计算线阵相机 到 拍摄产品之间 摆放距离?(隐含条件:保证图像不变形)
一物体被放置在传送带上,转轴的直径为100mm。已知线阵相机4K7u(一行共4096个像素单元,像素单元大小7um),镜头35mm,编码器2000脉冲/圈。保证图像不变形的条件下,计算相机到产品之间 摆放距离?无论传送带速度变化为多少,都不变形。
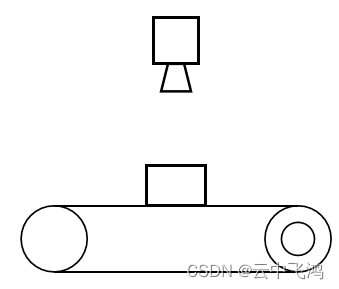
解:编码器安装在转轴中心位置,转轴转动一圈后,同轴的编码器也转动一圈,并发出2000个脉冲,已知转轴直径为100mm,可以得出传送带移动约314.16mm,则在一个脉冲内需扫描约0.1571mm=314.16mm/2000个脉冲。

根据小孔成像原理 + 几何三角形对边成比例:
7um/157.1um = 35mm/x mm;
=》求出,x=785.4mm。
线扫相机放置在离传送带约785.4mm远处时,只要在线扫相机极限行频范围内,无论传送带速度变化为多少,线扫相机始终可以采集到完美不变形的图像。