ArduPilot飞控之DIY-F450计划
ArduPilot飞控之DIY-F450计划
- 1. 历史
- 2. 源由
- 3. 计划
- 3.1 硬件
- 3.2 软件
- 4. 动手
- 4.1 接线
- 4.1.1 ELRS nano接收机
- 4.1.2 BN880 GPS模块
- 4.1.3 Radio Telemetry
- 4.2 配置
- 4.2.1 选择四轴机型
- 4.2.2 电源参数调整
- 4.2.3 校准加速度计
- 4.2.4 校准磁力计
- 4.2.5 遥控器校准
- 4.2.6 电机设置
- 4.2.7 电调校准
- 4.2.8 飞行模式
- 4.2.9 Failsafe设置
- 4.2.10 检查硬件情况
- 4.2.11 额外电源监测设置
- 5. 总结
1. 历史
去年这个时候(2022年5月),DIY第一台航模,详见:四轴飞控DIY简明步骤介绍。
初衷还是比较简单的,大致整理如下:
- 从多方面了解航模
结构,电子,软件,空气动力学,视频通讯链路,远程控制链路等
- 上手组装一台高性价比的试飞体验
DIY且能更换开源固件,以便体验控制系统差异带来的好处
- 简单且容易上手
希望不要太受打击,要能比较好的上手体验
基于上面的各种考虑,最后挑了个F450的机架,选择了BetaFlight飞控系统。同时经历了下面各种“坑”。
