DIY相机(一)libcamera库
相机选型
DIY相机首先是要确定使用的相机型号。兼容树莓派,画质好一些的,目前主要有两款:一是Raspberry Pi Camera Module 3,二是Raspberry Pi HQ Camera。
下图是Raspberry Pi Camera Module 3的相关特性。支持自动对焦和HDR等特性,视场角为75度,1200万像素。
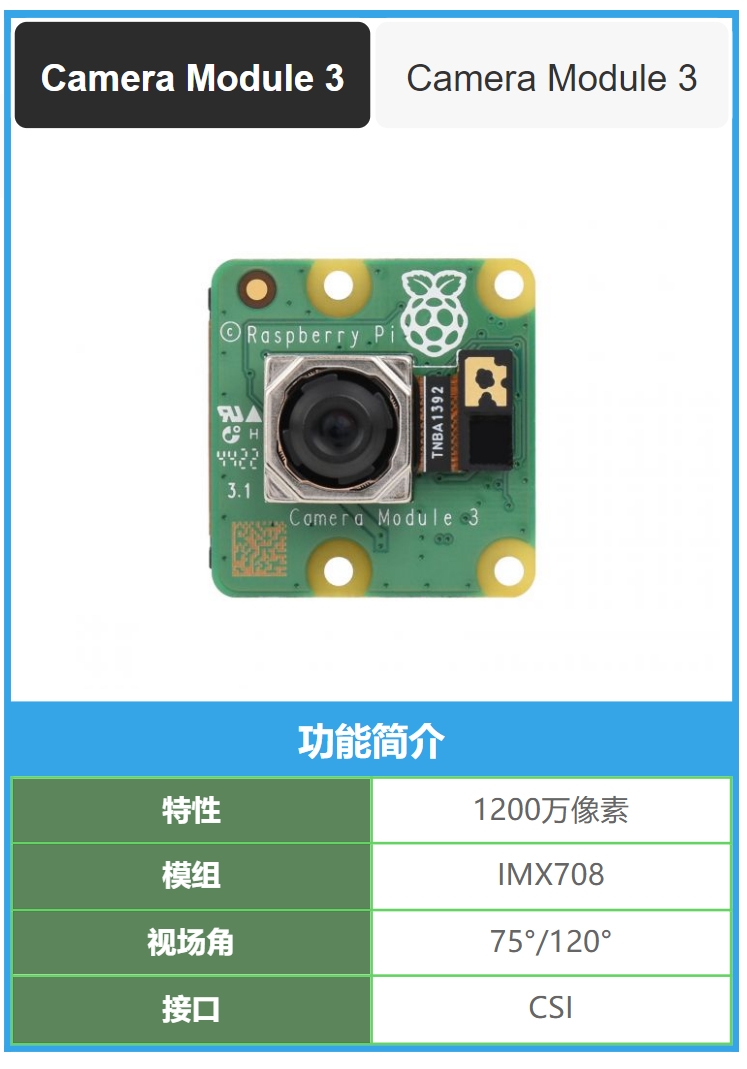
Raspberry Pi Camera Module 3使用的是索尼imx708传感器。此款传感器曾搭载在如OPPO Find X2等旗舰手机上。imx708传感器的参数如下表所示:
| 传感器 | imx708 |
|---|---|
| 分辨率 | 11.9MP |
| 画幅大小 | 1/2.43 (传感器对角尺寸7.4mm) |
| 有效像素数 | 4608(H) × 2592(V) |
| 单个像素大小 | 1.4μm × 1.4μm |
| 接口 | MIPI CSI-2 Interface |
| 快门类型 | 滚动快门 |
| 帧率 | 2304x1296p56, 2304x1296p30, HDR 1536x864p120 |
| 输出格式 | RAW10 |
其中说一下滚动快门。Rolling Shutter(滚动快门)是一种相机传感器工作方式,与其对立的是 Global Shutter(全局快门)。
在 Rolling Shutter 中,相机传感器会逐行地从顶部到底部逐个曝光,就像一个滚动的帘子一样。这意味着在一次曝光过程中,不同行的像素会有微小的时间差。
这种方式在拍摄运动速度较慢或相机固定时通常不会出现问题。然而,当拍摄快速移动的物体或相机本身在移动时,Rolling Shutter 可能会导致图像中出现奇怪的扭曲效果,这被称为“滚动快门效应”。
相比之下,Global Shutter 会在同一时间瞬间曝光整个图像传感器,而不是逐行进行。这意味着在拍摄运动物体或相机移动时,Global Shutter 不会导致扭曲效应,但相机可能会更昂贵,因为实现全局快门技术的传感器通常较复杂。
因此,在选择相机时,要考虑拍摄条件,如果你需要拍摄快速运动的物体,可能需要优先选择支持 Global Shutter 的相机。
第二款Raspberry Pi HQ Camera的优点是CMOS与镜头分离,可以根据需要搭载不同的镜头,比如长焦镜头、变焦镜头等,其使用imx477传感器。这款camera的详细信息等我们用时,再做详细说明。(主要是价格不菲,CMOS+镜头要小1k)。
除了考虑camera,还要考虑与树莓派的兼容性。下表是一个不同传感器与树莓派主板和驱动的对应关系。

从表中可以看到,imx708传感器,只支持libcamera驱动,而不是之前的旧的raspicam驱动。使用libcamera驱动,意味着我们在安装树莓派系统时,对应的Debian version要高于Bullseye,例如我用的就是Debian version: 12 (bookworm)系统。
拍照测试
使用bookworm系统的话,系统安装完成后,libcamera库是直接可以使用的。树莓派也会自动连接camera。但是首先确认/boot/config.txt文件的内容如下面的文件内容所示,尤其是camera_auto_detect=1项。对于树莓派camera module3来说,树莓派是可以自动检测的,不需要我们手动指定dtoverlay,后续我们用树莓派HQ camera的时候,其使用imx477传感器,这时候需要我们手动指定一下dtoverlay的型号。
