ros2笔记-6.5 使用ros2_control驱动机器人
ros2_control 是使用ros2进行机器人控制的框架。简化硬件的集成。
6.5.1 ros2_control安装
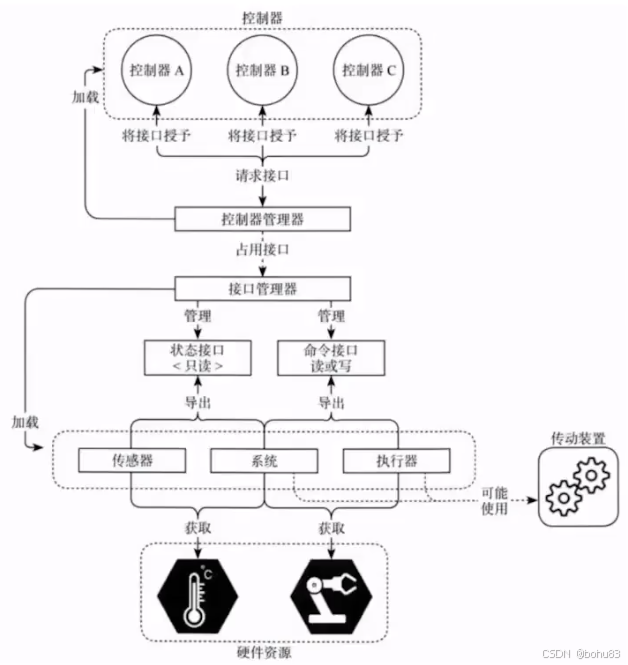
为什么要用ros2_contrl.书上、视频上小鱼老师介绍的比较清楚,这里放个control框架图。
安装:
sudo apt install ros-$ROS_DISTRO-ros2-control
sudo apt install ros-$ROS_DISTRO-ros2-controllers
6.5.2 使用gazebo 介入ros2_control
安装依赖插件:
sudo apt install ros-$ROS_DISTRO-gazebo-ros2-control
在目录src/fishbot_description/urdf/fishbot/下新建文件fishbot.ros2_control.xacro,代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="fishbot_ros2_control">
<ros2_control name="FishBotGazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="left_wheel_joint">
<!--控制接口-->
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<!--状态接口 -->
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters>
</plugin>
</gazebo>
</xacro:macro>
</robot>定义了一个fishbot_ros2_control 宏,标签ros2_control 描述硬件资源。
下面的关节joint,定义了左右两个轮子,有控制接口跟状态接口。
下面的gazebo标签定义了用来解析ros2_control的标签的插件。里面的参数需要config目录新建文件:fishbot_ros2_controller.yaml
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true至此,声明了fishbot_ros2_control的宏,我们还需要在fish_robot.urdf.xacro中引用并使用。
注意,这里跟之前的gazebo两轮差速控制有冲突,所以,暂时注释掉。
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="fishbot">
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/base.urdf.xacro" />
<!-- 传感器组件 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/imu.urdf.xacro" />
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/laser.urdf.xacro" />
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/camera.urdf.xacro" />
<!-- 执行器组件 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/wheel.urdf.xacro" />
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/caster.urdf.xacro" />
<!--gazebo插件-->
<!-- <xacro:include filename="$(find fishbot_description)/urdf/fishbot/plugins/gazebo_control_plugin.xacro" /> -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/plugins/gazebo_sensor_plugin.xacro" />
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/fishbot.ros2_control.xacro" />
<xacro:base_xacro length="0.12" radius="0.1" />
<!-- 传感器 -->
<xacro:imu_xacro xyz="0 0 0.02" />
<xacro:laser_xacro xyz="0 0 0.10" />
<xacro:camera_xacro xyz="0.10 0 0.075" />
<!-- 执行器主动轮+从动轮 -->
<xacro:wheel_xacro wheel_name="left_wheel" xyz="0 0.10 -0.06" />
<xacro:wheel_xacro wheel_name="right_wheel" xyz="0 -0.10 -0.06" />