【1】四轴飞控DIY简明步骤介绍
【2】四轴飞控DIY调试起飞简明步骤
【3】四轴FPV无人机手动操作简明介绍
【4】四轴飞控DIY集成FPV功能
【5】TX12 + ExpressLRS 915MHz RC控制链路配置及问题汇总
【6】关于穿越机FPV视频果冻效应的讨论
【7】BetaFlight & BeeRotorF3 四轴飞行器配置F450
【8】穿越机用途和机架尺寸
【9】四轴飞控DIY Mark4 - 减震
【10】四轴飞控DIY Mark4 - RTH/GPS Rescure
【11】四轴飞控DIY Mark4 - 整理&参数优化
【12】四轴异常炸机分析讨论集锦
【13】四轴FPV手动训练进阶步骤
【14】【杭州】户外航模试飞地踩点
2. 源由
作为新手玩航模入门,对上面这些基础概念有了一定了解,大体上有了对四轴航模飞行,有了一手体验。
BetaFlight是一个着重飞行体验的系统,因此全程基本上手不离遥控器(虽然也有自稳模式,但是离手,总感觉飞机就要坠毁)。
因此,想使用开源系统体验一把大疆无人机的控制感受(这里不是指视频,主要指控制,比如:任务模式)。
鉴于KakuteF7硬件内部有1MB的Flash存储空间。当前ArduPilot支持该硬件,也就有了本文关于ArduPilot飞控之DIY-F450计划,有兴趣的朋友可以跟着我一起来看看这个过程。
3. 计划
关于ArduPilot飞控之DIY-F450计划大体上分几个步骤来展开:
- 硬件
- 软件
- 接线
- 配置
- 遥控试飞
- 地面站试飞
注:试飞这段内容我们将后面结合实际情况再行介绍,本文着重1 ~ 4步。
3.1 硬件
- 飞控:Kakute F7 AIO V1.5
- 机架:F450
- 动力:翱云2212电机(正反一对)x 2 + ESC电调(20A) x 4 //这个电机网站链接已经废了,具体规格可以参考:四轴飞控DIY简明步骤介绍
- 桨叶:正反自锁桨叶(一对) x 2
- 遥控:TX12
- ELRS:发射机 + 接收机
- GPS:BN880 (含磁力计)
- 电传:权盛电子 Radio Telemetry V5 433MHz/57600bps 100mW
- 电池:3S 2200mAh 25C
- 杜邦线若干 + SH1.25 6pin 连接线 x 2
- 小米pad4 x 1 (安装android版本Mission Planner)
- 笔记本电脑 x 1 (安装Windows桌面版本Mission Planner)
3.2 软件
- Mission Planner v1.3.80
- Ardupilot 4.3.5 @Kakute F7 AIO
- ELRS v3.2
注:这里都是开源软件,开源就是真理!!!
4. 动手
4.1 接线
基本DIY-F450接线与之前类似,请参考:四轴飞控DIY简明步骤介绍。
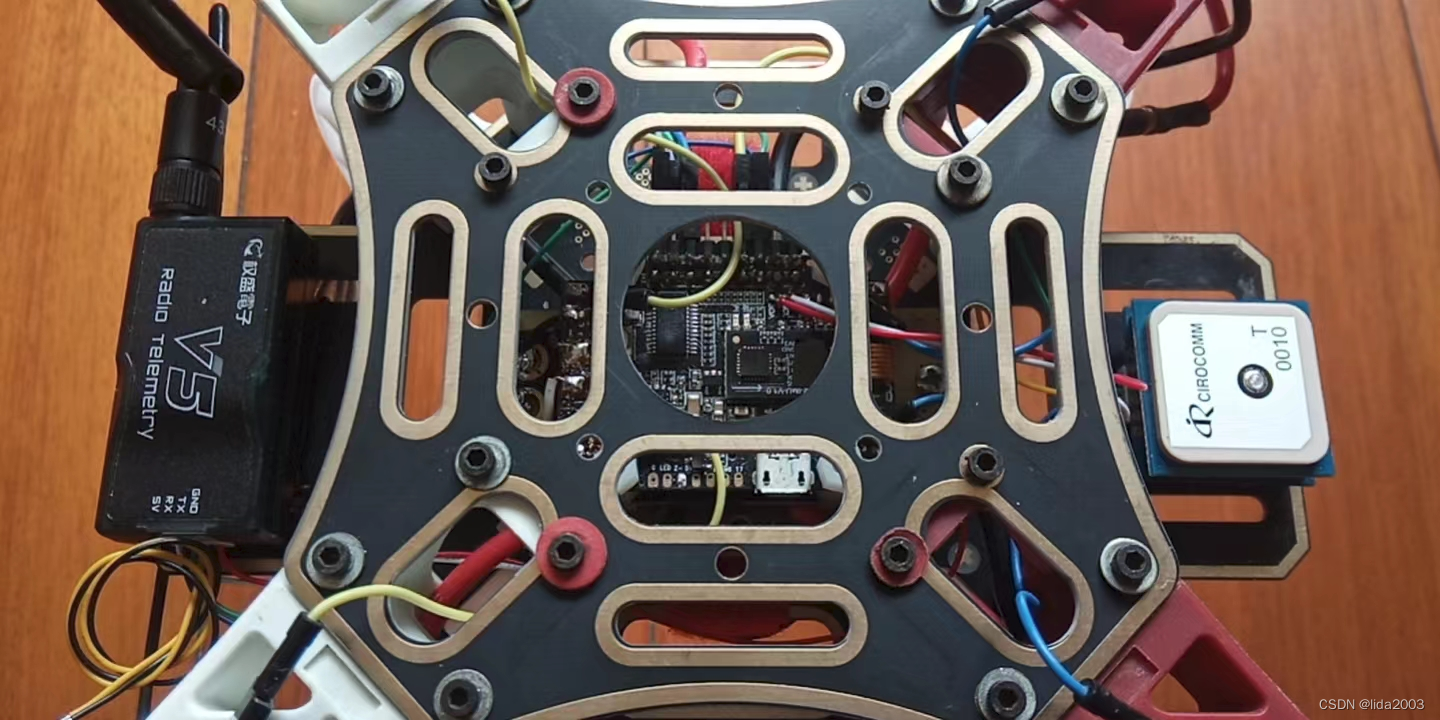
注1:每块板子Ardupilot官网都有介绍,请查阅:Holybro Kakute F7 and KAKUTE F7 AIO。
注2:Kakute F7 AIO板子 5V供电最大支持2A,一般来说是够用了。因为本次需要用到GPS/ELRS/Telemetry,考虑以下几个问题:1)接线;2)供电;3)当前现状,F450使用了PBD板;本次将GPS/Telemetry的供电直接从PDB板子引出。
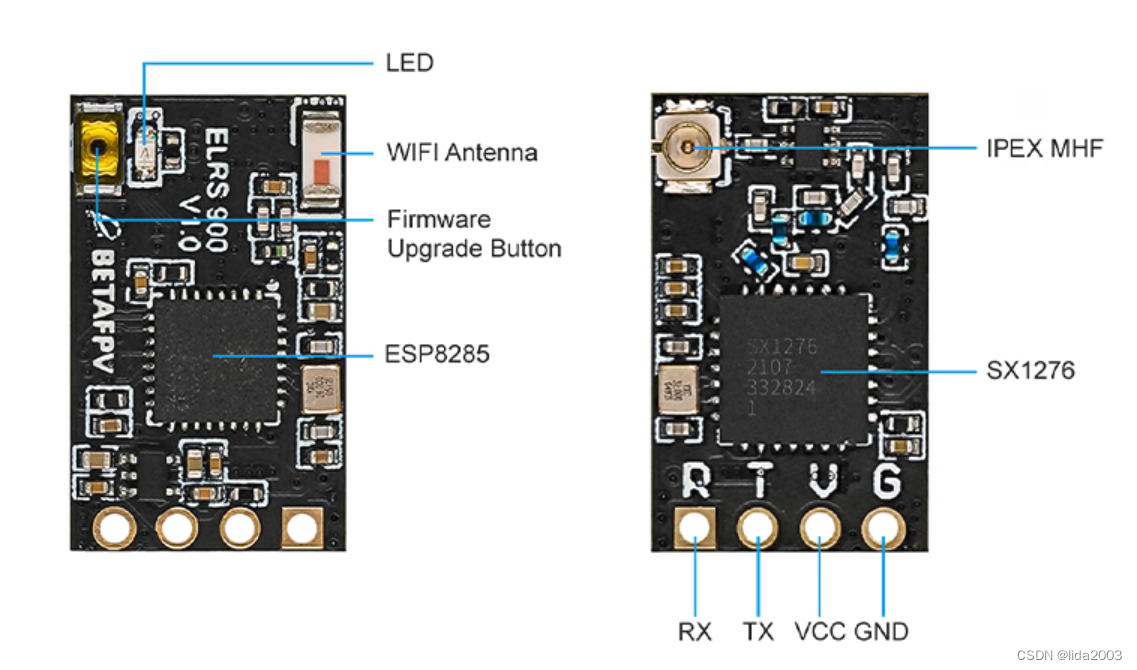
4.1.1 ELRS nano接收机
VCC:5V供电
RX:接飞控Tx
TX:接飞控Rx
GND:要靠近飞控
注:笔者就用了PDB板子供电,导致Rx/Tx信号电平不太对,无法通信。如果GND是直接使用飞控板子上的地,通常没问题。
注:如果要使用Kakute F7 AIO板子上的Serial6,请注意配置BRD_ALT_CONFIG = 1。
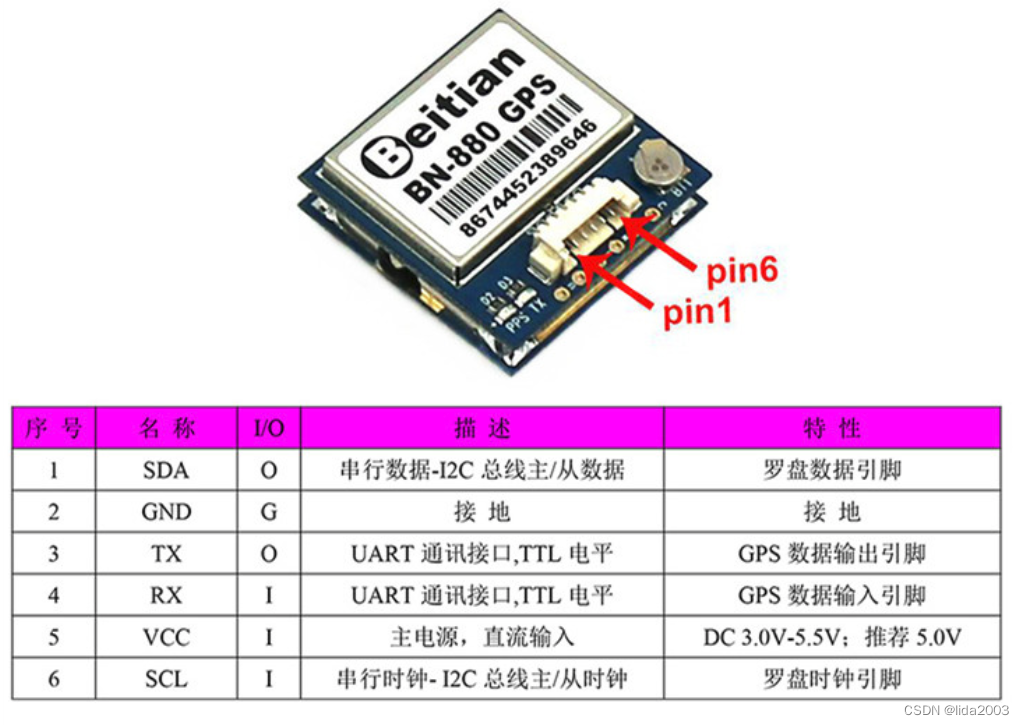
4.1.2 BN880 GPS模块
4.1.3 Radio Telemetry
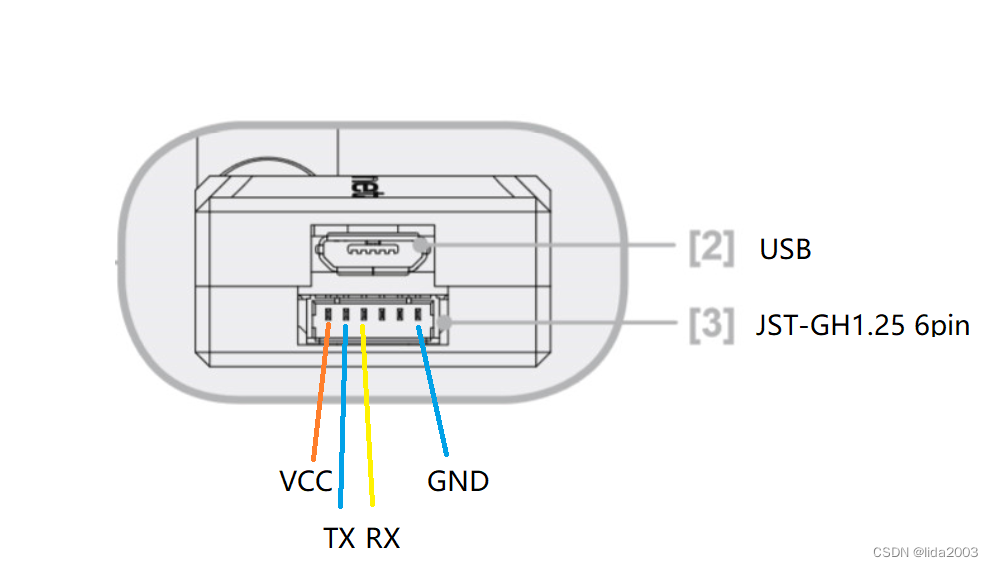
这个权盛电子 3DR Radio Telemetry V5 433MHz/57600bps 100mW接线都是给PX4飞控用的,所以接线头都是做好的,但是为了给笔者的KakuteF7用,那就需要焊接。
焊接就需要知道6pin引脚的定义,但是问题规格里面没有这个JST-GH1.25 6pin引脚定义。
Specifications:
Item Name: For 3DR Radio Telemetry Module
Band: 433MHz 915MHz
Receiver sensitivity: -117 dBm
Air data rates: up to 250kbps
Transmit power: up to 20dBm (100mW)
Antenna connectors: RP-SMA connector
Output Power: 100mW (20dBm), adjustable between 1-20dBm
Interface: Standard TTL UART
Connection status: L ED indicators
FPV Radio telemetry air module size: 50 x 27 x 10mm