# For more options and information see
# http://rptl.io/configtxt
# Some settings may impact device functionality. See link above for details
# Uncomment some or all of these to enable the optional hardware interfaces
#dtparam=i2c_arm=on
#dtparam=i2s=on
#dtparam=spi=on
# Enable audio (loads snd_bcm2835)
dtparam=audio=on
# Additional overlays and parameters are documented
# /boot/firmware/overlays/README
# Automatically load overlays for detected cameras
camera_auto_detect=1
# Automatically load overlays for detected DSI displays
display_auto_detect=1
# Automatically load initramfs files, if found
auto_initramfs=1
# Enable DRM VC4 V3D driver
dtoverlay=vc4-kms-v3d
max_framebuffers=2
# Don't have the firmware create an initial video= setting in cmdline.txt.
# Use the kernel's default instead.
disable_fw_kms_setup=1
# Run in 64-bit mode
arm_64bit=1
# Disable compensation for displays with overscan
disable_overscan=1
# Run as fast as firmware / board allows
arm_boost=1
[cm4]
# Enable host mode on the 2711 built-in XHCI USB controller.
# This line should be removed if the legacy DWC2 controller is required
# (e.g. for USB device mode) or if USB support is not required.
otg_mode=1
[all]
然后我们更新下系统
sudo apt update
sudo apt upgrade
预览camera流
直接使用libcamera-hello程序打开摄像头预览
sudo libcamera-hello -t 0
-t表示camera流持续多长时间,0表示一直持续。
拍摄照片
可以使用libcamera-jpeg命令拍摄图片。
libcamera-jpeg -o test.jpg
这个拍摄指令会显示一个5秒左右的预览串口,然后拍摄一张全像素的JPEG图像,保存为test.jpg。
