yo!这里是进程间通信
目录
前言
进程间通信简介
目的
分类
匿名通道
介绍
举例(进程池)
命名管道
介绍
举例
共享内存
介绍
共享内存函数
1.shmget
2.shmat
3.shmdt
4.shmctl
举例
1.框架
2.通信逻辑
消息队列
信号量
同步与互斥
理解信号量
后记
前言
之前介绍到进程说过,进程具有独立性,也就是说两个进程之间没有相交的部分,没有共享的部分,那如何实现标题所说的通信呢?我们一定能先想到,一方将信息放到某个地方,然后另一方去拿,这不就实现了所谓的通信了,实际也是这样,进程间通信就是让两个或多个进程看到同一块资源(空间),对应的实现也是有很多种。其中,在本文我们详细介绍匿名管道、命名管道、共享内存,简单介绍消息队列、信号量,快往下看看吧!
进程间通信简介
-
目的
进程间通信的目的,包括数据传输、共享资源、通知、进程控制。其中,
数据传输:一个进程需要发送给另一个进程一些数据;
共享资源:多个进程之间共享同一份资源;
通知:一个进程需要通知另一个或多个进程发生了某个事件(如进程终止时要通知父进程);
进程控制:有些进程可以控制另一个进程的执行(如Debug进程),此时控制进程能够拦截另一个进程的所有陷入和异常,并能够及时知道它的状态改变。
-
分类
进程间通信的方法分类大致可以分为三类,包括管道、System V IPC(进程间通信InterProcess Communication)、POSIX IPC。
其中,
管道:
匿名管道
命名管道
System V IPC:
System V 消息队列
System V 共享内存
System V 信号量
POSIX IPC:
消息队列
共享内存
信号量
互斥量
条件变量
读写锁
对于System V IPC,侧重于本地通信,也就是一台机器上的多个进程进行通信;对于POSIX IPC,其将网络通信纳入到进程间通信,既能本地通信,又能远程通信。下面我们将详细介绍管道、System V 共享内存,简单介绍System V 消息队列、System V 信号量。
匿名通道
-
介绍
首先,我们把一个进程连接到两一个进程的一个数据流叫做管道,匿名管道就是之前所用的【 | 】,比如将当前路径信息输入到draft.txt文件中,如下图:
但这是指令实现的管道,代码如何实现呢?如下:
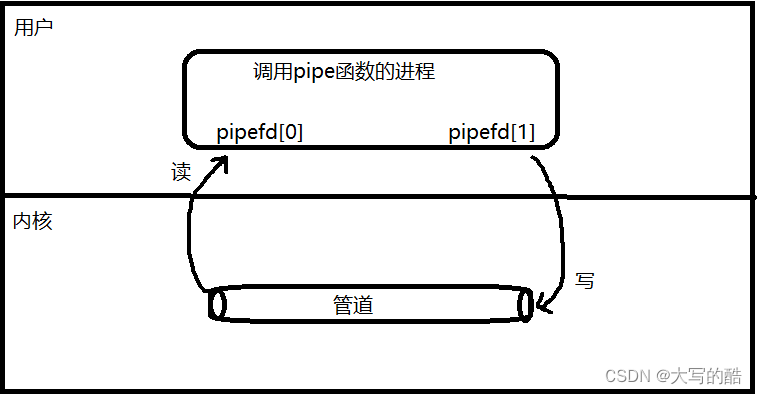
其中,pipefd是一个文件描述符数组,里面可以放两个文件描述符,pipefd[0]表示读端,pipefd[1]表示写端;返回值:成功返回0,否则返回-1,且设置errno。
注意:
pipefd数组是一个输出型参数,我们传入一个空数组,函数内会将打开的读写fd对应放入数组内带出,函数外就可以通过pipefd[0]、pipefd[1]从写端向读端传输数据,如下图可方便理解:


-
举例(进程池)
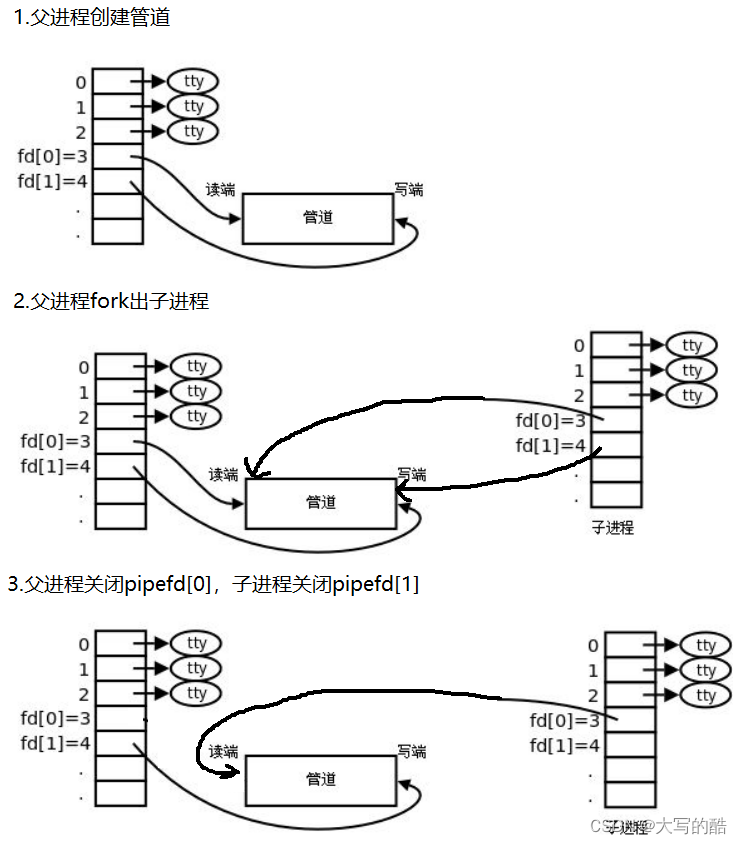
进程池就是父进程fork出多个子进程,使用进程间通信的方法父进程向子进程发送任务,子进程完成任务返回给父进程。对于父进程fork出来的一个子进程,父进程使用管道文件与子进程进行通信的原理如下:
对于进程池中父进程通信多个子进程的原理亦是如此,看如下代码实现。
主函数框架:
进程池首先需要一个vector记录创建的所有子进程,父进程发送任务可随机选择子进程执行任务,接下来就是创建多个子进程和对应管道,将每个子进程的写端关闭,然后子进程就是等待父进程派发任务;对于父进程,在关闭读端之后,开始派发任务,依旧是面向用户的一个菜单,框架与以前写的游戏菜单一样,用户可以选择菜单上的选项进行操作,用户操作结束以后,紧接着关闭所有的fd以及父进程等待接收子进程,以免子进程成为僵尸进程。
代码:
#include <iostream>
#include <vector>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <assert.h>
#include "Task.hpp"
