国产航顺HK32F030M:定时器计数/PWM输出/输出翻转/输入捕获
定时器计数
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "hk32f030m.h"
#include "hk32f030m_gpio.h"
#include <stdio.h>
#include "stdarg.h"
uint16_t CCR1_Val = 5000;
uint16_t CCR2_Val = 2500;
uint16_t CCR3_Val = 1250;
uint16_t CCR4_Val = 625;
uint16_t PrescalerValue = 0;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM_Config(void);
void GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
void TIM6_IRQHandler(void);
int main(void)
/* Infinite loop */
{
RCC_Configuration();
GPIO_Configuration();
TIM_Config();
while (1)
{
}
}
/*配置时钟*/
void RCC_Configuration(void)
{
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOA, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOB, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOC, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOD, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6 , ENABLE);
}
/*配置GPIO*/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//GPIOA,PA1,PA2,PA3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//GPIOD,PD4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_Init(GPIOD, &GPIO_InitStructure);
}
/*配置TIMER*/
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 预分频器值 // SystemCoreClock = 48M,计数器时钟counter clock = 1 MHz
// PrescalerValue = (uint16_t) (SystemCoreClock / 1000000) - 1;// 32MHz
PrescalerValue = (uint16_t) (SystemCoreClock / 10000) - 1;// 3200
/* Enable the TIM1 gloabal Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM6_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0; // 中断优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Time Base configuration */
// 公式:Tout= ((arr+1)*(psc+1))/Tclk
// 1s = ((10000+1)*(3200+1))/32000000
// 0.5s = ((5000+1)*(3200+1))/32000000
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;// 预分频系数 3200
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;// 计数模式:向上计数
TIM_TimeBaseStructure.TIM_Period = 5000; // 自动重载值 10000,计数模式为向上计数时,定时器从0开始计数,计数超过到arr时触发定时中断服务函数
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure);
/* TIM Interrupts enable */
TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE);
/* TIM1 counter enable */
TIM_Cmd(TIM6, ENABLE);
}
/*配置IO翻转*/
void GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->ODR ^= GPIO_Pin; // 输出翻转
}
uint16_t capture = 0;
void TIM6_IRQHandler(void)
{
if (TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM6, TIM_IT_Update); //每次进入中断都要清空中断标志,否则主函数将无法正常执行
/* PA1 toggling with frequency = 50 Hz */
GPIO_TogglePin(GPIOD ,GPIO_Pin_4);// PD4 翻转
// capture = TIM_GetCapture1(TIM1);
//
// TIM_SetCompare1(TIM1, capture);
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
}
#endif /* USE_FULL_ASSERT */
公式:Tout= ((arr+1)*(psc+1))/Tclk
1s = ((10000+1)*(3200+1))/32000000
0.5s = 500ms = ((5000+1)*(3200+1))/32000000
实现效果
HK32F030MF4P6定时器计数,分别是从0到10000和0到5000计数
PWM输出
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "hk32f030m.h"
#include "hk32f030m_gpio.h"
#include <stdio.h>
#include "stdarg.h"
uint16_t TimerPeriod = 0;
uint16_t Channel1Pulse = 0, Channel2Pulse = 0, Channel3Pulse = 0, Channel4Pulse = 0;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM_Config(void);
int main(void)
/* Infinite loop */
{
RCC_Configuration();
GPIO_Configuration();
TIM_Config();
while (1)
{
}
}
/*配置时钟*/
void RCC_Configuration(void)
{
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOA, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOB, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOC, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOD, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 , ENABLE);
}
/*配置GPIO*/
void GPIO_Configuration(void)
{
//GPIOA Configuration: Channel 1N, 2N, 3N
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource1,GPIO_AF_3);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_3);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_3);
//GPIOC Configuration: Channel 1, 2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_3);
GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_3);
/*PD3 = TIMER Channel 3*/
//GPIOD Configuration: Channel 3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource3,GPIO_AF_3);
/*PD4 = TIMER Channel 4*/
//GPIOD Configuration: Channel 4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource4,GPIO_AF_3);
// //GPIOB Configuration: Break
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_3);
// /*PC3 = TIMER Channel 3*/
// GPIO_IOMUX_PinAFConfig(GPIOC,GPIO_PinSource3,IOMUX_PC3_TIM1CH3);
// //GPIOC Configuration: Channel 3 PC3
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
// GPIO_Init(GPIOC, &GPIO_InitStructure);
// GPIO_PinAFConfig(GPIOC,GPIO_PinSource3,GPIO_AF_3);
}
/*配置TIMER*/
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
TimerPeriod = (SystemCoreClock / 3200 ) - 1;//SystemCoreClock=32MHZ // 自动重载值是10000
/* Compute CCR1 value to generate a duty cycle at 50% for channel 1 and 1N */
Channel1Pulse = (uint16_t) (((uint32_t) 5 * (TimerPeriod - 1)) / 10);
/* Compute CCR2 value to generate a duty cycle at 37.5% for channel 2 and 2N */
Channel2Pulse = (uint16_t) (((uint32_t) 375 * (TimerPeriod - 1)) / 1000);
/* Compute CCR3 value to generate a duty cycle at 25% for channel 3 and 3N */
Channel3Pulse = (uint16_t) (((uint32_t) 25 * (TimerPeriod - 1)) / 100);
/* Compute CCR4 value to generate a duty cycle at 12.5% for channel 4 */
Channel4Pulse = (uint16_t) (((uint32_t) 125 * (TimerPeriod- 1)) / 1000);
/* Time Base configuration */
TIM_TimeBaseStructure.TIM_Prescaler = 0;// 预分频系数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStructure.TIM_Period = TimerPeriod;// 自动重载值
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//一般不使用,默认TIM_CKD_DIV1
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
/* Channel 1, 2,3 and 4 Configuration in PWM mode */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_Pulse = Channel1Pulse;//设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_Low;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse = Channel2Pulse;
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse = Channel3Pulse;
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse = Channel4Pulse;
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
// /* Automatic Output enable, Break, dead time and lock configuration*/
// TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
// TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
// TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1;
// TIM_BDTRInitStructure.TIM_DeadTime = 50;
// TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable;
// TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;
// TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;
// TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);
/* TIM1 counter enable */
TIM_Cmd(TIM1, ENABLE);
/* TIM1 Main Output Enable */
TIM_CtrlPWMOutputs(TIM1, ENABLE);
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
}
#endif /* USE_FULL_ASSERT */
实验结果
50%占空比