另外,树莓派的libcamera驱动会针对不同的摄像头模块调用一个调谐文件,调谐文件中提供了各种参数,调用摄像头的时候,libcamera会调用调谐文件中的参数,结合算法对图像进行处理最终输出成预览画面。由于libcamera驱动只能自动感光芯片信号,但是摄像头的最终显示效果还会受整个模块的影响,调谐文件的使用就是为了可以灵活处理不同模块的摄像头,调整提高图像质量。
在这里,我们调用系统中提供的针对imx708的调谐文件。
libcamera-jpeg -o test1.jpg --tuning-file /usr/share/libcamera/ipa/rpi/vc4/imx708.json
但是通过使用faststone软件对比,两张图片的成像并没有什么差距。调谐文件同样适用于其他的libcamera指令。
还可以指定出图的分辨率以及预览窗口的预览时间。-t 2000指2s的预览时间。
libcamera-jpeg -o test.jpg -t 2000 --width 640 --height 480
曝光补偿和曝光增益
树莓派的AEC/AGX算法允许程序指定曝光补偿,也就是通过设置EV数值来调整图像的亮度。比如:
libcamera-jpeg --ev -0.5 -o darker.jpg
libcamera-jpeg --ev 0 -o normal.jpg
libcamera-jpeg --ev 0.5 -o brighter.jpg
我们对如下的名词进行解释:
AEC(Automatic Exposure Control)和 AGX(Automatic Gain Control)是图像处理中常用的两种自动控制算法,它们通常用于相机或摄像机系统中,以调整图像的曝光和增益,以确保在不同光照条件下获得合适的图像质量。
- AEC(自动曝光控制):AEC 算法通过调整快门速度(曝光时间)来控制图像的亮度。在低光条件下,它会增加曝光时间以提高亮度,而在高光条件下,它会减少曝光时间以避免图像过曝。
- AGX(自动增益控制):AGX 算法通过调整图像的放大倍数来控制亮度。它可以在光线较暗的情况下增加图像信号的放大程度,以提高亮度。
EV代表曝光值(Exposure Value),它是一个相机设置,用于调整照片的曝光水平。EV值的变化会影响相机的快门速度、光圈和ISO等参数,从而改变照片的亮度和细节。
EV值是一个以对数形式表示的指标,通常以“EV +/- 数值”表示,例如+1 EV 或 -2 EV。EV值的变化一般以1/3或1/2 EV为单位进行调整。
正的EV值表示相机会增加曝光,使图像变亮。负的EV值表示相机会减少曝光,使图像变暗。
曝光补偿常用于情况复杂、光照条件变化或拍摄者希望在相机自动设置之外进行调整的情况。例如,在拍摄对比度很高的场景时,你可能会使用曝光补偿来避免过曝或欠曝的情况。
我们上面3张照片通过调整EV值来实现不同的曝光等级。下表是上面3张图片的exif信息。
| 照片 | 快门 | ISO |
|---|---|---|
| normal.jpg | 0.025s(1/40) | 112 |
| brighter.jpg | 0.030s(1/33) | 130 |
| darker.jpg | 0.017s(1/57) | 112 |
通过这3张照片的快门和ISO数据,可以看到我们通过调整EV值获得的不同曝光程度的照片,是通过调整快门和ISO数据得到的。
我们再来看一下libcamera通过控制增益来实现不同亮度的图片的。