#define PROCESS_NUM 5
int main()
{
vector<pair<pid_t, int>> process_vec;
// 创建多个子进程
for (int i = 0; i < PROCESS_NUM; i++)
{
// 创建管道 //注意:管道创建要在循环里面
int pipefd[2] = {0};
int res = pipe(pipefd);
assert(res == 0);
pid_t id = fork();
if (id == 0)
{
// 子进程:读,关闭写
close(pipefd[1]);
while (true)
{
//接收任务
}
exit(1);
}
// 父进程:写,关闭读
close(pipefd[0]);
process_vec.push_back(make_pair(id, pipefd[1])); //记录进程
}
// 派发任务
int select;
srand((unsigned int)time(nullptr));
do
{
usleep(100000);
printf("**************************************************\n");
printf("*** 0.quit 1.show tasks 2.execute task ***\n");
printf("**************************************************\n");
printf("请输入:\n");
cin >> select;
if (select == 0)
{
printf("退出成功\n");
}
else if (select == 1)
{
//显示任务
}
else if (select == 2)
{
//发送任务
}
else
{
printf("输入有误\n");
}
} while (select);
//关闭所有fd
//接受收进程
return 0;
}任务(Task.hpp):
首先将所有任务实现在这个头文件中,这里仅有task0、1、2、3四个任务,创建一个vector存储这些任务,此外,再创建一个map存储这些任务的序号和对应介绍(这里只显示名称),以便于主函数菜单中的任务显示(ShowTask()函数),而TaskLoad()函数是在完成vector和map的填充。
代码:
#pragma once
#include <iostream>
#include <string>
#include <vector>
#include <unordered_map>
#include <unistd.h>
#include <functional>
#include <map>
using namespace std;
typedef function<void()> task; //c++11中提出,作为函数指针的平替
vector<task> task_vec;
map<int,string> task_info;
void task0()
{
printf("进程[%d]正在执行任务0\n");
}
void task1()
{
printf("进程[%d]正在执行任务1\n");
}
void task2()
{
printf("进程[%d]正在执行任务2\n");
}
void task3()
{
printf("进程[%d]正在执行任务3\n");
}
void TaskLoad()
{
task_info.insert(make_pair(task_vec.size(),"task0"));
task_vec.push_back(task0);
task_info.insert(make_pair(task_vec.size(),"task1"));
task_vec.push_back(task1);
task_info.insert(make_pair(task_vec.size(),"task2"));
task_vec.push_back(task2);
