【ROS入门】机器人运动控制以及里程计信息显示
文章结构
- 运动控制实现流程(Gazebo)
- 为joint添加传动装置以及控制器
- xacro文件集成
- 启动gazebo并控制机器人运动
- Rviz查看里程计信息
- 启动Rviz
- 添加组件
运动控制实现流程(Gazebo)
运动控制基本流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加传动装置以及控制器
-
将此文件集成进xacro文件
-
启动 Gazebo 并发布 /cmd_vel 消息控制机器人运动
为joint添加传动装置以及控制器
两轮差速配置:
<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 传动实现:用于连接控制器与关节 -->
<xacro:macro name="joint_trans" params="joint_name">
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${joint_name}_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${joint_name}_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- 每一个驱动轮都需要配置传动装置 -->
<xacro:joint_trans joint_name="left_wheel2base_link" />
<xacro:joint_trans joint_name="right_wheel2base_link" />
<!-- 控制器 -->
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel2base_link</leftJoint> <!-- 左轮 -->
<rightJoint>right_wheel2base_link</rightJoint> <!-- 右轮 -->
<wheelSeparation>${base_link_radius * 2}</wheelSeparation> <!-- 车轮间距 -->
<wheelDiameter>${wheel_radius * 2}</wheelDiameter> <!-- 车轮直径 -->
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!-- 运动控制话题 -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic> <!-- 里程计话题 -->
<robotBaseFrame>base_footprint</robotBaseFrame> <!-- 根坐标系 -->
</plugin>
</gazebo>
</robot>
xacro文件集成
<!-- 组合小车底盘与摄像头 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_head.urdf.xacro" />
<xacro:include filename="my_base.urdf.xacro" />
<xacro:include filename="my_camera.urdf.xacro" />
<xacro:include filename="my_laser.urdf.xacro" />
<xacro:include filename="move.urdf.xacro" />
</robot>
启动gazebo并控制机器人运动
<launch>
<!-- 将 Urdf 文件的内容加载到参数服务器 -->
<param name="robot_description" command="$(find xacro)/xacro $(find URDF_Gazebo)/urdf/xacro/car.urdf.xacro" />
<!-- 启动 gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find URDF_Gazebo)/worlds/box_house.world" />
</include>
<!-- 在 gazebo 中显示机器人模型 -->
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
启动 launch 文件,使用 topic list 查看话题列表,会发现多了 /cmd_vel 然后发布 vmd_vel 消息控制即可
使用命令控制(或者可以编写单独的节点控制)
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
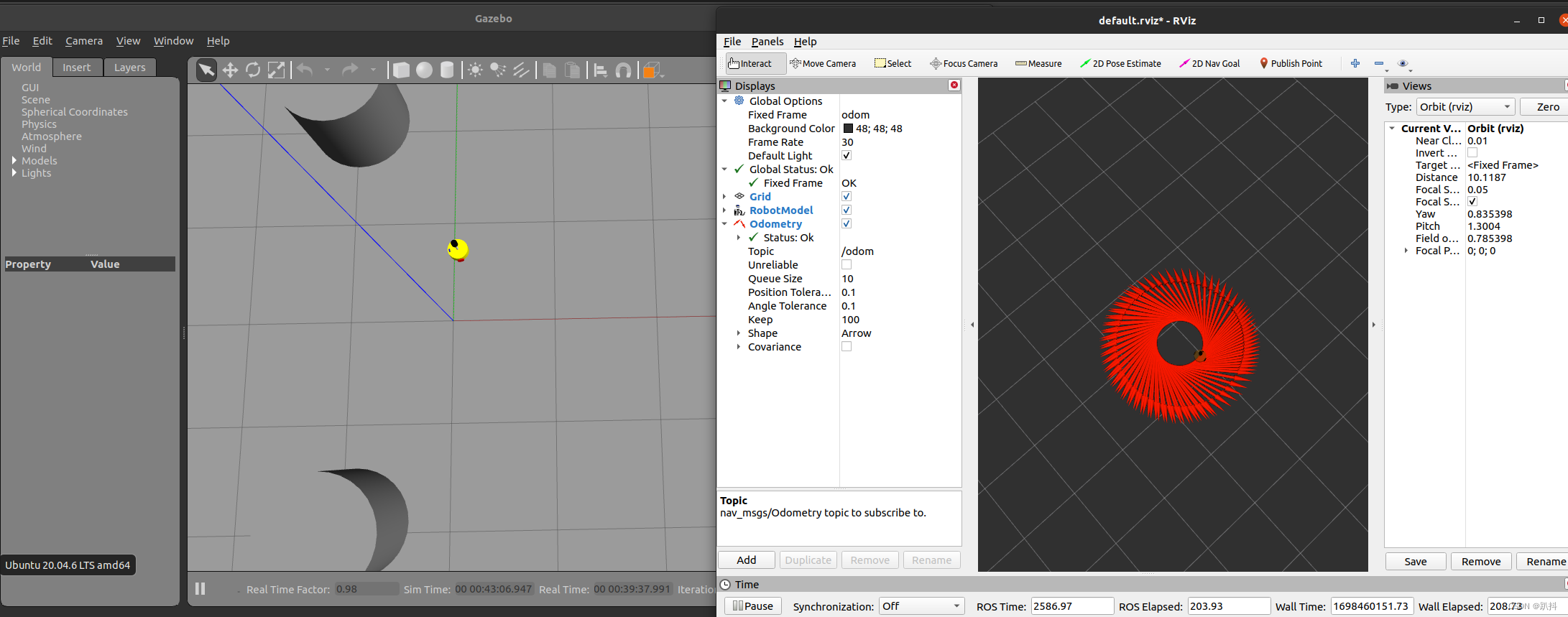
实现效果:
Rviz查看里程计信息
在 Gazebo 的仿真环境中,机器人的里程计信息以及运动朝向等信息是无法获取的,可以通过 Rviz 显示机器人的里程计信息以及运动朝向
里程计: 机器人相对出发点坐标系的位姿状态(X 坐标 Y 坐标 Z坐标以及朝向)。
启动Rviz
launch文件:
<launch>
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
<!-- 关节以及机器人状态发布节点 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
添加组件
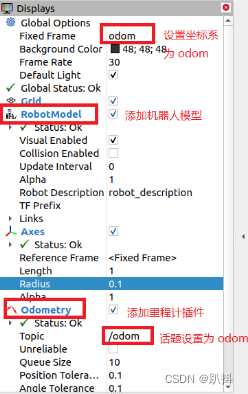
实现效果: