm32f103rb芯片的控制,为了直观的显示结果,程序通过一个gpio控制一个led灯,main函数如下:
/**
*********************************************************************************************************
* (c) Copyright 2024-2032
* All Rights Reserved
* @By : liwei
*********************************************************************************************************
**/
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
// 定义STM32F103的寄存器基地址
#define STM32_RCC_BASE 0x40021000
#define STM32_GPIOB_BASE 0x40010C00
// 定义寄存器偏移
#define RCC_APB2ENR_OFFSET 0x18
#define GPIOB_CRL_OFFSET 0x00
#define GPIOB_CRH_OFFSET 0x04
#define GPIOB_ODR_OFFSET 0x0C
// 定义寄存器地址
#define RCC_APB2ENR_REG (*(volatile uint32_t *)(STM32_RCC_BASE + RCC_APB2ENR_OFFSET))
#define GPIOB_CRL_REG (*(volatile uint32_t *)(STM32_GPIOB_BASE + GPIOB_CRH_OFFSET))
#define GPIOB_ODR_REG (*(volatile uint16_t *)(STM32_GPIOB_BASE + GPIOB_ODR_OFFSET))
// 定义位掩码
#define RCC_APB2ENR_IOPBEN ((uint32_t)0x00000008)
#define GPIO_MODE_OUT_50MHZ ((uint32_t)0x0002)
#define GPIO_CNF_PP ((uint32_t)0x0000)
#define GPIO_PIN15 ((uint16_t)0x8000)
/***********************************************************************************************************
* @描述 : 延时函数
***********************************************************************************************************/
void delay(volatile uint32_t count)
{
while (count--)
{
// 空循环
}
}
/***********************************************************************************************************
* @描述 : 配置GPIOB引脚
***********************************************************************************************************/
void GPIOB_ConfigPin15AsOutput(void)
{
// 使能GPIOB时钟
RCC_APB2ENR_REG |= RCC_APB2ENR_IOPBEN;
// 配置GPIOB引脚15的模式和配置
uint32_t temp = GPIOB_CRL_REG;
temp &= ~(0x0F000000); // 清除
temp |= (GPIO_MODE_OUT_50MHZ << 28); // 设置MODE15为通用推挽输出模式,最大速度50MHz
temp &= ~(0x00F00000); // 清除CNF15位(第20-23位)
temp |= (GPIO_CNF_PP << 30); // 设置CNF15为推挽输出配置
GPIOB_CRL_REG = temp;
}
/***********************************************************************************************************
* @描述 : main
***********************************************************************************************************/
int main(void)
{
// 配置GPIOB引脚
GPIOB_ConfigPin15AsOutput();
// 主循环
while (1)
{
// 切换GPIOB引脚15的状态
GPIOB_ODR_REG = GPIO_PIN15;
delay(1000000); // 延时
// 切换GPIOB引脚15的状态
GPIOB_ODR_REG &= ~GPIO_PIN15;
delay(1000000); // 延时
}
}
程序通过直接控制寄存器的方式控制GPIOB引脚15的状态,从而实现对led状态的控制。
在Makefile文件路径下运行cmd,在终端中执行make指令,我们将得到.hex的可执行文件,将执行文件下载到stm32f103rb中可以发现被控制的led灯闪烁。

至此,我们已经基本完成目标,使用gcc工具编译得到了一个stm32f103rb可执行文件,大功告成!