<xacro:caster_xacro caster_name="front_caster" xyz="0.08 0.0 -0.076" />
<xacro:caster_xacro caster_name="back_caster" xyz="-0.08 0.0 -0.076" />
<!-- <xacro:gazebo_control_plugin /> -->
<xacro:gazebo_sensor_plugin />
<xacro:fishbot_ros2_control />
</robot>重新构建并启动后。可以查询控制器管理器服务
bohu@bohu-TM1701:~$ ros2 service list|grep controller
/controller_manager/configure_controller
/controller_manager/describe_parameters
/controller_manager/get_parameter_types
/controller_manager/get_parameters
/controller_manager/list_controller_types
/controller_manager/list_controllers
/controller_manager/list_hardware_components
/controller_manager/list_hardware_interfaces
/controller_manager/list_parameters
/controller_manager/load_controller
/controller_manager/reload_controller_libraries
/controller_manager/set_hardware_component_state
/controller_manager/set_parameters
/controller_manager/set_parameters_atomically
/controller_manager/switch_controller
/controller_manager/unload_controller也可以查询控制器硬件接口;这个前面标签配置的一样
bohu@bohu-TM1701:~$ ros2 control list_hardware_interfaces
command interfaces
left_wheel_joint/effort [available] [unclaimed]
left_wheel_joint/velocity [available] [unclaimed]
right_wheel_joint/effort [available] [unclaimed]
right_wheel_joint/velocity [available] [unclaimed]
state interfaces
left_wheel_joint/effort
left_wheel_joint/position
left_wheel_joint/velocity
right_wheel_joint/effort
right_wheel_joint/position
right_wheel_joint/velocity
6.5.3 使用关节状态发布控制器
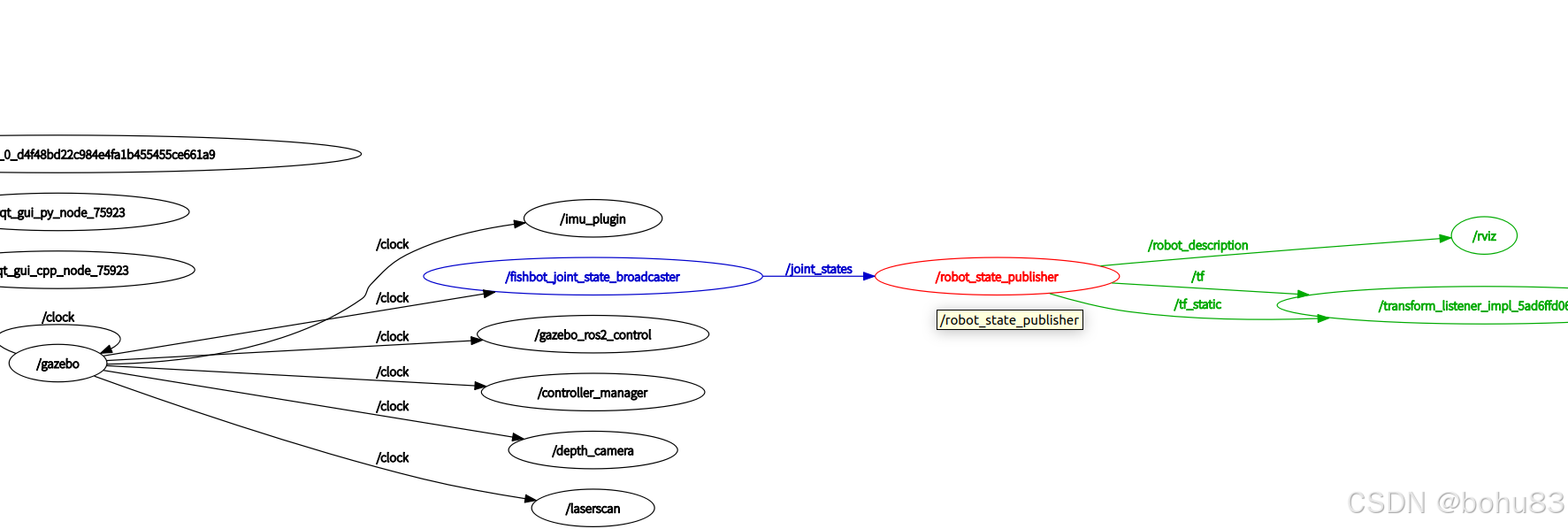
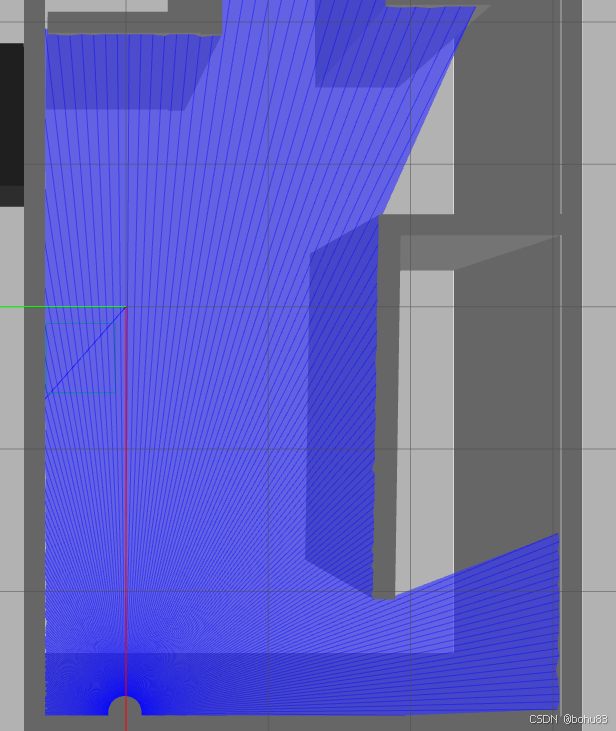
在刚做完的6.5.2,此时进入rviz会发现轮子异常,缺少了轮子到base_footprint的TF转换。跟我之前报错一样,这是因为刚注销了gazebo插件的导致的。我们可以使用ros_control的关节状态控制器,发布/joint_states 话题,然后有robot_sate_publiser转换为TF数据发布。
在fishbot_ros2_controller.yaml 添加
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster构建后启动。并使用命令行加载激活fishbot_joint_state_broadcaster控制器。
bohu@bohu-TM1701:~$ ros2 control load_controller fishbot_joint_state_broadcaster --set-state active
Successfully loaded controller fishbot_joint_state_broadcaster into state active
此时,rviz能显示正常,也能通过命令行查看joint_states话题
bohu@bohu-TM1701:~$ ros2 topic echo /joint_states --once
header:
stamp:
sec: 3278
nanosec: 486000000
frame_id: ''
name:
- left_wheel_joint
- right_wheel_joint
position:
- -0.00011715882368168451
- 0.00010725719480220164
velocity:
- -3.353251441562582e-06
- -5.942979131065872e-07
effort:
- 0.0
- 0.0
---
rqt 查看
使用命令不方便,可以加入到启动脚本里
import launch
import launch.event_handlers
import launch.launch_description_sources
import launch_ros
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# 获取功能包默认路径
urdf_tutorial_path = get_package_share_directory('fishbot_description')
default_model_path = urdf_tutorial_path + '/urdf/fishbot/fish_robot.urdf.xacro'
default_world_path = urdf_tutorial_path + '/world/custom_room.world'
# 为 Launch 声明参数
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name='model', default_value=str(default_model_path),
description='加载模型文件的绝对路径')
# 获取文件内容生成新的参数
robot_description = launch_ros.parameter_descriptions.ParameterValue(
launch.substitutions.Command(
['xacro ', launch.substitutions.LaunchConfiguration('model')]),
value_type=str)
# 状态发布节点
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# 通过 IncludeLaunchDescription 包含另外一个 launch 文件
launch_gazebo = launch.actions.IncludeLaunchDescription(
launch.launch_description_sources.PythonLaunchDescriptionSource([get_package_share_directory(
'gazebo_ros'), '/launch', '/gazebo.launch.py']),
# 传递参数
launch_arguments=[('world', default_world_path),('verbose','true')]
)
#请求gazebo 加载机器人
action_spawn_entity = launch_ros.actions.Node(
package= 'gazebo_ros',
executable='spawn_entity.py',
arguments=['-topic', '/robot_description','-entity', 'fishbot']
)
# 加载并激活 fishbot_joint_state_broadcaster 控制器
load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active',
'fishbot_joint_state_broadcaster'],
output='screen'
)
return launch.LaunchDescription([
action_declare_arg_mode_path,
robot_state_publisher_node,
launch_gazebo,
action_spawn_entity,
#事件动作,当加载机器人结束后执行
launch.actions.RegisterEventHandler(
event_handler= launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[load_joint_state_controller],
)
)
])查看已经加载的控制器和状态
bohu@bohu-TM1701:~$ ros2 control list_controllers
fishbot_joint_state_broadcaster joint_state_broadcaster/JointStateBroadcaster active
bohu@bohu-TM1701:~$ ros2 control set_controller_state fishbot_joint_state_broadcaster inactive
[INFO] [1736821412.447120508] [_ros2cli_80444]: waiting for service /controller_manager/list_controllers to become available...