task_info.insert(make_pair(task_vec.size(),"task3"));
task_vec.push_back(task3);
}
void ShowTasks()
{
for(auto i:task_info)
{
cout<<i.first<<":"<<i.second<<endl;
}
}主函数细节:
首先就是要主函数中上传任务(TaskLoad());对于父进程的执行任务模块,随机采用子进程将任务序号write到管道中,对于子进程的接收任务模块,则是封装了一个函数,以实现如果父进程不发送任务,就堵塞的情形,在函数中,子进程去read管道中的数据,接收任务序号,再调用对应任务即可;对于最后的收尾工作,包括关闭所有fd、接收子进程,很简单,如代码所示。
代码:
#include <iostream>
#include <vector>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <assert.h>
#include "Task.hpp"
#define PROCESS_NUM 5
bool ReceiveTask(int fd,int& task_no)
{
ssize_t n=read(fd,&task_no,sizeof(task_no));
if(n!=sizeof(int)) //保证接收的数据是int大小的字节数
return false;
return true;
}
int main()
{
vector<pair<pid_t, int>> process_vec;
TaskLoad();
// 创建多个子进程
for (int i = 0; i < PROCESS_NUM; i++)
{
// 创建管道 //注意:管道创建要在循环里面
int pipefd[2] = {0};
int res = pipe(pipefd);
assert(res == 0);
pid_t id = fork();
if (id == 0)
{
// 子进程:读,关闭写
close(pipefd[1]);
while (true)
{
//接收任务
int task_no=0;
bool res=ReceiveTask(pipefd[0], task_no);//封装函数意义:如果父进程不发,就堵塞
if(!res)
break;
if(task_no<0||task_no>=task_vec.size())
printf("输入有误\n");
else
task_vec[task_no]();
}
exit(1);
}
// 父进程:写,关闭读
close(pipefd[0]);
process_vec.push_back(make_pair(id, pipefd[1]));
}
// 派发任务
int select;
srand((unsigned int)time(nullptr));
do
{
usleep(100000);
printf("**************************************************\n");
printf("*** 0.quit 1.show tasks 2.execute task ***\n");
printf("**************************************************\n");
printf("请输入:\n");
cin >> select;
if (select == 0)
{
printf("退出成功\n");
}
else if (select == 1)
{
ShowTasks();
}
else if (select == 2)
{
int task_no;
int i = rand() % task_vec.size();
printf("请输入:");
cin >> task_no;
write(process_vec[i].second, &task_no, sizeof(task_no));
}
else
{