2.4完善启动文件
虽然我们实现了目标,但是实际上目前完成的工程只是一个简单的,不完善的工程,接下来我们继续完善启动文件,深入理解芯片启动的完整过程。
启动代码如下:
/**
*********************************************************************************************************
* (c) Copyright 2024-2032
* All Rights Reserved
* @By : liwei
*********************************************************************************************************
**/
.syntax unified
.cpu cortex-m3
.fpu softvfp
.thumb
.global g_pfnVectors
.global Default_Handler
/* start address for the initialization values of the . defined in linker script */
.word _sidata
.word _sdata
.word _edata
.word _sbss
.word _ebss
.equ BootRAM, 0xF108F85F
/******************************************************************************
复位启动函数Reset_Handler
******************************************************************************/
.section .text.Reset_Handler
.weak Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
/* 将初始化数据段器从FLASH复制到SRAM*/
movs r1, #0
b LoopCopyDataInit
CopyDataInit:
ldr r3, =_sidata
ldr r3, [r3, r1]
str r3, [r0, r1]
adds r1, r1, #4
LoopCopyDataInit:
ldr r0, =_sdata
ldr r3, =_edata
adds r2, r0, r1
cmp r2, r3
bcc CopyDataInit
ldr r2, =_sbss
b LoopFillZerobss
/* 初始化 bss */
FillZerobss:
movs r3, #0
str r3, [r2], #4
LoopFillZerobss:
ldr r3, = _ebss
cmp r2, r3
bcc FillZerobss
/* 跳转到main函数*/
bl main
bx lr
.size Reset_Handler, .-Reset_Handler
/******************************************************************************
默认中断代替函数
******************************************************************************/
.section .text.Default_Handler,"ax",%progbits
Default_Handler:
Infinite_Loop:
b Infinite_Loop
.size Default_Handler, .-Default_Handler
/******************************************************************************
向量表
******************************************************************************/
.section .isr_vector,"a",%progbits
.type g_pfnVectors, %object
.size g_pfnVectors, .-g_pfnVectors
g_pfnVectors:
.word _estack
.word Reset_Handler
.word NMI_Handler
.word HardFault_Handler
.word MemManage_Handler
.word BusFault_Handler
.word UsageFault_Handler
.word 0
.word 0
.word 0
.word 0
.word SVC_Handler
.word DebugMon_Handler
.word 0
.word PendSV_Handler
.word SysTick_Handler
.word WWDG_IRQHandler
.word PVD_IRQHandler
.word TAMPER_IRQHandler
.word RTC_IRQHandler
.word FLASH_IRQHandler
.word RCC_IRQHandler
.word EXTI0_IRQHandler
.word EXTI1_IRQHandler
.word EXTI2_IRQHandler
.word EXTI3_IRQHandler
.word EXTI4_IRQHandler
.word DMA1_Channel1_IRQHandler
.word DMA1_Channel2_IRQHandler
.word DMA1_Channel3_IRQHandler
.word DMA1_Channel4_IRQHandler
.word DMA1_Channel5_IRQHandler
.word DMA1_Channel6_IRQHandler
.word DMA1_Channel7_IRQHandler
.word ADC1_2_IRQHandler
.word USB_HP_CAN1_TX_IRQHandler
.word USB_LP_CAN1_RX0_IRQHandler
.word CAN1_RX1_IRQHandler
.word CAN1_SCE_IRQHandler
.word EXTI9_5_IRQHandler
.word TIM1_BRK_IRQHandler
.word TIM1_UP_IRQHandler
.word TIM1_TRG_COM_IRQHandler
.word TIM1_CC_IRQHandler
.word TIM2_IRQHandler
.word TIM3_IRQHandler
.word TIM4_IRQHandler
.word I2C1_EV_IRQHandler
.word I2C1_ER_IRQHandler
.word I2C2_EV_IRQHandler
.word I2C2_ER_IRQHandler
.word SPI1_IRQHandler
.word SPI2_IRQHandler
.word USART1_IRQHandler
.word USART2_IRQHandler
.word USART3_IRQHandler
.word EXTI15_10_IRQHandler
.word RTCAlarm_IRQHandler
.word USBWakeUp_IRQHandler
.word 0
.word 0
.word 0
.word 0
.word 0
.word 0
.word 0
.word BootRAM
/*******************************************************************************
*
* Provide weak aliases for each Exception handler to the Default_Handler.
* As they are weak aliases, any function with the same name will override
* this definition.