FPV Radio telemetry ground module size: 70 x 22 x 11mm
Package size: 165 x 80 x 11mm
Color: Black
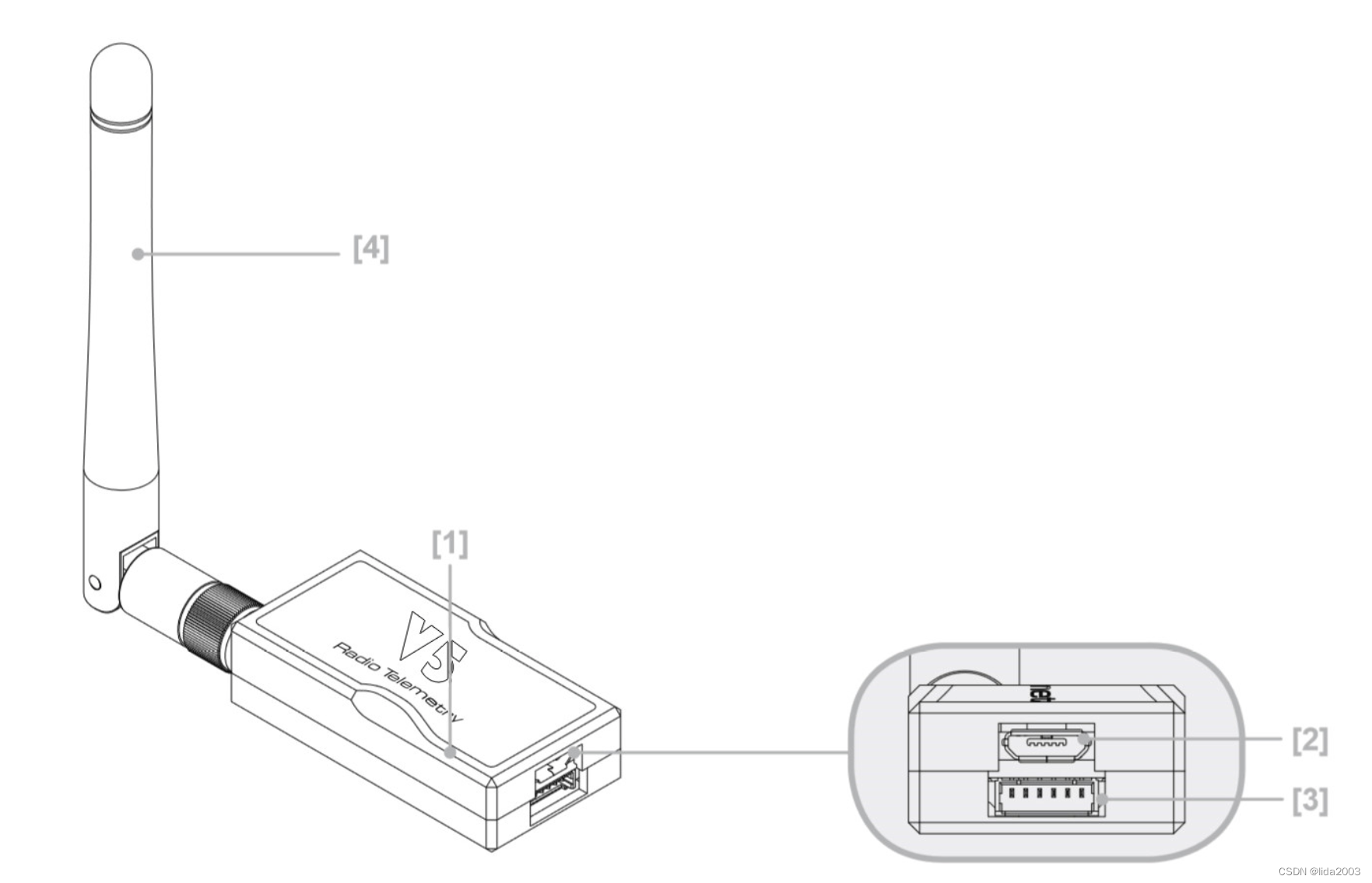

因此我们找了PX4飞控引出给电传使用的引脚定义,然后找到VCC/GND/TX/RX,这样就能够进行连接。
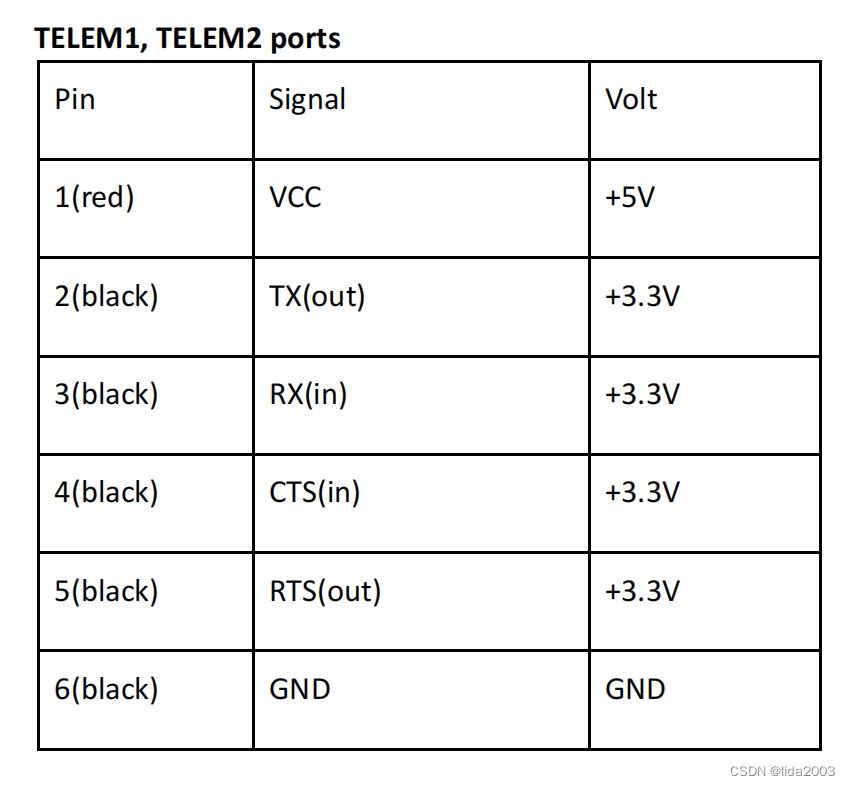
最终,测试得出结果如下(CTS/RTS可以不接):
4.2 配置
可参考如下视频:
ArduCopter setup and first flights
Ardupilot Drone Build How-To Series Part 1- Basic Hardware
Ardupilot Drone Build How-To Series Part 2- GPS Setup
Ardupilot Compass Configuration CAN - Serial - Drone Build How-To Series Part 3
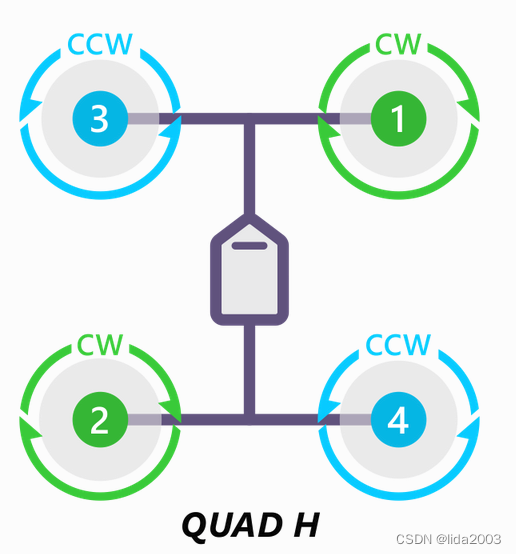
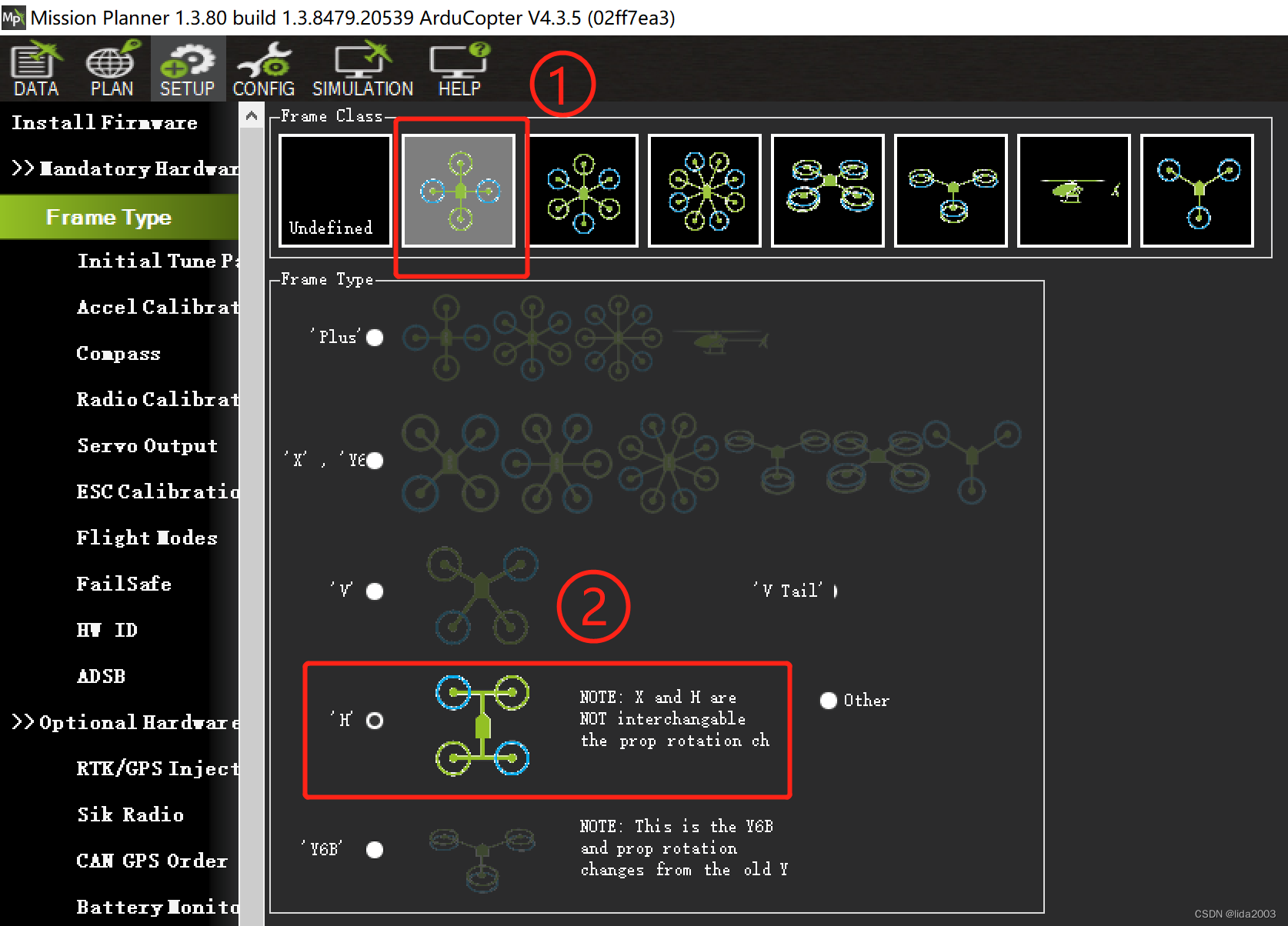