libcamera-jpeg -o normal.jpg -t 2000 --shutter 25000 --gain 0
libcamera-jpeg -o brighter.jpg -t 2000 --shutter 25000 --gain -1
libcamera-jpeg -o darker.jpg -t 2000 --shutter 25000 --gain 1
我们通过--gain参数控制曝光增益,使用--shutter将快门时间固定在25ms。
| 照片名 | 图片 | ISO |
|---|---|---|
| brighter.jpg |  | 1600 |
| normal.jpg |  | 205 |
| darker.jpg |  | 112 |
树莓派的camera module 3设想模组,光圈大小是不可调节的,快门速度我们也固定为了25ms,目前只有ISO是可调节的。可见--gain参数也是通过控制ISO的值来得到不同曝光水平的照片的。
libcamera-still,更多的出图控制策略
可以像libcamera-jpeg一样,使用
libcamera-still -o test.jpg
得到一张图片。与libcamera-jpeg得到的图片基本一致,图片占用的存储空间也一致。
libcamera-still可以通过-e参数指定不同的编码器,实现不同的格式保存。可以支持png和bmp编码,也支持直接不带编码或者任何图像格式地将RGB或者YUV像素的二进制转储保存成文件。如果是直接保存RGB或者YUV数据,程序在读取此类文件的时候必须了解文件的像素排列方式。
libcamera-still -e png -o test.png
libcamera-still -e bmp -o test.bmp
libcamera-still -e rgb -o test.data
libcamera-still -e yuv420 -o test_yuv.data
png和jpg是两种常用的格式,这里介绍一下他们的区别:
PNG(Portable Network Graphics)和JPEG(Joint Photographic Experts Group)是两种常见的图像文件格式,它们在某些方面有着明显的区别。
- 压缩算法:
- PNG使用无损压缩算法,保留了所有图像细节,不会损失图像质量。这使得PNG格式适用于需要保留高质量细节的场景,比如图形设计、线条图像等。
- JPEG使用有损压缩算法,通过消除图像中的一些细节和色彩信息来减小文件大小,从而降低了图像质量。这使得JPEG适用于照片等需要较小文件大小的情况。
- 颜色深度:
- PNG 支持索引色、灰度、RGB和RGBA等多种颜色模式,同时支持16位和8位深度的颜色,适用于各种色彩丰富的图像。
- JPEG 主要用于保存照片,通常以8位RGB模式存储。
- 透明度:
- PNG 支持完全透明和半透明,能够在图像中创建复杂的透明效果,适用于图形设计等需要透明背景的场景。
- JPEG 不支持透明度,它只能显示实色背景。
- 文件大小:
- JPEG 文件通常比同样分辨率和质量的PNG文件小得多,因为它是有损压缩的,可以在一定程度上减小文件大小。
- PNG 文件相对较大,因为它是无损压缩的,会保留所有的图像细节。
- 适用场景:
- PNG 适用于需要保留高质量细节、有透明度要求或者需要无损压缩的图像,比如图形设计、图标、线条图像等。
- JPEG 适用于照片和其他需要较小文件大小的场景。