*
*******************************************************************************/
.weak NMI_Handler
.thumb_set NMI_Handler,Default_Handler
.weak HardFault_Handler
.thumb_set HardFault_Handler,Default_Handler
.weak MemManage_Handler
.thumb_set MemManage_Handler,Default_Handler
.weak BusFault_Handler
.thumb_set BusFault_Handler,Default_Handler
.weak UsageFault_Handler
.thumb_set UsageFault_Handler,Default_Handler
.weak SVC_Handler
.thumb_set SVC_Handler,Default_Handler
.weak DebugMon_Handler
.thumb_set DebugMon_Handler,Default_Handler
.weak PendSV_Handler
.thumb_set PendSV_Handler,Default_Handler
.weak SysTick_Handler
.thumb_set SysTick_Handler,Default_Handler
.weak WWDG_IRQHandler
.thumb_set WWDG_IRQHandler,Default_Handler
.weak PVD_IRQHandler
.thumb_set PVD_IRQHandler,Default_Handler
.weak TAMPER_IRQHandler
.thumb_set TAMPER_IRQHandler,Default_Handler
.weak RTC_IRQHandler
.thumb_set RTC_IRQHandler,Default_Handler
.weak FLASH_IRQHandler
.thumb_set FLASH_IRQHandler,Default_Handler
.weak RCC_IRQHandler
.thumb_set RCC_IRQHandler,Default_Handler
.weak EXTI0_IRQHandler
.thumb_set EXTI0_IRQHandler,Default_Handler
.weak EXTI1_IRQHandler
.thumb_set EXTI1_IRQHandler,Default_Handler
.weak EXTI2_IRQHandler
.thumb_set EXTI2_IRQHandler,Default_Handler
.weak EXTI3_IRQHandler
.thumb_set EXTI3_IRQHandler,Default_Handler
.weak EXTI4_IRQHandler
.thumb_set EXTI4_IRQHandler,Default_Handler
.weak DMA1_Channel1_IRQHandler
.thumb_set DMA1_Channel1_IRQHandler,Default_Handler
.weak DMA1_Channel2_IRQHandler
.thumb_set DMA1_Channel2_IRQHandler,Default_Handler
.weak DMA1_Channel3_IRQHandler
.thumb_set DMA1_Channel3_IRQHandler,Default_Handler
.weak DMA1_Channel4_IRQHandler
.thumb_set DMA1_Channel4_IRQHandler,Default_Handler
.weak DMA1_Channel5_IRQHandler
.thumb_set DMA1_Channel5_IRQHandler,Default_Handler
.weak DMA1_Channel6_IRQHandler
.thumb_set DMA1_Channel6_IRQHandler,Default_Handler
.weak DMA1_Channel7_IRQHandler
.thumb_set DMA1_Channel7_IRQHandler,Default_Handler
.weak ADC1_2_IRQHandler
.thumb_set ADC1_2_IRQHandler,Default_Handler
.weak USB_HP_CAN1_TX_IRQHandler
.thumb_set USB_HP_CAN1_TX_IRQHandler,Default_Handler
.weak USB_LP_CAN1_RX0_IRQHandler
.thumb_set USB_LP_CAN1_RX0_IRQHandler,Default_Handler
.weak CAN1_RX1_IRQHandler
.thumb_set CAN1_RX1_IRQHandler,Default_Handler
.weak CAN1_SCE_IRQHandler
.thumb_set CAN1_SCE_IRQHandler,Default_Handler
.weak EXTI9_5_IRQHandler
.thumb_set EXTI9_5_IRQHandler,Default_Handler
.weak TIM1_BRK_IRQHandler
.thumb_set TIM1_BRK_IRQHandler,Default_Handler
.weak TIM1_UP_IRQHandler
.thumb_set TIM1_UP_IRQHandler,Default_Handler
.weak TIM1_TRG_COM_IRQHandler
.thumb_set TIM1_TRG_COM_IRQHandler,Default_Handler
.weak TIM1_CC_IRQHandler
.thumb_set TIM1_CC_IRQHandler,Default_Handler
.weak TIM2_IRQHandler
.thumb_set TIM2_IRQHandler,Default_Handler
.weak TIM3_IRQHandler
.thumb_set TIM3_IRQHandler,Default_Handler
.weak TIM4_IRQHandler
.thumb_set TIM4_IRQHandler,Default_Handler
.weak I2C1_EV_IRQHandler
.thumb_set I2C1_EV_IRQHandler,Default_Handler
.weak I2C1_ER_IRQHandler
.thumb_set I2C1_ER_IRQHandler,Default_Handler
.weak I2C2_EV_IRQHandler
.thumb_set I2C2_EV_IRQHandler,Default_Handler
.weak I2C2_ER_IRQHandler
.thumb_set I2C2_ER_IRQHandler,Default_Handler
.weak SPI1_IRQHandler
.thumb_set SPI1_IRQHandler,Default_Handler
.weak SPI2_IRQHandler
.thumb_set SPI2_IRQHandler,Default_Handler
.weak USART1_IRQHandler
.thumb_set USART1_IRQHandler,Default_Handler
.weak USART2_IRQHandler
.thumb_set USART2_IRQHandler,Default_Handler
.weak USART3_IRQHandler
.thumb_set USART3_IRQHandler,Default_Handler
.weak EXTI15_10_IRQHandler
.thumb_set EXTI15_10_IRQHandler,Default_Handler
.weak RTCAlarm_IRQHandler
.thumb_set RTCAlarm_IRQHandler,Default_Handler
.weak USBWakeUp_IRQHandler
.thumb_set USBWakeUp_IRQHandler,Default_Handler
首先程序定义了一个完整了向量表,它不仅包含SP初始化值、PC初始化值、同时还包括stm32f103rb芯片所有的中断向量。
g_pfnVectors:
.word _estack
.word Reset_Handler
.word NMI_Handler
.word HardFault_Handler
.word MemManage_Handler
.word BusFault_Handler
.word UsageFault_Handler
.word 0
.word 0
.word 0
.word 0
.word SVC_Handler
.word DebugMon_Handler
.