printf("输入有误\n");
}
} while (select);
//关闭所有fd
for(auto i:process_vec)
{
close(i.second);
}
//接受收进程
for(auto i:process_vec)
{
int ret=waitpid(i.first,nullptr,0);
}
return 0;
}运行:
通过以上对匿名管道的理解,我们可以发现,管道是具有访问控制的,以下就是其读写规则,即
①当没有数据可以读时,即写的慢,读的快,read调用阻塞,即进程暂停执行,一直等到有数据来到为止;
②当管道满了时,即写的快,读的慢,write调用阻塞,直到有进程读走数据;
③如果所有管道写端对应的文件描述符被关闭,则read返回0,表示读到了管道文件末尾;
④如果所有管道读端对应的文件描述符被关闭,则write操作会产生信号SIGPIPE,进而可能导致write进程退出。
我们也可以总结出匿名管道的特点,如下:
① 只能用于具有共同祖先的进程(具有亲缘关系的进程)之间进行通信;通常,一个管道由一个进程创建,然后该进程调用fork,此后父子进程之间就可应用该管道;
②管道提供流式服务,这与协议有关,后面再说;
③一般而言,进程退出,管道释放,所以管道的生命周期随进程;
④一般而言,内核会对管道操作进行同步与互斥,即提供了访问控制;
⑤管道是半双工的,数据只能向一个方向流动;需要双方通信时,需要建立起两个管道。
命名管道
-
介绍
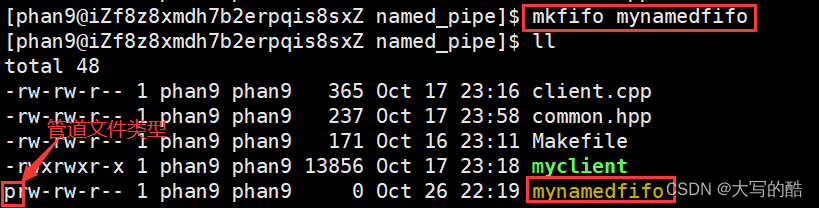
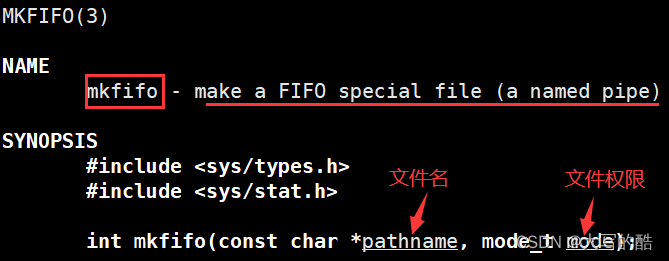
对于匿名管道,很大的一个缺点就是只能在具有公共祖先(如父子进程)的进程间通信,若想要在不相关的进程间通信,下面要讲到的命名管道(FIFO文件)就是方法之一。命令行实现:mkfifo filename,举例如下图:
代码实现:
-
举例
对于服务端,首先是通过mkfifo函数创建命名管道(fifo文件),接着使用open系统调用打开此文件,下面就可以接收用户端的信息了,这里将接收信息封装成了一个函数getMessage(),而且创建了多个子进程来随机接收任务,最后就是收尾工作,包括父进程接收子进程的、关闭管道文件以及删除管道文件;对于getMessage函数,首先创建一个缓冲区存放用户端发送的信息,接着下面是个循环接收信息的过程,通过read系统调用将信息存放至缓冲区内,这里注意对read的返回值分情况讨论,当读到文件末尾时将不再继续读取,break退出。
代码(server):
#include <iostream>
#include <sys/types.h>
#include <sys/wait.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <assert.h>
#include <string.h>
using namespace std;
#define FIFONAME "mypipe"
#define FIFOMODE 0666
void getMessage(int fd)
{
char buffer[1024];
while (true)
{
memset(buffer, '\0', sizeof(buffer));
ssize_t n = read(fd, buffer, sizeof(buffer) - 1);//后续对n的分情况处理较为重要
if(n>0)
{
printf("client[%d]>%s\n", getpid(),buffer);
}
else if(n==0)//读到了文件结尾
{
break;
}
else{
perror("read");
break;
}
}
}
int main()
{
// 创建命名管道
int res = mkfifo(FIFONAME, FIFOMODE);
if (res < 0)
{
perror("mkfifo");
exit(1);
}
printf("创建管道文件成功\n");
// 打开管道文件