周期316us怎么来的?
自动重载值、预分频系数和周期计算公式:
公式:Tout= ((arr+1)*(psc+1))/Tclk
- Tout 周期/溢出时间 单位us
- Tclk 系统时钟 单位Mhz (这里是32MHZ)
(10000 + 1)*( 0 + 1 )/ 32000 000 = 0.00031253s = 31254ms =
312.54us
37.5%占空比

25%占空比

12.5%占空比

翻转输出
HK32F030MF4P6 定时器TIMER输出翻转
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "hk32f030m.h"
#include "hk32f030m_gpio.h"
#include <stdio.h>
#include "stdarg.h"
uint16_t TimerPeriod = 0; // 自动重载值
uint16_t Channel1Pulse = 0;// 脉冲宽度
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM_Config(void);
int main(void)
/* Infinite loop */
{
RCC_Configuration();
GPIO_Configuration();
TIM_Config();
while (1)
{
}
}
/*配置时钟*/
void RCC_Configuration(void)
{
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOA, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOB, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOC, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOD, ENABLE );
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
}
/*配置GPIO*/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
/*PD4 = TIM2 Channel 1*/
//GPIOD Configuration: Channel 1
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource4,GPIO_AF_4);
}
/*配置TIMER*/
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 频率配置为100KHZ SystemCoreClock = 32Mhz(内部高速时钟) 自动重载值 = 32Mhz/100 000 - 1 = 3199
TimerPeriod = (SystemCoreClock / 100000 ) - 1;
/* Compute CCR1 value to generate a duty cycle at 50% for channel 1 */
// 脉宽值 // 5*(3199-1)/10 = 1599
// duty cycle 占空比为 1/2 = 50%
Channel1Pulse = (uint16_t) (((uint32_t) 5 * (TimerPeriod - 1)) / 10);
/* Time Base configuration */
TIM_TimeBaseStructure.TIM_Prescaler = 0;//预分频系数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStructure.TIM_Period = TimerPeriod;//自动重载值3200
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* Channel 1 Configuration in PWM mode */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;//翻转
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = Channel1Pulse;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
//TIM_SelectOnePulseMode(TIM2, TIM_OPMode_Single);
/* TIM2 counter enable */
TIM_Cmd(TIM2, ENABLE);
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
}
#endif /* USE_FULL_ASSERT */
输入捕获