.
.
在复位函数Reset_Handler中,完成了对data 段和 bss段的初始化,最后跳转到mian函数。
/******************************************************************************
复位启动函数Reset_Handler
******************************************************************************/
.section .text.Reset_Handler
.weak Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
/* 将初始化数据段器从FLASH复制到SRAM*/
movs r1, #0
b LoopCopyDataInit
CopyDataInit:
ldr r3, =_sidata
ldr r3, [r3, r1]
str r3, [r0, r1]
adds r1, r1, #4
LoopCopyDataInit:
ldr r0, =_sdata
ldr r3, =_edata
adds r2, r0, r1
cmp r2, r3
bcc CopyDataInit
ldr r2, =_sbss
b LoopFillZerobss
/* 初始化 bss */
FillZerobss:
movs r3, #0
str r3, [r2], #4
LoopFillZerobss:
ldr r3, = _ebss
cmp r2, r3
bcc FillZerobss
/* 跳转到main函数*/
bl main
bx lr
.size Reset_Handler, .-Reset_Handler
问题:程序中的初始化静态变量的初始值是怎么来的?
如全局变量:int value = 1314;
value是保存在ram中的变量,芯片重启后ram中的值是随机的,程序是怎么让ram中的值为1314的?
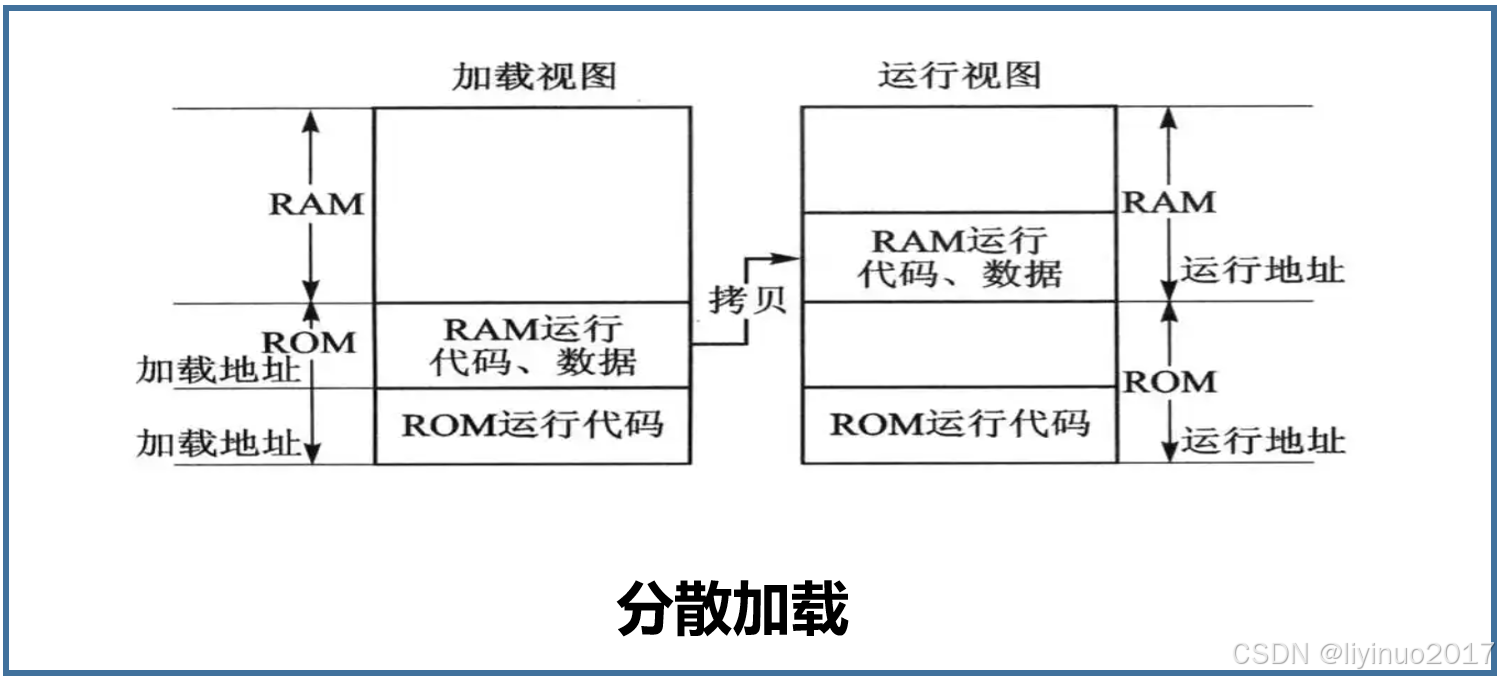
利用分散加载技术,程序将存放在ROM中的data 段数据复制到RAM指定的位置,从而实现了data 段的数据初始化。Reset_Handler中的如下代码完成了数据加载功能:
/* 将初始化数据段器从FLASH复制到SRAM*/
movs r1, #0
b LoopCopyDataInit
CopyDataInit:
ldr r3, =_sidata
ldr r3, [r3, r1]
str r3, [r0, r1]
adds r1, r1, #4
LoopCopyDataInit:
ldr r0, =_sdata
ldr r3, =_edata
adds r2, r0, r1
cmp r2, r3
bcc CopyDataInit
ldr r2, =_sbss
b LoopFillZerobss
在Makefile文件路径下运行cmd,在终端中执行make指令,我们将得到.hex的可执行文件,将执行文件下载到stm32f103rb中可以发现被控制的led灯闪烁。

2.5完善工程
我们还剩下最后一个问题:
使用st官方的库进行编程(不使直接用寄存器地址编程)
此时我们要添加st的官方库文件,修改Makefile文件,修改mian.c文件。
mian.c内容如下:
/**
*********************************************************************************************************
* (c) Copyright 2024-2032
* All Rights Reserved
* @By : liwei
*********************************************************************************************************
**/
#include "stm32f10x.h"
#include "stm32f10x_conf.h"