综上所述,选择使用PNG还是JPEG取决于图像的具体用途和要求。如果需要保留高质量细节、支持透明度或者需要无损压缩,那么PNG是一个更好的选择。如果主要是保存照片或者需要较小的文件大小,那么JPEG可能更适合。
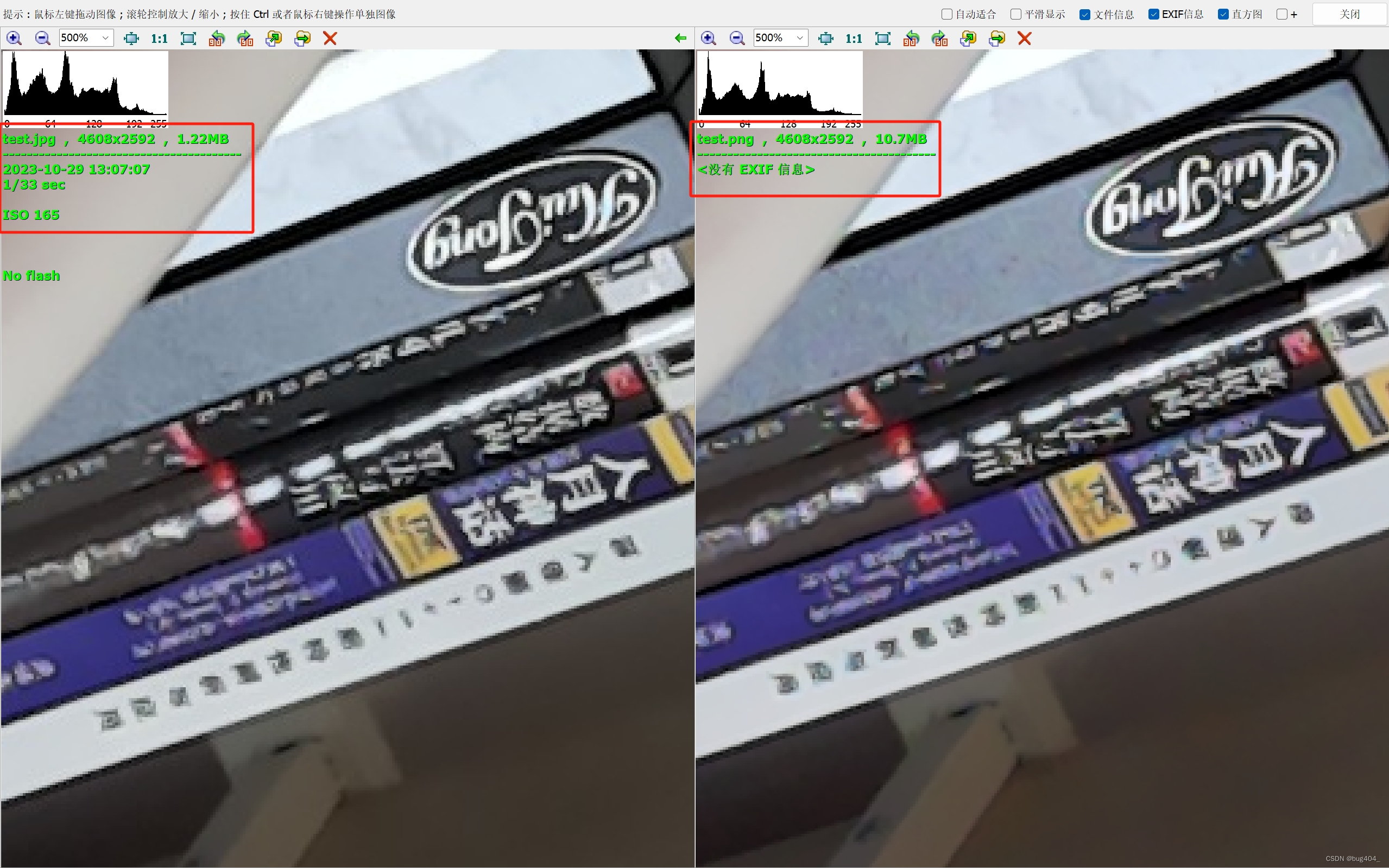
可以看到,jpg文件的大小是1.2M,但是png文件的大小就到了10.7M。但是从对比图看,png相比jpg,没有明显的画质优势。
输出RAW图
原始图像(Raw image)就是直接图像传感器输出的图像, 没有经过任何ISP或者CPU处理。在摄影后期中,在摄影的后期中,使用后期尤其重要,有以下的原因:
使用RAW格式图像相比JPEG格式具有一些优点,尤其是在后期处理方面:
-
更高的动态范围:RAW图像包含了相机传感器捕捉到的原始数据,因此它们通常具有比JPEG更高的动态范围。这意味着在后期处理中你可以更好地调整高光和阴影部分,以保留更多细节。
-
更多的色彩深度:RAW图像通常以更高的色彩深度(比如14位或16位)存储,相比之下,JPEG通常是8位。这使得你在后期处理时可以更精细地调整颜色和色调。
-
更大的灵活性:由于RAW图像未经压缩或经过少量压缩,因此你可以在后期处理时进行更大范围的调整,例如白平衡、曝光、对比度等。
-
无损压缩:RAW图像通常使用无损压缩,这意味着图像不会失去任何细节或质量,即使你进行了多次保存。
-
避免了摄影机的内部处理:JPEG图像通常会经过相机内部的处理,包括锐化、噪声降低等。使用RAW图像可以避免这些内部处理,使你在后期处理时能够更好地控制图像的外观。
-
更好的白平衡控制:RAW图像允许你在后期处理时更精确地调整白平衡,而JPEG通常会锁定一种白平衡。
然而,使用RAW格式也有一些缺点:
-
文件大小:RAW文件通常比JPEG文件大,因为它们包含了未经压缩的原始数据。
-
需要后期处理:与JPEG相比,RAW图像通常需要更多的后期处理工作,因为它们没有经过相机内部的自动处理。
-
需要专门的软件:通常需要专门的软件(如Adobe Camera Raw、Lightroom等)来处理RAW格式图像。
-
更大的存储需求:由于RAW文件通常较大,你可能需要更大的存储空间来保存这些文件。
综上所述,如果你在摄影中注重后期处理的灵活性和控制能力,使用RAW格式可能是个不错的选择。然而,如果你只是想快速拍摄和分享照片,JPEG格式可能更为便捷。
对于彩色相机传感器,一般来说原始图像的输出格式是Bayer. 注意原始图和我们之前说的位编码的RGB和YUV图像不同,RGB和YUV也是经过ISP处理后的图像的。
拍摄一张原始图像的指令:
libcamera-still -r -o test.jpg
原始图像一般是以DNG (Adobe digital Negative) 格式保存的,DNG格式可以兼容大部分标准程序, 比如dcraw、RawTherapee或者HoneyView. 原始图像会被保存为.dng后缀的相同名字的文件,比如如果运行上面的指令,为被另存为test.dng, 并同时生成一张jpeg文件。DNG文件中包含了已图像获取有关的元数据, 比如白平衡数据,ISP颜色矩阵等, 下面是用exiftool工具显示的元数据编码信息:
---- ExifTool ----
ExifTool Version Number : 12.69
---- File ----
File Name : test.dng
Directory : .