/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "hk32f030m.h"
#include "hk32f030m_gpio.h"
#include <stdio.h>
#include "stdarg.h"
USART_InitTypeDef USART_InitStructure;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM_Config(void);
void USART_Configuration(void);
void softWareDelay(void);
void TIM1_CC_IRQHandler(void);
int main(void)
/* Infinite loop */
{
RCC_Configuration();
GPIO_Configuration();
TIM_Config();
while (1)
{
}
}
/*配置时钟*/
void RCC_Configuration(void)
{
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOA, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOB, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOC, ENABLE );
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOD, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
}
/*配置GPIO*/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
/*PC6 = TIM1 Channel 1*/
//GPIOC Configuration: Channel 1
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_3);
}
/*配置TIMER*/
void TIM_Config(void)
{
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* TIM1 configuration: Input Capture mode ---------------------
The external signal is connected to TIM1 CH1 pin (PC.06)
The Rising edge is used as active edge,
The TIM1 CCR1 is used to compute the frequency value
------------------------------------------------------------ */
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿触发
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//方向选择定义到TI1上
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//捕获预分频,多少个上升沿触发一次
TIM_ICInitStructure.TIM_ICFilter = 0x0;//数字滤波配置
TIM_ICInit(TIM1, &TIM_ICInitStructure);
/* TIM enable counter */
TIM_Cmd(TIM1, ENABLE);
/* Enable the CC1 Interrupt Request */
TIM_ITConfig(TIM1, TIM_IT_CC1, ENABLE);
/* Enable the TIM1 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
uint16_t IC3ReadValue1 = 0, IC3ReadValue2 = 0;
uint16_t CaptureNumber = 0; // 捕获成功/失败 标识位
uint32_t Capture = 0; // 捕获
uint32_t TIM1Freq = 0;//频率
// 定时器1 中断你服务函数
void TIM1_CC_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_CC1) == SET)
{
/* Clear TIM1 Capture compare interrupt pending bit */
TIM_ClearITPendingBit(TIM1, TIM_IT_CC1);
if(CaptureNumber == 0)
{
/* Get the Input Capture value */
IC3ReadValue1 = TIM_GetCapture1(TIM1);
CaptureNumber = 1;
}
else if(CaptureNumber == 1)
{
/* Get the Input Capture value */
IC3ReadValue2 = TIM_GetCapture1(TIM1);
/* Capture computation */
if (IC3ReadValue2 > IC3ReadValue1)
{
Capture = (IC3ReadValue2 - IC3ReadValue1);
}
else if (IC3ReadValue2 < IC3ReadValue1)
{
Capture = ((0xFFFF - IC3ReadValue1) + IC3ReadValue2);
}
else
{
Capture = 0;
}
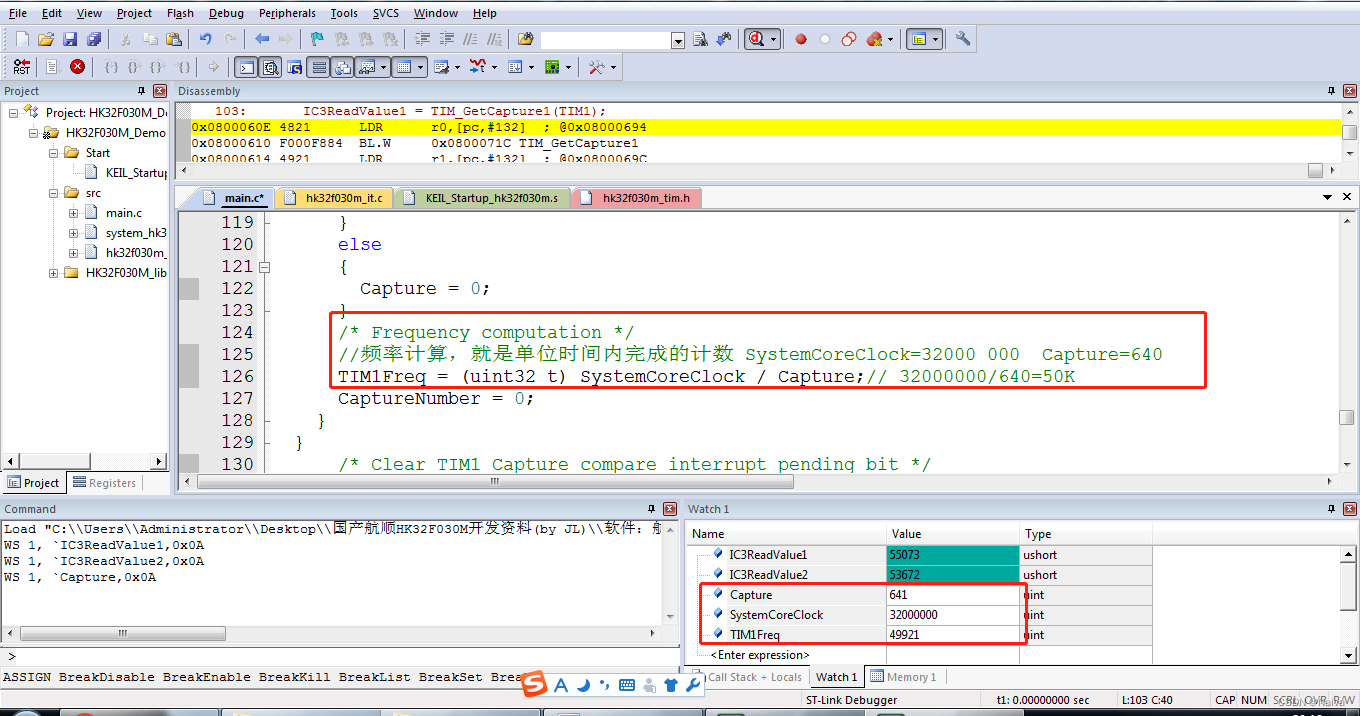
/* Frequency computation */
TIM1Freq = (uint32_t) SystemCoreClock / Capture;//频率计算
CaptureNumber = 0;
}
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
}
#endif /* USE_FULL_ASSERT */
参考资料
- [1] 国产航顺HK32F030M开发资料(by JL)\软件:航顺HK32F030M\航顺HK32F030M库文件\HK32F030Mxx_ExampleV1.0.15\HK32F030Mxx_Example\project\15 TIM\TIMER例程\TIMER输出翻转