Successfully deactivated fishbot_joint_state_broadcaster
bohu@bohu-TM1701:~$ ros2 control list_controllers
fishbot_joint_state_broadcaster joint_state_broadcaster/JointStateBroadcaster inactive
bohu@bohu-TM1701:~$ ros2 control unload_controller fishbot_joint_state_broadcaster
Successfully unloaded controller fishbot_joint_state_broadcaster
bohu@bohu-TM1701:~$ ros2 control list_controllers
No controllers are currently loaded!
有不同的命令来设置状态及卸载控制器。
6.5.4 使用力控制器控制轮子
在fishbot_ros2_controller.yaml 添加
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
fishbot_effort_controller:
type: effort_controllers/JointGroupEffortController
fishbot_effort_controller:
ros__parameters:
joints:
- left_wheel_joint
- right_wheel_joint
command_interfaces:
- effort
state_interfaces:
- position
- velocity
- effortlaunch脚本
import launch
import launch.event_handlers
import launch.launch_description_sources
import launch_ros
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# 获取功能包默认路径
urdf_tutorial_path = get_package_share_directory('fishbot_description')
default_model_path = urdf_tutorial_path + '/urdf/fishbot/fish_robot.urdf.xacro'
default_world_path = urdf_tutorial_path + '/world/custom_room.world'
# 为 Launch 声明参数
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name='model', default_value=str(default_model_path),
description='加载模型文件的绝对路径')
# 获取文件内容生成新的参数
robot_description = launch_ros.parameter_descriptions.ParameterValue(
launch.substitutions.Command(
['xacro ', launch.substitutions.LaunchConfiguration('model')]),
value_type=str)
# 状态发布节点
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# 通过 IncludeLaunchDescription 包含另外一个 launch 文件
launch_gazebo = launch.actions.IncludeLaunchDescription(
launch.launch_description_sources.PythonLaunchDescriptionSource([get_package_share_directory(
'gazebo_ros'), '/launch', '/gazebo.launch.py']),
# 传递参数
launch_arguments=[('world', default_world_path),('verbose','true')]
)
#请求gazebo 加载机器人
action_spawn_entity = launch_ros.actions.Node(
package= 'gazebo_ros',
executable='spawn_entity.py',
arguments=['-topic', '/robot_description','-entity', 'fishbot']
)
# 加载并激活 fishbot_joint_state_broadcaster 控制器
load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active',
'fishbot_joint_state_broadcaster'],
output='screen'
)
# 加载并激活 fishbot_effort_controller 控制器
load_fishbot_effort_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_effort_controller'],
output='screen')
return launch.LaunchDescription([
action_declare_arg_mode_path,
robot_state_publisher_node,
launch_gazebo,
action_spawn_entity,
#事件动作,当加载机器人结束后执行
launch.actions.RegisterEventHandler(
event_handler= launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[load_joint_state_controller],
)
),
launch.actions.RegisterEventHandler(
event_handler= launch.event_handlers.OnProcessExit(
target_action=load_joint_state_controller,
on_exit=[load_fishbot_effort_controller],
)
)
])重新构建,运行,可以查看 力控的话题
bohu@bohu-TM1701:~$ ros2 topic list -t |grep effort
/fishbot_effort_controller/commands [std_msgs/msg/Float64MultiArray]
/fishbot_effort_controller/transition_event [lifecycle_msgs/msg/TransitionEvent]
使用命令控制轮子扭矩
bohu@bohu-TM1701:~$ ros2 topic pub /fishbot_effort_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.0001, 0.0001]}"
publisher: beginning loop
publishing #1: std_msgs.msg.Float64MultiArray(layout=std_msgs.msg.MultiArrayLayout(dim=[], data_offset=0), data=[0.0001, 0.0001])
publishing #2: std_msgs.msg.Float64MultiArray(layout=std_msgs.msg.MultiArrayLayout(dim=[], data_offset=0), data=[0.0001, 0.0001])