int fd = open(FIFONAME, O_RDONLY);
if (fd < 0)
{
perror("open");
exit(2);
}
printf("打开管道文件成功\n");
// 正常操作(读)
int process_nums=5;
for(int i=0;i<process_nums;i++)
{
pid_t id=fork();
if(id==0)
{
getMessage(fd);
exit(3);
}
}
// 接收子进程
for(int i = 0; i < process_nums; i++)
{
waitpid(-1, nullptr, 0);
}
//关闭文件
close(fd);
printf("关闭管道文件成功\n");
//删除管道文件
int ret=unlink(FIFONAME);
assert(res!=-1);
printf("删除管道文件成功\n");
return 0;
}在服务端创建了管道文件之后,用户端也通过系统调用open打开此文件,接下来循环去发送文件,使用系统调用write将信息写进管道文件中,最后收尾工作,将文件fd关闭。
代码(client):
#include <iostream>
#include <sys/types.h>
#include <sys/wait.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <assert.h>
#include <string.h>
using namespace std;
#define FIFONAME "mypipe"
#define FIFOMODE 0666
int main()
{
// 打开通道文件
int fd = open(FIFONAME, O_WRONLY);
assert(fd > 0);
// 开始操作(写)
string message;
while (true)
{
cout << "请输入:\n";
cin >> message;
write(fd, message.c_str(), strlen(message.c_str()));
}
//关闭文件
close(fd);
return 0;
}运行:
以上就是管道的两种类型的全部介绍,我们可以来总结一下两者的区别:
①匿名管道由pipe函数创建并打开,命名管道由mkfifo函数创建,用系统接口open打开;
②匿名管道只能在具有公共祖先(如父子进程)的进程间使用,而命名管道可以在不相关的进程间使用,
除此之外,二者具有相同的功能。
共享内存
-
介绍
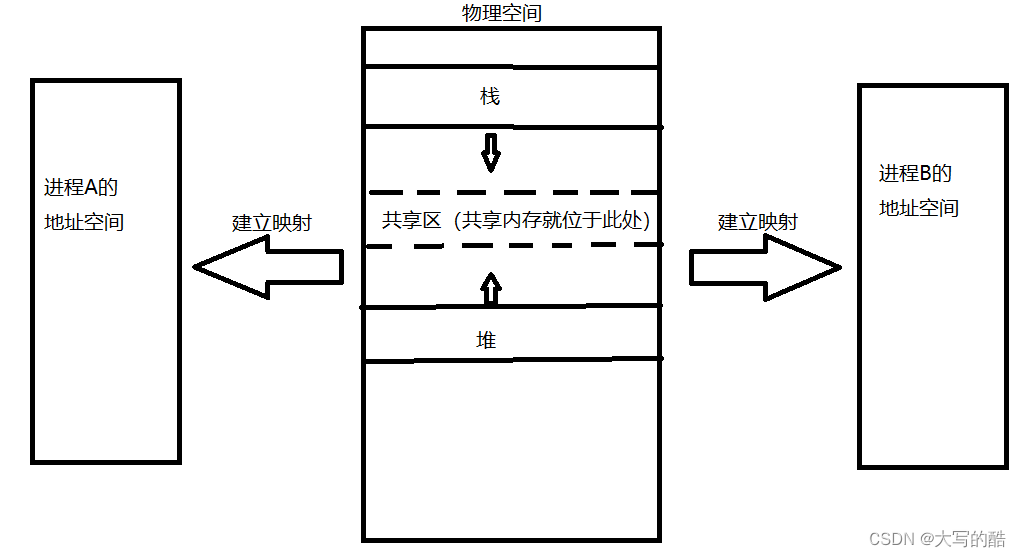
共享内存可以说是最快的IPC(进程间通信)方式,因为其属于内存级的数据传输,且不需要过多的拷贝,当这块资源(内存)映射到涉及的两个进程的地址空间,那么数据传输不需要再输入输出内核空间(只在用户空间中),即不需要再使用read、write等系统调用接口传输数据,与此相对应的是pipe、fifo文件均是件,属于内核空间,需要用read、write等系统调用接口传输数据以致通信。示意图如下:
-
共享内存函数
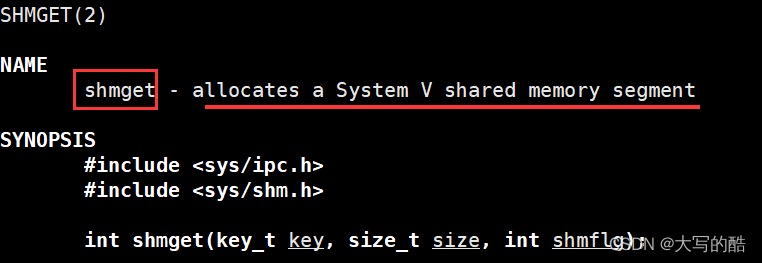
1.shmget
功能:创建共享内存;
参数:
key是关键字,是对于os而言的共享内存标识符,这个值调用ftok函数(下面介绍)由os创建,两个进程创建共享内存时使用同一个key值即是共享了这一块内存;
size是共享内存的大小,建议设置成页大小(4096)的整数倍;
shmflg是权限标志,填IPC_CREAT,表示若底层已存在key标识的共享内存,则获取之并返回,若不存在则创建之并返回;填IPC_CREAT | IPC_EXCL,表示若底层不存在则创建并返回,若存在则出错返回,注意后面还可以再或上八进制权限表示法,设置共享内存的权限;
返回值:成功返回一个非负整数,称为shmid,是对于用户而言的共享内存标识符,失败返回-1。
功能:把一个已存在的路径名和一个整数标识符转换成key;