4.2.1 选择四轴机型
因为使用的是外置PWM电调,所以只要把机型选对,转向到时候可以手动调整。
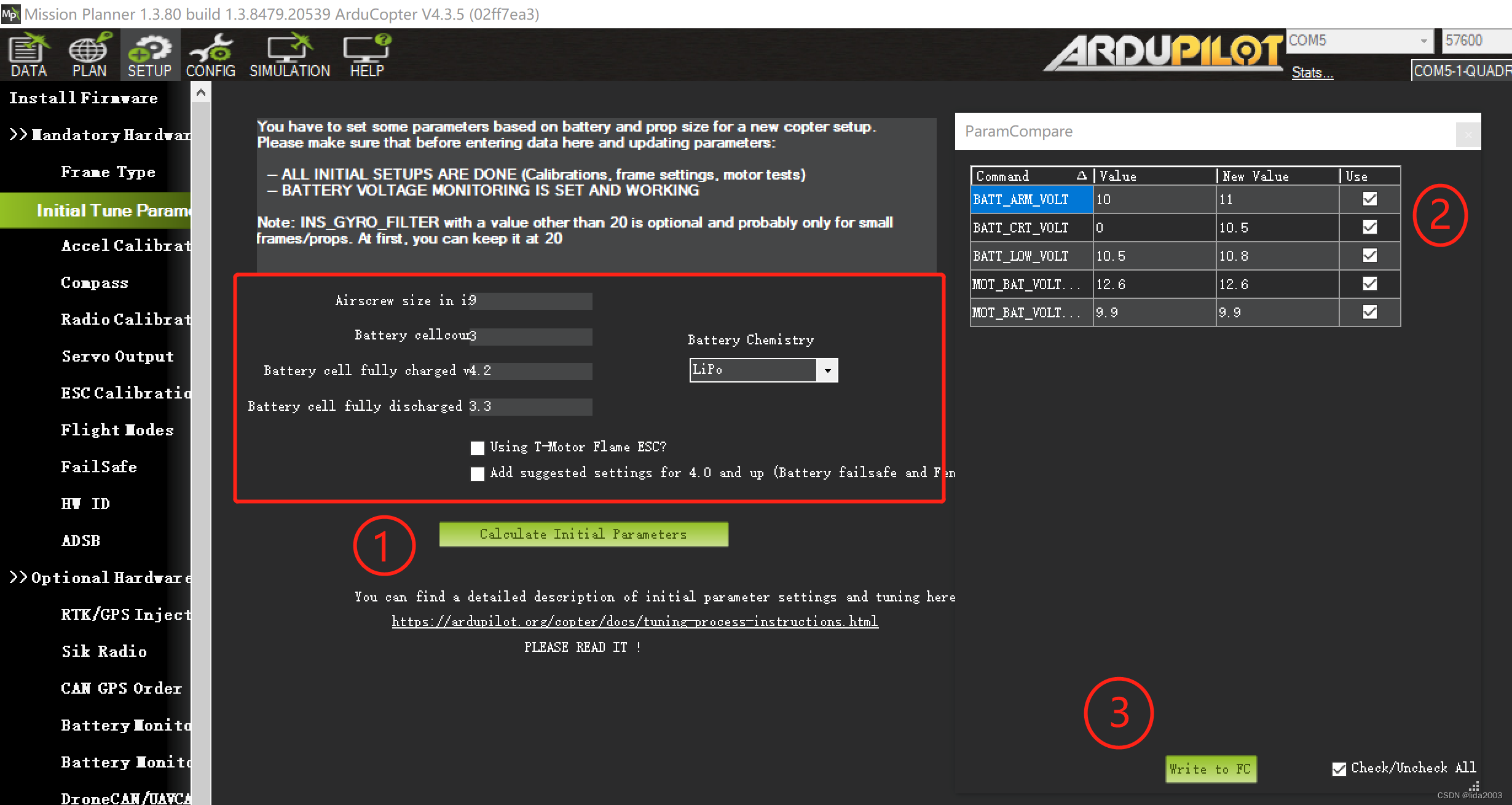
4.2.2 电源参数调整
采用的是3S电池,所以调整Battery CellCount
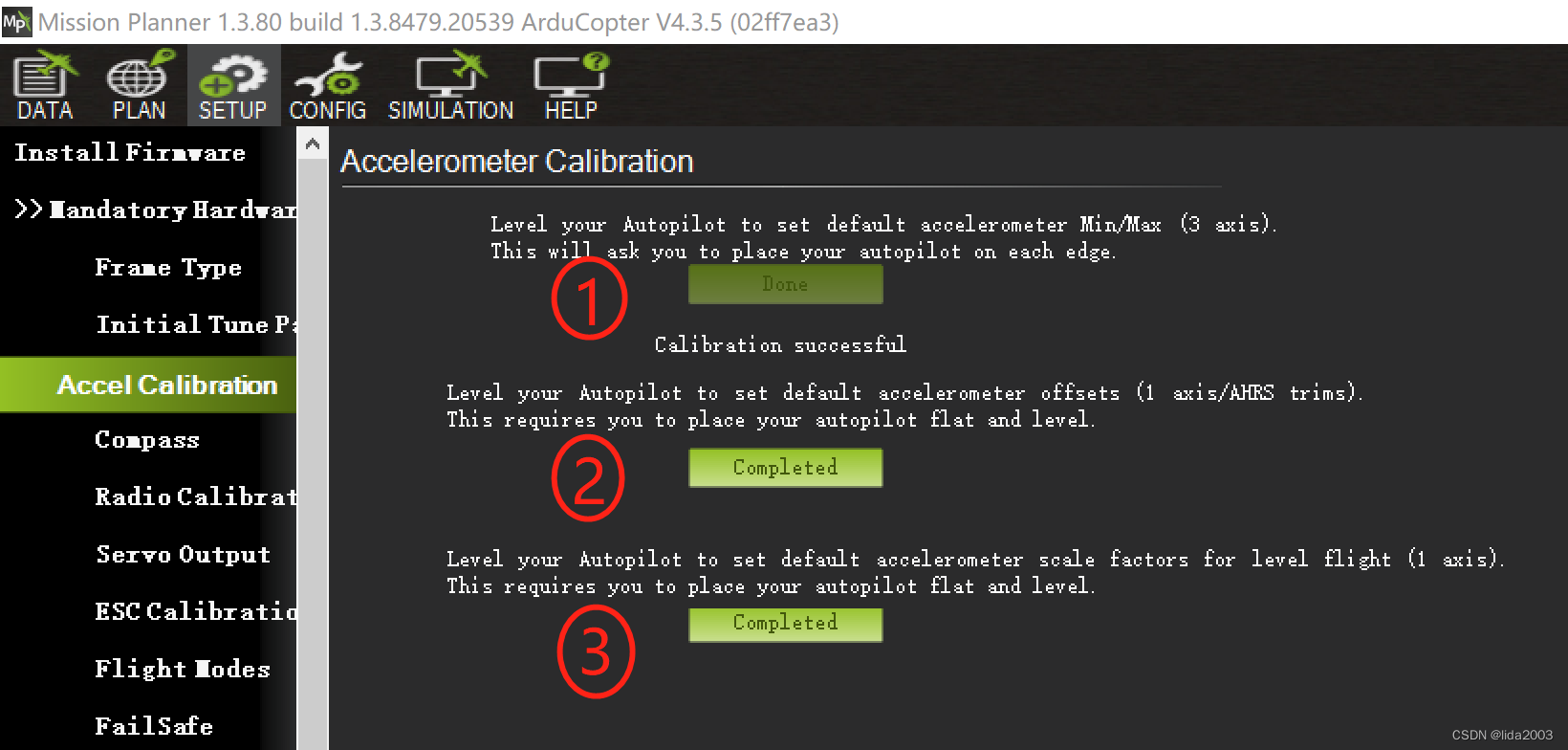
4.2.3 校准加速度计
请一次根据页面提示进行操作,逐步校准IMU。
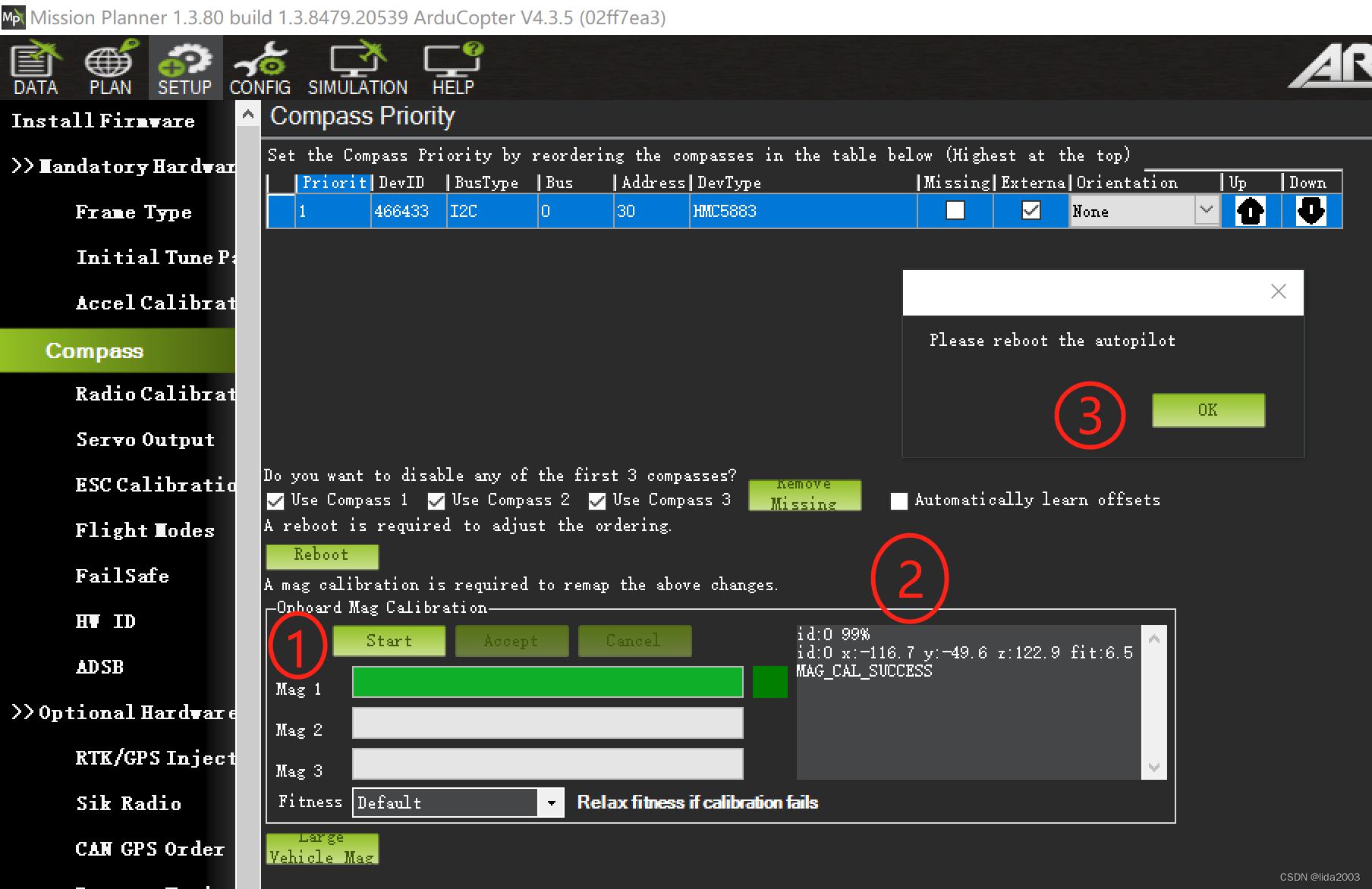
4.2.4 校准磁力计
最好用电池,拿掉桨叶。连着USB线,翻转不是很方便。
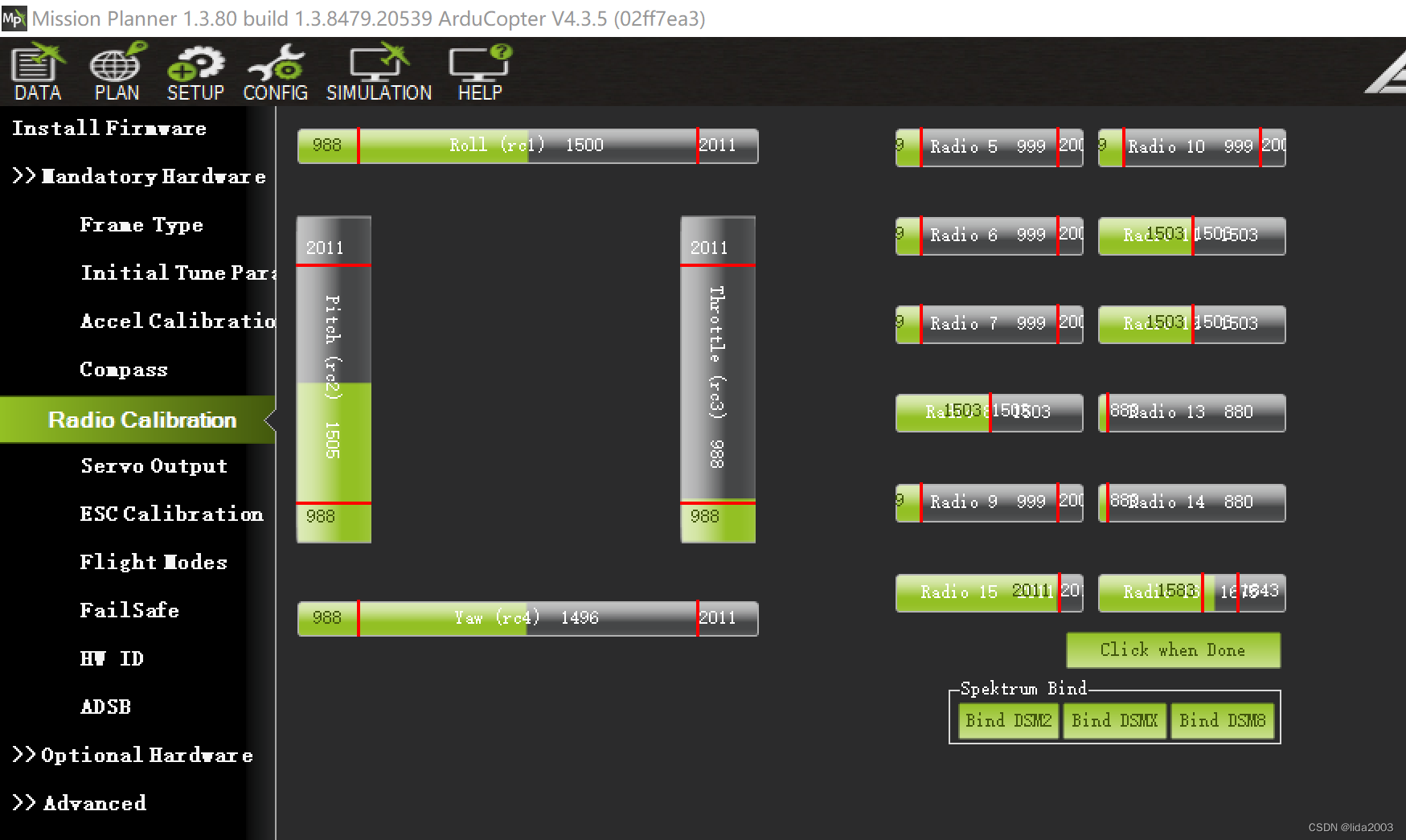
4.2.5 遥控器校准
主要是对遥控器各个通道的范围进行校准。
注:这里需要注意的是一个飞行模式,最多有6个模式,需要好好的研究下遥控器使用手册。这里只是简单示意。
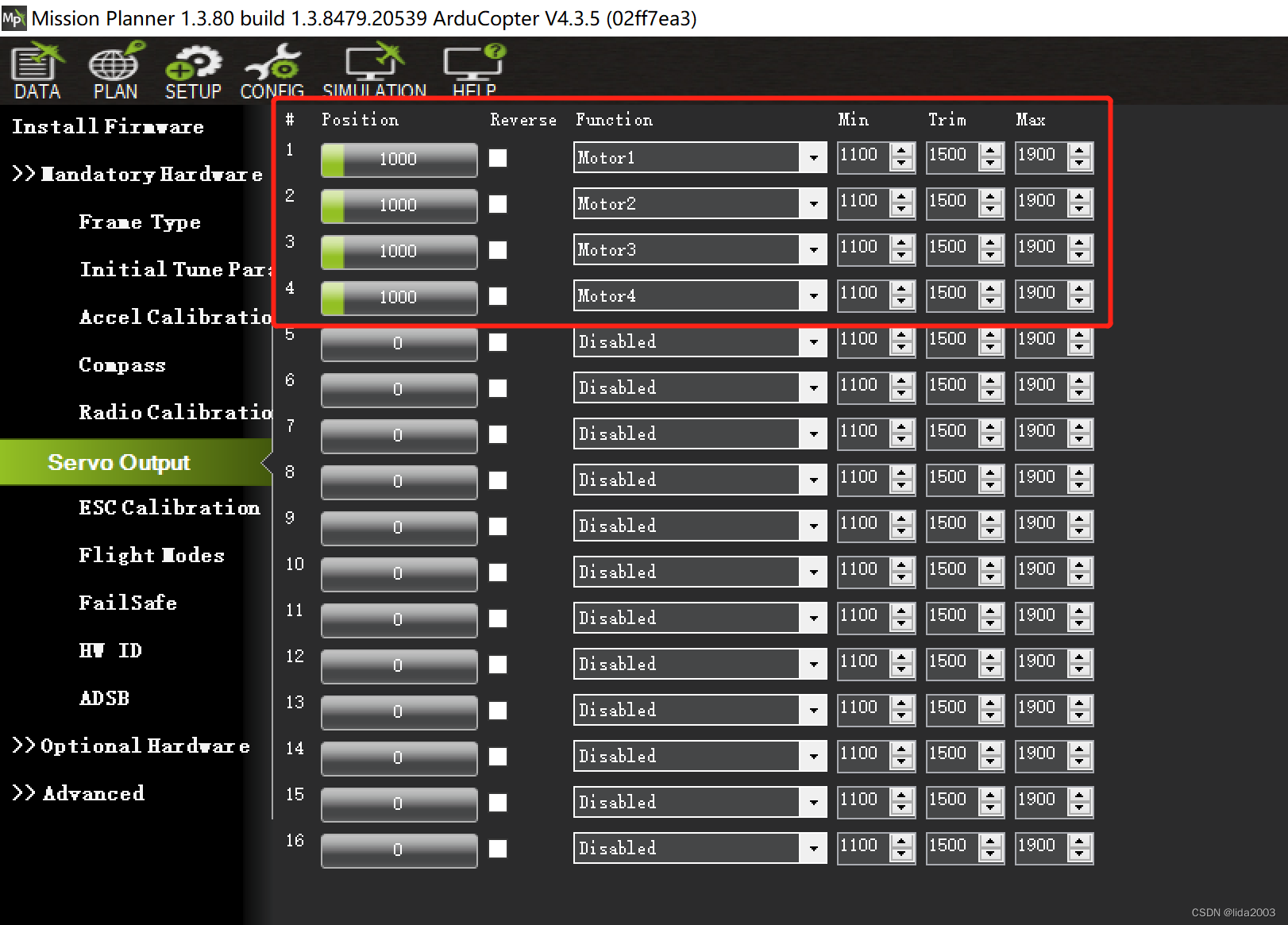
4.2.6 电机设置
四轴电机,主要是#1 #2 #3 #4,四个电机设置。
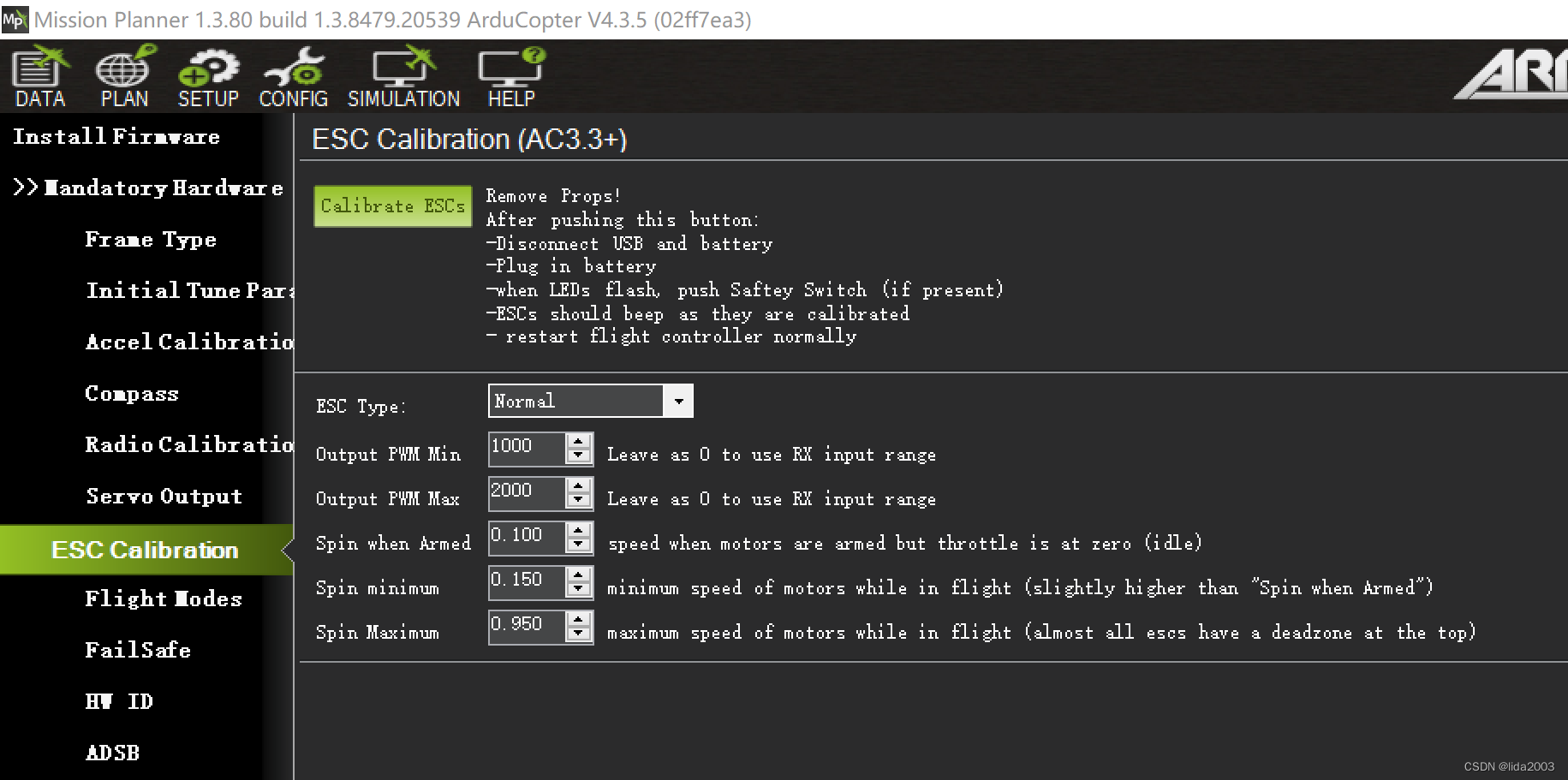
4.2.7 电调校准
请按照UI上面的提示进行操作。
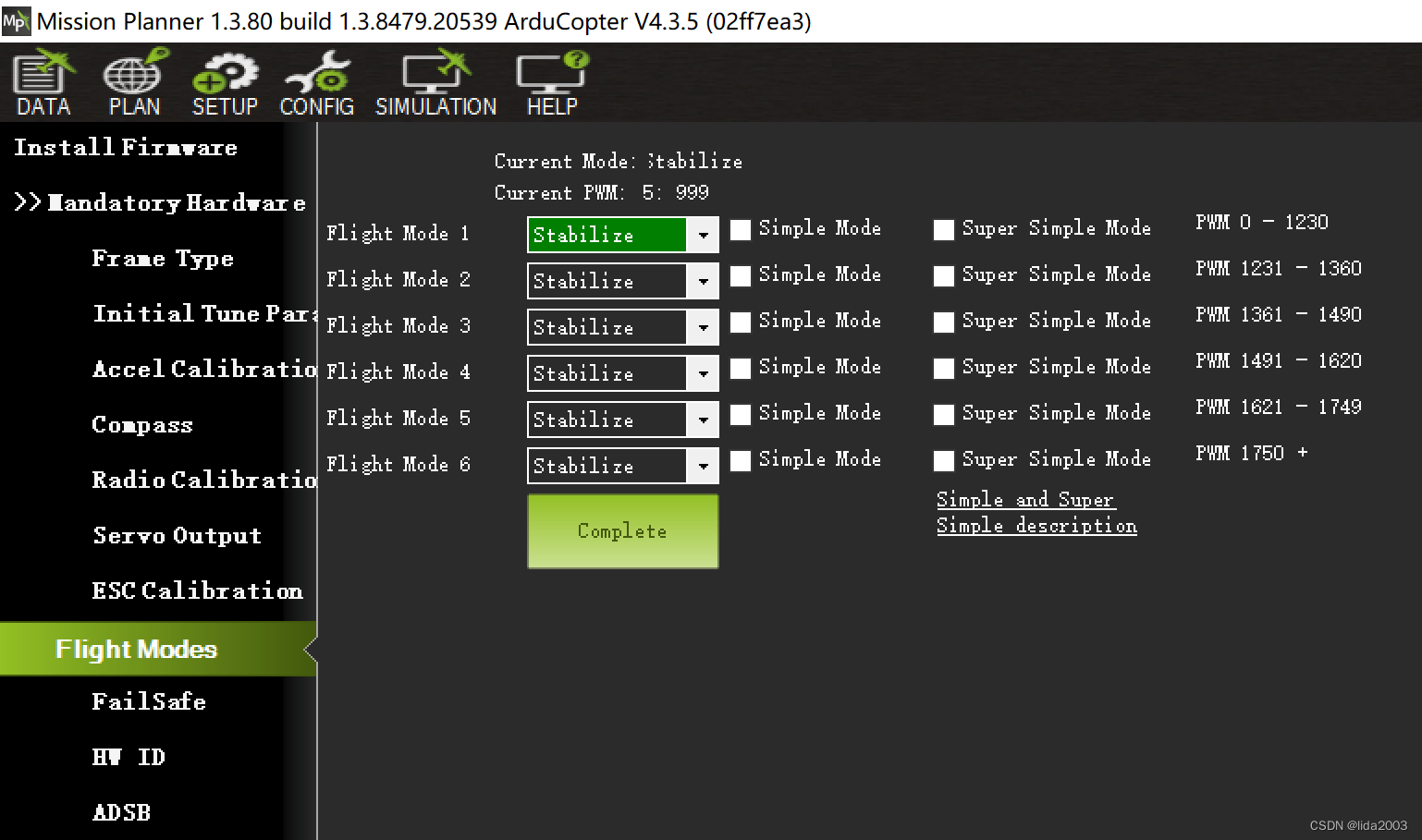
