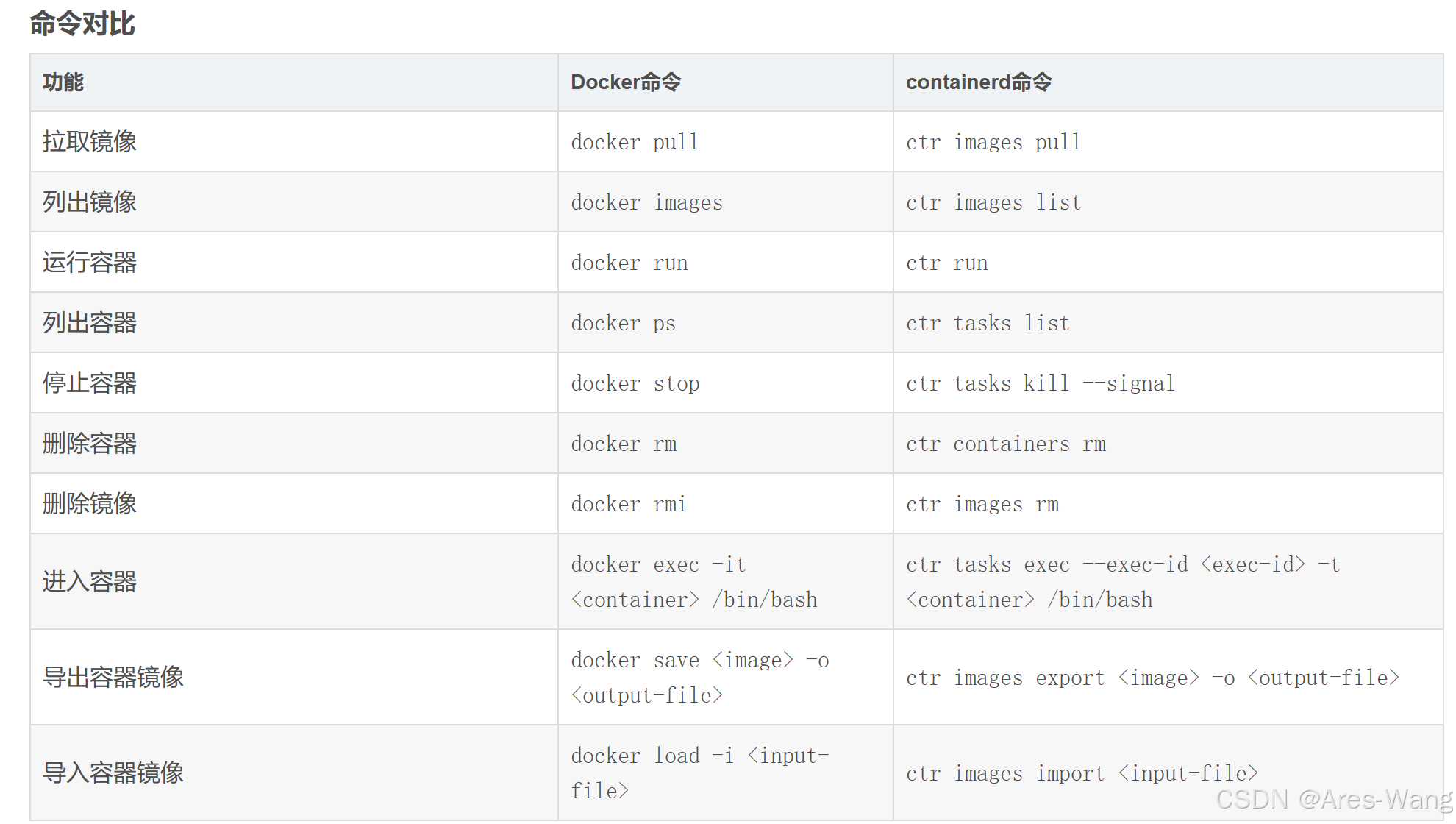
linux》》docker 、containerd 保存镜像、打包tar、加载tar镜像
Linux》》docker:
默认情况下,Docker镜像保存在/var/lib/docker/目录下。
当您使用docker pull命令从Docker Hub或私有镜像仓库中拉取镜像时,Docker会自动将镜像文件保存在/var/lib/docker/image/目录下。
每个镜像都由一个或多个层组成,这些层在文件系统中以SHA256哈希值命名。
容器运行时,Docker会在/var/lib/docker/overlay2/目录下创建一个UUID命名的目录,用于存放该容器和它的元数据。



docker 导出镜像
# docker save
# 使用save参数进行打包,格式如:docker save -o tar文件名称 镜像REPOSITORY:TAG

导入镜像
# docker load -i tar包的镜像文件

containerd 导入镜像、导出
# 导入镜像 ctr images import 镜像名称
ctr images import nginxi-zen.tar
# 导出镜像
ctr images export --all-platforms x.tar docker.io/library/nginx:latest