参数:pathname是路径名,由用户指定,此路径必须存在且可存取;proj_id也是由用户指定,该值必须是一个至少有8个比特位的非零值;
返回值:返回一个key值。
2.shmat
功能:将共享内存挂接(映射)到进程地址空间;
参数:
shmid就是shmget的返回值,是对于用户而言的共享内存标识符;
shmaddr是指定连接的地址,可设置为nullptr成为默认值;
shmflg可设置为0成为默认值;
返回值:成功返回一个指针指向共享内存的第一个字节,失败返回空,用法类似malloc。
3.shmdt
功能:将共享内存脱离当前进程;
参数:指向共享内存的指针shmaddr;
返回值:成功返回0,失败返回-1。
4.shmctl
功能:控制共享内存,常用于删除共享内存;
参数:
shmid是共享内存标识符;
cmd可填入IPC_RMID,表示删除共享内存;
buf可填nullptr表示设置默认值;
返回值:成功返回0,失败返回-1。
注意:system V IPC资源的生命周期随内核,即需要手动(指令)删除或者代码删除,逼向管道资源,生命周期随进程,进程结束资源也就被删除了。
-
举例
1.框架
1).common.hpp
代码:
#pragma once
#include <iostream>
#include <cstdio>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include <sys/wait.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <assert.h>
#include <string.h>
using namespace std;
#define PATHNAME "/home/phan9" //具有访问权限
#define PROJ_ID 0x66 //自定
#define SHM_SIZE 4096 //共享内存的大小,最好是页(PAGE: 4096)的整数倍2).server.cpp
先通过ftok函数创建key值,再通过此key值使用shmget函数创建共享内存,client也是通过此方法创建(识别到)这同一块共享内存,紧接着,将此共享内存通过shmat函数挂接到当前进程上,之后就可以使用shmaddr指针使用此共享内存,这里可以将共享内存当作成一个shmaddr指向的大字符串,通信结束后,先是使用shmdt函数将此共享内存与此进程相脱离,再用shmctl函数删除此共享内存。
代码:
#include "common.hpp"
int main()
{
int res;
//与client通过ftok内部算法创建相同的key
key_t key=ftok(PATHNAME,PROJ_ID);
if(key==-1)
{
perror("ftok");
exit(1);
}
printf("server创建key成功,key:%d\n",key);
//创建shm,服务器是通信的发起者---要创建一个全新的共享内存,所以要使用IPC_CREAT|IPC_EXCL
int shmid=shmget(key,SHM_SIZE,IPC_CREAT|IPC_EXCL|0666);
if(shmid==-1)
{
perror("shmget");
exit(2);
}
printf("server创建共享内存成功,shmid:%d\n",shmid);
//关联共享内存,shmat用法与malloc一样
char* shmaddr=(char*)shmat(shmid,nullptr,0); //最后一个参数设为0,是默认只读的形式关联
if(shmaddr==nullptr)
{
perror("shmat");
exit(3);
}
printf("server关联共享内存成功,shmid:%d\n",shmid);
sleep(5);
//通信
//*****************************************************
//...