/***********************************************************************************************************
* @描述 : 延时函数
***********************************************************************************************************/
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
/***********************************************************************************************************
* @描述 : 设置使能
***********************************************************************************************************/
void RCC_Configuration(void)
{
/* GPIOA, GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
}
/***********************************************************************************************************
* @描述 : 配置GPIO
***********************************************************************************************************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/***********************************************************************************************************
* @描述 : main函数
***********************************************************************************************************/
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
//LED闪烁
while (1)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_15);
Delay(300000);
GPIO_SetBits(GPIOB, GPIO_Pin_15);
Delay(300000);
}
}
Makefile内容如下:
# toolchain
TOOLCHAIN = arm-none-eabi-
CC = $(TOOLCHAIN)gcc
CP = $(TOOLCHAIN)objcopy
AS = $(TOOLCHAIN)gcc -x assembler-with-cpp
# all the files will be generated with this name (main.elf, main.bin, main.hex, etc)
PROJECT_NAME=stm32f10x_project
# define include dir
INCLUDE_DIRS =
# define stm32f10x lib dir
STM32F10x_LIB_DIR = ./stm32f10x_lib
# define user dir
USER_DIR = ./user
# link file
LINK_SCRIPT = ./stm32_flash.ld
# user specific
SRC =
ASM_SRC =
SRC += $(USER_DIR)/main.c
# user include
INCLUDE_DIRS = $(USER_DIR)