4.2.8 飞行模式
这里笔者使用默认(所有的都是stabilize),直接手动自稳飞行。
注:关于模式的设置,后续会专门结合Mission Planner或QGC进行解释给出。
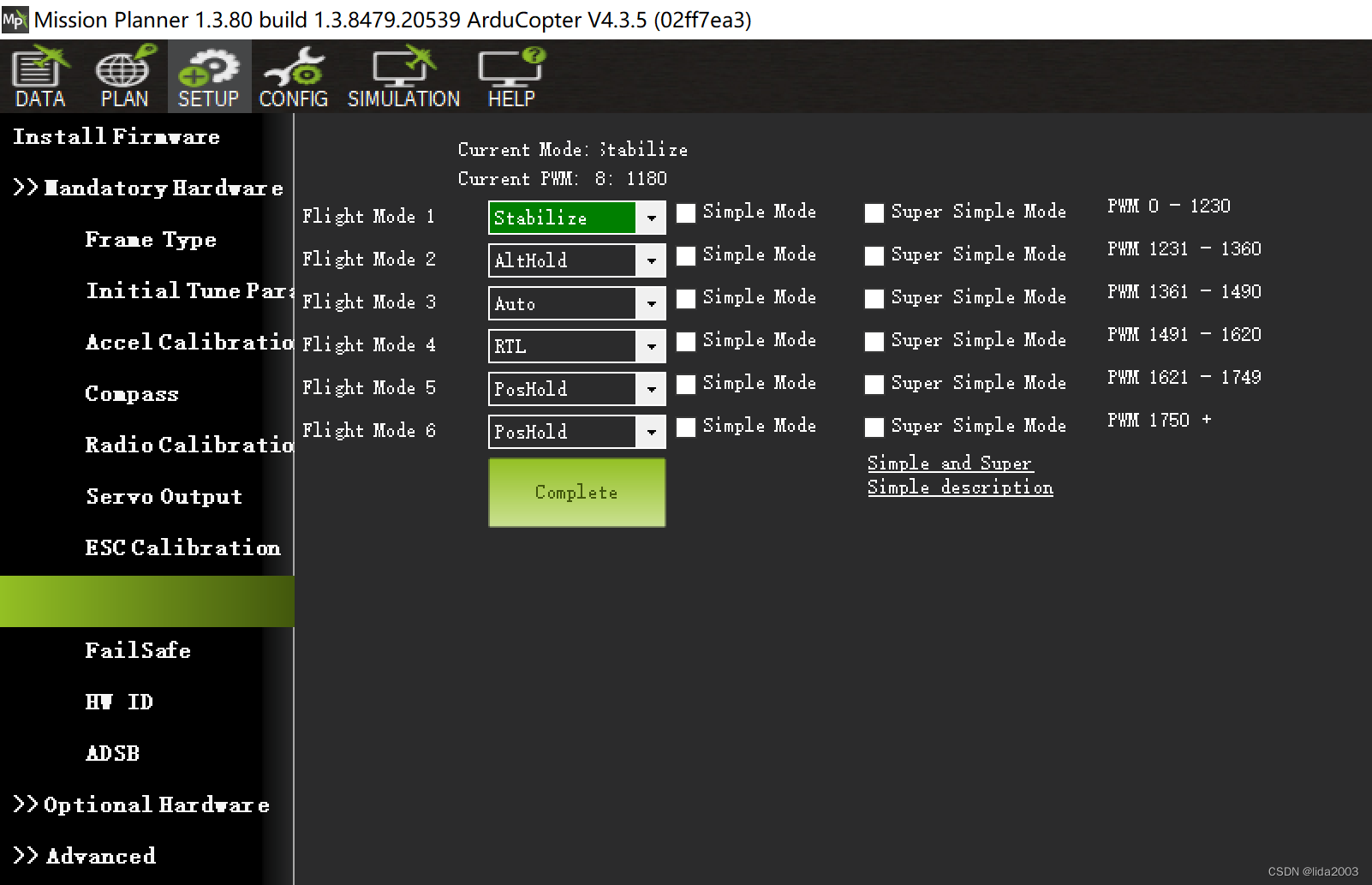
笔者TX12配置的飞行模式如下所示:
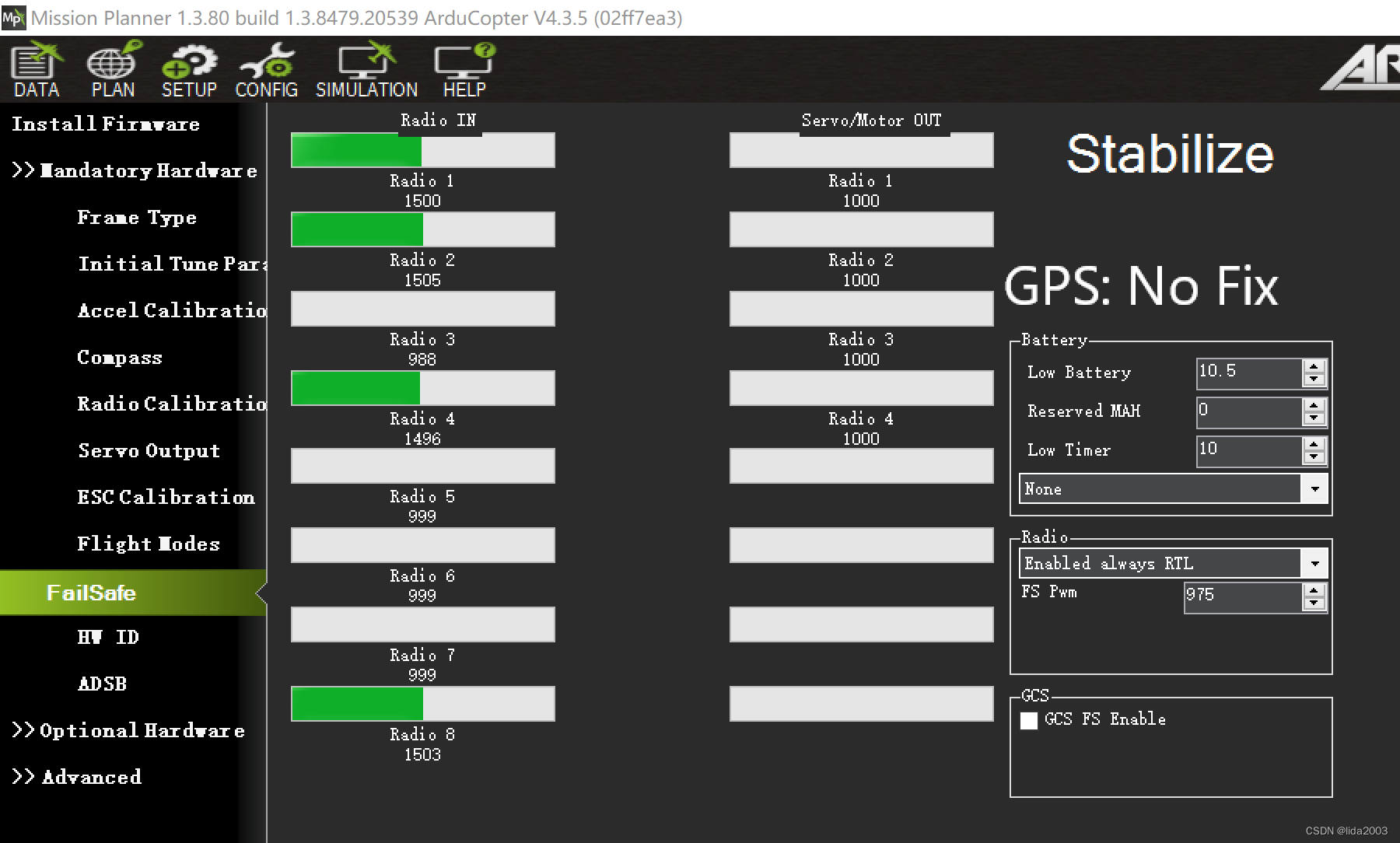
4.2.9 Failsafe设置
新手刚接触Ardupilot,建议采用默认。
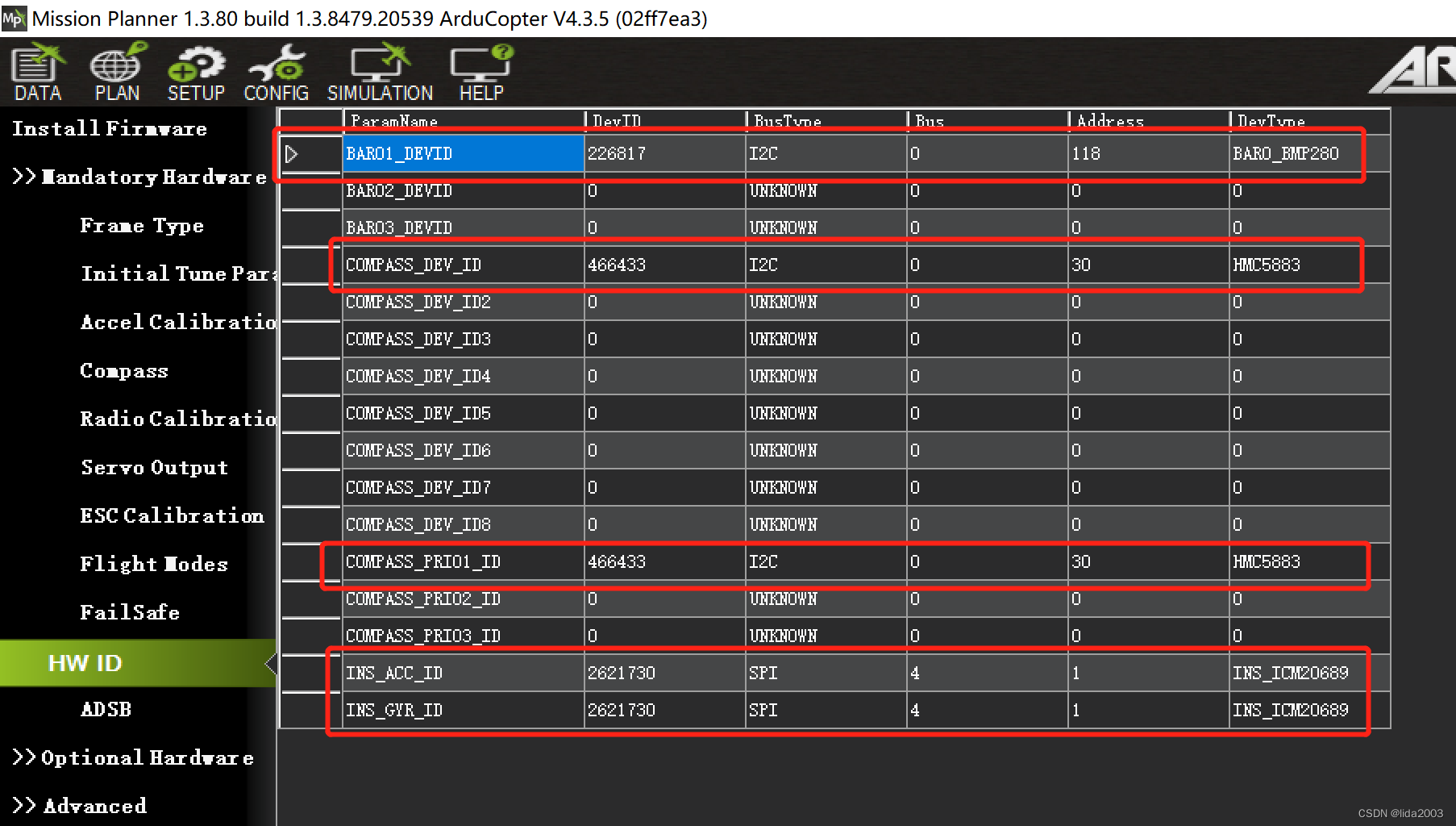
4.2.10 检查硬件情况
这里主要是Baro/MagMeter/IMU识别情况,请确认硬件识别是否正确。
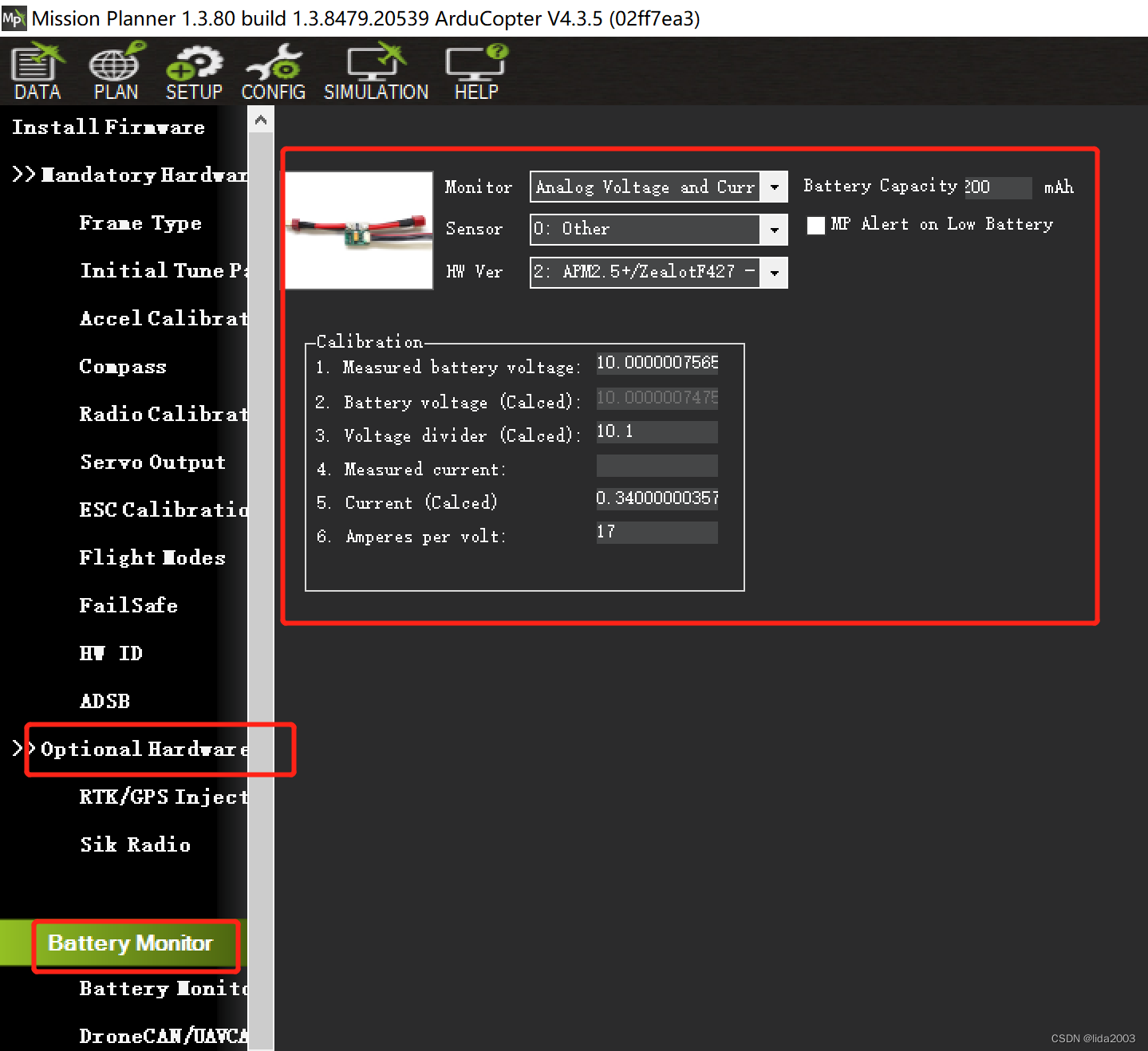
4.2.11 额外电源监测设置
Google/Baidu没有找到这块KakuteF7 AIO的设置方法,但是如下设置确实可以正确的识别电压。
注:鉴于目前使用了PDB板,所以电流无法获取。
5. 总结
经过上面的基本配置,ArduPilot飞控DIY-F450初步整机情况如下:
MissionPlanner界面

硬件连线
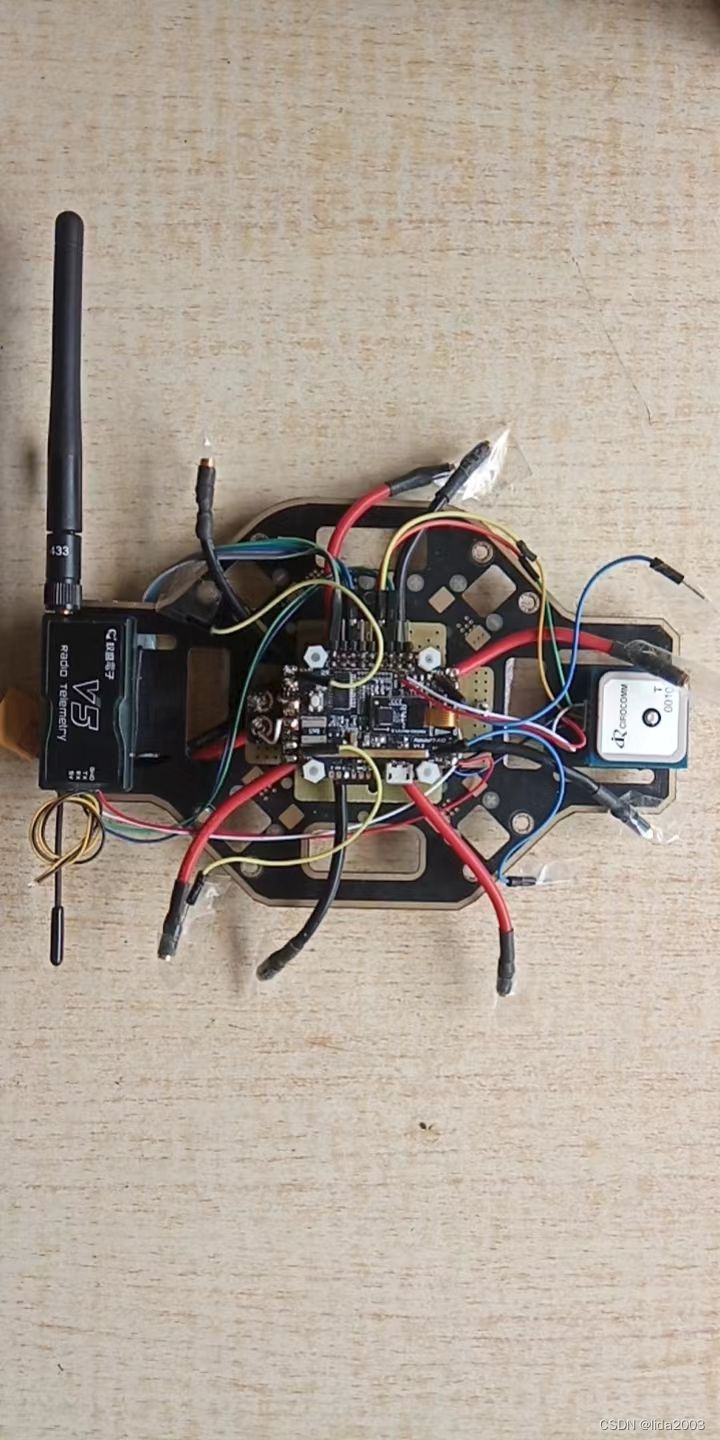
整机情况