//*****************************************************
//共享内存去关联
res=shmdt(shmaddr);
if(res==-1)
{
perror("shmdt");
exit(4);
}
printf("server共享内存去关联成功,shmid:%d\n",shmid);
sleep(5);
//删除共享内存
res=shmctl(shmid,IPC_RMID,nullptr);
if(res==-1)
{
perror("shmctl");
exit(5);
}
printf("server删除共享内存成功,shmid:%d\n",shmid);
return 0;
}3).client.cpp
框架部分,client大部分代码是与server一样的,唯一不同的就是client不需要删除共享内存,因为client不是该共享内存的发起者,应当是server来删除。
代码:
#include "common.hpp"
int main()
{
int res;
//创建key
key_t key=ftok(PATHNAME,PROJ_ID);
if(key==-1)
{
perror("ftok");
exit(1);
}
printf("client创建key成功,key:%d\n",key);
//创建共享内存
int shmid=shmget(key,SHM_SIZE,IPC_CREAT);
if(shmid==-1)
{
perror("shmget");
exit(2);
}
printf("client创建共享内存成功,shmid:%d\n",shmid);
//关联共享内存,shmat用法与malloc一样
char* shmaddr=(char*)shmat(shmid,nullptr,0);
if(shmaddr==nullptr)
{
perror("shmat");
exit(3);
}
printf("client关联共享内存成功,shmid:%d\n",shmid);
sleep(5);
//通信
//*****************************************************
//...
//*****************************************************
//共享内存去关联
res=shmdt(shmaddr);
if(res==-1)
{
perror("shmdt");
exit(3);
}
printf("client共享内存去关联成功,shmid:%d\n",shmid);
sleep(5);
//client不需要删除shm
return 0;
}
4).运行
ipcs -m:查看共享内存
while :; do ipcs -m; sleep 1; done:一秒显示一次共享内存
代码中会用sleep函数模拟通信逻辑部分,先运行server,再运行client可看到如下图情况,运行server,nattach变成1,三秒之后,运行client,nattach变成了2,紧接着server中对共享内存去关联,随即nattach变成了1,在client也去关联之后,nattach变成了0,可见,框架的运行逻辑是没错的,下面看一下通信逻辑的实现。
运行:
2.通信逻辑
1).server.cpp
server将共享内存当成一个字符串,即将shmaddr当成字符串的首地址,举例让server反复去检查共享内存有无信息可以读取,有的话立马读出来,当遇到quit字符串时就退出读取。
代码:
//通信(读)
//server将共享内存当成一个字符串,即将shmaddr当成字符串的首地址
while(true)
{
printf("%s\n",shmaddr);
if(strcmp(shmaddr,"quit")==0)
break;
sleep(1);
}2).client.cpp
client将共享内存当成一个char类型的缓存区,这里我们举例让client反复去写信息,当写到quit字符串时就停止写入。
代码:
//通信(写)
//client将共享内存当成一个char类型的缓存区
while(true)
{
cin>>shmaddr;
if(strcmp(shmaddr,"quit")==0)
break;
}运行:
上图中可见,无论client运不运行,server都在一直从共享内存读消息,当client写进消息时,server能立马读出来,要知道共享内存是内存级的读写,是IPC中最快的,因为不需要过多的拷贝工作,但是共享内存缺乏访问控制,这样会带来并发问题,即client还没将信息写完整,server就已经读到了,这会产生不可控的影响。
那如何做到一定的访问控制呢?