# source director
STM32F1_STD_LIB = $(STM32F10x_LIB_DIR)/STM32F10x_StdPeriph_Driver
STM32F1_CORE_DIR = $(STM32F10x_LIB_DIR)/CMSIS/CM3/CoreSupport
STM32F1_DEVICE_DIR = $(STM32F10x_LIB_DIR)/CMSIS/CM3/DeviceSupport/ST/STM32F10x
STM32F1_SRC_DIR = $(STM32F1_STD_LIB)/src
STM32F1_INC_DIR = $(STM32F1_STD_LIB)/inc
# startup
ASM_SRC += $(STM32F1_DEVICE_DIR)/startup/gcc_ride7/startup_stm32f10x_md.s
# CMSIS
SRC += $(STM32F1_DEVICE_DIR)/system_stm32f10x.c
SRC += $(STM32F1_CORE_DIR)/core_cm3.c
# use libraries, please add or remove when you use or remove it.
SRC += $(STM32F1_SRC_DIR)/stm32f10x_rcc.c
SRC += $(STM32F1_SRC_DIR)/stm32f10x_gpio.c
SRC += $(STM32F1_SRC_DIR)/stm32f10x_exti.c
SRC += $(STM32F1_SRC_DIR)/stm32f10x_usart.c
SRC += $(STM32F1_SRC_DIR)/misc.c
# include directories
INCLUDE_DIRS += $(STM32F1_CORE_DIR)
INCLUDE_DIRS += $(STM32F1_DEVICE_DIR)
INCLUDE_DIRS += $(STM32F1_INC_DIR)
INCLUDE_DIRS += $(STM32F1_STD_LIB)
INC_DIR = $(patsubst %, -I%, $(INCLUDE_DIRS))
OBJECTS = $(ASM_SRC:.s=.o) $(SRC:.c=.o)
# Define optimisation level here
MC_FLAGS = -mcpu=cortex-m3
AS_FLAGS = $(MC_FLAGS) -g -gdwarf-2 -mthumb -Wa,-amhls=$(<:.s=.lst)
CP_FLAGS = $(MC_FLAGS) -Os -g -gdwarf-2 -mthumb -fomit-frame-pointer -Wall -fverbose-asm -Wa,-ahlms=$(<:.c=.lst)
LD_FLAGS = $(MC_FLAGS) -g -gdwarf-2 -mthumb -nostartfiles -Xlinker --gc-sections -T$(LINK_SCRIPT) -Wl,-Map=$(PROJECT_NAME).map,--cref,--no-warn-mismatch
# makefile rules
all: $(OBJECTS) $(PROJECT_NAME).elf $(PROJECT_NAME).hex $(PROJECT_NAME).bin
$(TOOLCHAIN)size $(PROJECT_NAME).elf
%.o: %.c
$(CC) -c $(CP_FLAGS) -I . $(INC_DIR) $< -o $@
%.o: %.s
$(AS) -c $(AS_FLAGS) $< -o $@
%.elf: $(OBJECTS)
$(CC) $(OBJECTS) $(LD_FLAGS) -o $@
%.hex: %.elf
$(CP) -O ihex $< $@
%.bin: %.elf
$(CP) -O binary -S $< $@
clean:
del /Q $(PROJECT_NAME).elf $(PROJECT_NAME).hex $(PROJECT_NAME).bin
在Makefile文件路径下运行cmd,在终端中执行make指令,我们将得到.hex的可执行文件,将执行文件下载到stm32f103rb中可以发现被控制的led灯闪烁。

3.总结
为了实现如何不使用任何IDE集成软件编译得到stm32程序的执行文件,安装了GCC和make工具。
为了编译得到stm32f103rb执行文件,需要完成以下操作:
1、编写启动文件
2、编写链接文件
3、编写Makeflie文件
4、编写C语言源代码
希望获取源码的朋友可以在评论区留言
希望获取源码的朋友可以在评论区留言
希望获取源码的朋友可以在评论区留言
创作不易希望朋友们点赞,转发,评论,关注!
您的点赞,转发,评论,关注将是我持续更新的动力!
CSDN:https://blog.csdn.net/li_man_man_man
今日头条:https://www.toutiao.com/article/7149576260891443724