此时,在gazebo中机器人会缓缓移动
6.5.5 使用两轮差速控制器控制机器人
在fishbot_ros2_controller.yaml 添加
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
fishbot_effort_controller:
type: effort_controllers/JointGroupEffortController
fishbot_diff_drive_controller:
type: diff_drive_controller/DiffDriveController
fishbot_effort_controller:
ros__parameters:
joints:
- left_wheel_joint
- right_wheel_joint
command_interfaces:
- effort
state_interfaces:
- position
- velocity
- effort
fishbot_diff_drive_controller:
ros__parameters:
left_wheel_names: ["left_wheel_joint"]
right_wheel_names: ["right_wheel_joint"]
wheel_separation: 0.20
#wheels_per_side: 1 # actually 2, but both are controlled by 1 signal
wheel_radius: 0.032
wheel_separation_multiplier: 1.0
left_wheel_radius_multiplier: 1.0
right_wheel_radius_multiplier: 1.0
publish_rate: 50.0
odom_frame_id: odom
base_frame_id: base_footprint
pose_covariance_diagonal : [0.001, 0.001, 0.0, 0.0, 0.0, 0.01]
twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01]
open_loop: true
enable_odom_tf: true
cmd_vel_timeout: 0.5
#publish_limited_velocity: true
use_stamped_vel: false
#velocity_rolling_window_size: 10参数比较多,参见书上表格6-3
修改启动launch脚本,为了防止冲突,注释掉力控制器
import launch
import launch.event_handlers
import launch.launch_description_sources
import launch_ros
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# 获取功能包默认路径
urdf_tutorial_path = get_package_share_directory('fishbot_description')
default_model_path = urdf_tutorial_path + '/urdf/fishbot/fish_robot.urdf.xacro'
default_world_path = urdf_tutorial_path + '/world/custom_room.world'
# 为 Launch 声明参数
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name='model', default_value=str(default_model_path),
description='加载模型文件的绝对路径')
# 获取文件内容生成新的参数
robot_description = launch_ros.parameter_descriptions.ParameterValue(
launch.substitutions.Command(
['xacro ', launch.substitutions.LaunchConfiguration('model')]),
value_type=str)
# 状态发布节点
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# 通过 IncludeLaunchDescription 包含另外一个 launch 文件
launch_gazebo = launch.actions.IncludeLaunchDescription(
launch.launch_description_sources.PythonLaunchDescriptionSource([get_package_share_directory(
'gazebo_ros'), '/launch', '/gazebo.launch.py']),
# 传递参数
launch_arguments=[('world', default_world_path),('verbose','true')]
)
#请求gazebo 加载机器人
action_spawn_entity = launch_ros.actions.Node(
package= 'gazebo_ros',
executable='spawn_entity.py',
arguments=['-topic', '/robot_description','-entity', 'fishbot']
)
# 加载并激活 fishbot_joint_state_broadcaster 控制器
load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active',
'fishbot_joint_state_broadcaster'],
output='screen'
)
# 加载并激活 fishbot_effort_controller 控制器
# load_fishbot_effort_controller = launch.actions.ExecuteProcess(
# cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_effort_controller'],
# output='screen')
load_diff_drive_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_diff_drive_controller'],
output='screen')
return launch.LaunchDescription([
action_declare_arg_mode_path,
robot_state_publisher_node,
launch_gazebo,
action_spawn_entity,
#事件动作,当加载机器人结束后执行
launch.actions.RegisterEventHandler(
event_handler= launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[load_joint_state_controller],
)
),
launch.actions.RegisterEventHandler(
event_handler= launch.event_handlers.OnProcessExit(
target_action=load_joint_state_controller,
on_exit=[load_diff_drive_controller],
)
)
])重新构建,运行;
打开终端, ros2 run teleop_twist_keyboard teleop_twist_keyboard
使用键盘控制机器人运动。