我们知道,管道文件是自带访问控制的,那我们不妨借助管道文件来实现共享内存的访问控制,如下common.hpp代码中,我们首先实现了一个类,来创建和删除管道文件,只要在server中我们定义一个全局变量的该类的对象,那么在运行server时都会自动创建管道文件,运行结束就会自动删除管道文件,紧接着就是为打开和删除管道文件封装的函数,而Wait函数就是实现server读取共享内存中的信息前进行等待的功能,Wake函数就是实现client将消息输入到共享内存后提醒server可以读取消息的功能,其中tmp是通过管道的临时信息,具体使用如代码2、3。
1).common.hpp
#define FIFONAME "./myfifo"
class Init
{
public:
Init()
{
umask(0);
int ret=mkfifo(FIFONAME,0666);
assert(ret==0);
}
~Init()
{
unlink(FIFONAME);
}
};
int OpenFifo(const char* FifoName,int flags)
{
int fd=open(FIFONAME,flags);
assert(fd>=0);
return fd;
}
void CloseFifo(int fd)
{
close(fd);
}
void Wait(int fd)
{
printf("等待中\n");
int tmp=0;
read(fd,&tmp,sizeof(int));
}
void Wake(int fd)
{
int tmp=1;
write(fd,&tmp,sizeof(tmp));
}2).server.cpp
在server读取共享内存的消息之前,先进行等待,当client向共享内存输入了信息(即将tmp输入到管道后),就算是等待到了信息,随后即可读取共享内存的信息,值得注意的是,在读取前后,要打开和关闭管道文件。
代码:
//通信(读)
//server将共享内存当成一个字符串,即将shmaddr当成字符串的首地址
int fd=OpenFifo(FIFONAME,O_RDONLY);
while(true)
{
Wait(fd);
printf("%s\n",shmaddr);
if(strcmp(shmaddr,"quit")==0)
break;
}
CloseFifo(fd);3).client.cpp
在client向共享内存写入了信息之后,提醒server可以读取了(即将管道的内容读到了tmp中),也要注意,写入信息前后别忘了打开和关闭管道文件。
代码:
//通信(写)
//client将共享内存当成一个char类型的缓存区
int fd=OpenFifo(FIFONAME,O_WRONLY);
while(true)
{
cin>>shmaddr;
if(strcmp(shmaddr,"quit")==0)
break;
Wake(fd);
}
CloseFifo(fd);运行:
消息队列
消息队列是一个可以存储消息的缓冲区,它有一个唯一的标识符来区分不同的消息队列。进程可以通过调用消息队列相关的API来创建、发送、接收和删除消息队列。
System V消息队列提供了一些优点,如异步通信、灵活的消息长度、高效的消息传递和顺序保证,使得它成为一种常见的IPC机制。但是,它也存在一些缺点,如消息队列的大小受限于系统内存、没有提供消息确认机制和没有提供消息过期机制。
在Linux系统中,类似共享内存一样,消息队列也可以使用类似函数,比如msgget()、msgsnd()、msgrcv()和msgctl()等函数来操作System V消息队列。
查看消息队列:ipcs -q
删除消息队列:ipcrm -q msqid
信号量
system V信号量是一种用于进程间同步和通信的机制。它是UNIX系统中用于进程间同步和互斥的一种机制,常被用于进程间共享资源的同步和互斥(下面介绍)。
system V信号量由3部分组成:一个计数器,一个等待队列和一些函数。计数器用于记录可用资源数量,等待队列用于保存等待该资源的进程列表,函数用于对信号量进行操作,例如增加、减少、初始化等操作。
当一个进程需要访问共享资源时,它必须先申请信号量。如果信号量的计数器值大于0,那么进程可以使用该资源,并将信号量计数器减1。如果计数器值为0,则表明该资源已经被占用,申请进程将被阻塞,直到该资源被释放。释放资源的进程将会增加信号量计数器的值,同时唤醒等待队列中的一个或多个进程来获取资源。
system V信号量提供了一种可靠的机制来防止多个进程同时访问共享资源。它是一种重要的进程间通信和同步机制,在多进程编程中应用广泛。
查看信号量:ipcs -s
删除信号量:ipcrm -s semid
-
同步与互斥
进程的同步是指在多个进程同时运行的情况下,为了避免出现不合预期的结果而采取的措施。由于各进程要求共享资源,而且有些资源需要互斥使用,因此各进程间竞争使用这些资源,进程的这种关系为进程的互斥。
其中,多个进程(执行流)访问公共的同一份资源,这一份资源称为临界资源;涉及临界资源的代码称为临界区。
注意:
一般地,多个执行流一起运行时互相干扰,主要是因为在不加保护的情况下在临界区访问了临界资源,但在非临界区多个执行流是互不影响的。
-
理解信号量
如同想在电影院看电影,就要先买票一样,进程访问临界资源就要先申请信号量;如同卖掉一张电影票,电影院的座位就少一个一样,一个进程申请信号量成功,信号量计数器就--,就能成功预定想要的资源,当执行完自己的临界区代码(访问完临界资源),信号量就会释放,计数器就会++。
其中买票是对座位的预定,而申请信号量就是对临界资源的预定。
后记
进程间通信的方法很多,涉及到的知识点不是很难,但实操起来是是有一点困难,难的是一些细节的处理,虽然这些并不是目前主流的通信方式,但是都是一些较为经典的、会在面试当中被问到的知识点,希望可以通过此文章了解一部分,有问题的可以在评论中提出哦,拜拜!