File Size : 24 MB
File Modification Date/Time : 2023:10:29 17:18:03+08:00
File Access Date/Time : 2023:10:29 17:18:03+08:00
File Creation Date/Time : 2023:10:29 17:18:03+08:00
File Permissions : -rw-rw-rw-
File Type : DNG
File Type Extension : dng
MIME Type : image/x-adobe-dng
Exif Byte Order : Little-endian (Intel, II)
---- EXIF ----
Subfile Type : Reduced-resolution image
Image Width : 288
Image Height : 162
Bits Per Sample : 8 8 8
Compression : Uncompressed
Photometric Interpretation : RGB
Make : Raspberry Pi
Camera Model Name : imx708
Strip Offsets : 8
Orientation : Horizontal (normal)
Samples Per Pixel : 3
Strip Byte Counts : 139968
Planar Configuration : Chunky
Software : libcamera-still
Subfile Type : Full-resolution image
Image Width : 4608
Image Height : 2592
Bits Per Sample : 16
Compression : Uncompressed
Photometric Interpretation : Color Filter Array
Strip Offsets : 140624
Samples Per Pixel : 1
Strip Byte Counts : 23887872
Planar Configuration : Chunky
CFA Repeat Pattern Dim : 2 2
CFA Pattern 2 : 2 1 1 0
Black Level Repeat Dim : 2 2
Black Level : 64 64 64 64
White Level : 1023
Compression : Uncompressed
Strip Offsets : 0
Strip Byte Counts : 0
Exposure Time : 1/16
ISO : 400
Date/Time Original : 2023:10:29 17:18:03
Subject Distance : 0.8847590685 m
DNG Version : 1.1.0.0
DNG Backward Version : 1.0.0.0
Unique Camera Model : Raspberry Pi imx708
Color Matrix 1 : 0.9413505197 -0.32803303 -0.09434454143 -0.2564420402 1.072353721 0.1573984027 -0.02698263898 0.1290469915 0.4360769093
As Shot Neutral : 0.4639694691 1 0.5782194734
Calibration Illuminant 1 : D65
---- Composite ----
CFA Pattern : [Blue,Green][Green,Red]
Image Size : 4608x2592
Megapixels : 11.9
Shutter Speed : 1/16
这是关于一个名为 test.dng 的图像文件的 Exif 信息的提取结果。Exif 信息包含了许多有关照片的详细元数据。
以下是对一些关键信息的解释:
-
ExifTool版本信息:
- ExifTool 版本号:12.69
-
文件信息:
- 文件名:test.dng
- 文件大小:24 MB
- 文件修改日期:2023年10月29日 17:18:03 (UTC+8)
- 文件访问日期:2023年10月29日 17:18:03 (UTC+8)
- 文件创建日期:2023年10月29日 17:18:03 (UTC+8)
- 文件权限:-rw-rw-rw-
- 文件类型:DNG (数字负片格式)
- MIME类型:image/x-adobe-dng
- Exif字节顺序:小端序 (Intel, II)
-
EXIF信息:
-
Full-resolution image (全分辨率图像):
- 图像宽度:4608 像素
- 图像高度:2592 像素
- 每样本位数:16 位
- 压缩:未压缩
- 光度解释:彩色滤波阵列 (Color Filter Array)
- 曝光时间:1/16 秒
- ISO:400
- 拍摄时间:2023年10月29日 17:18:03
- 主体距离:0.8847590685 米
- DNG版本:1.1.0.0
- 相机型号:Raspberry Pi imx708
-
Reduced-resolution image (降低分辨率图像):
- 图像宽度:288 像素
- 图像高度:162 像素
- 每样本位数:8 位
- 压缩:未压缩
- 光度解释:RGB
- 相机制造商:Raspberry Pi
- 相机型号:imx708
-
…
(还有许多其他的Exif信息,比如色彩校正矩阵、曝光设置等等)
-
-
Composite信息:
- CFA模式(Color Filter Array):[蓝色,绿色][绿色,红色]
- 图像尺寸:4608x2592 像素
- 百万像素:11.9 MP (百万像素)
这份Exif信息提供了关于该图像的详尽信息,包括拍摄设备、拍摄条件、图像分辨率等等。
超长曝光
超长曝光一般用在我们拍摄流光快门的场景,通过长曝光,将一段时间内的景象变化都记录下来。例如下面的场景,就是通过30s长曝光实现的。
 |  |
|---|
但是在我们使用的树莓派camera module3中,超长曝光是没太有用处的。包括在没有可变光圈的手机专业模式中,设置超长曝光也不会有流光快门的效果。因为想要得到流光快门的效果,不仅要快门设置的够长,光圈还要设置的特别小,甚至还要加上ND1000、ND64这样的减光镜,以及ISO调到最小,才能实现一张流光快门的效果。
这里简单说一下曝光三要素:
曝光三要素是指在摄影中控制照片曝光的三个关键因素,它们分别是:
- 光圈(Aperture):
- 光圈是指相机镜头的光圈大小。它用一个数字表示,称为光圈值(f)。
- 光圈值越小,光圈越大,相机能够接收到更多光线,照片会更亮。
- 光圈值越大,光圈越小,相机接收到的光线更少,照片会更暗。
- 光圈还会影响景深,较大的光圈(小光圈值)会产生较大的背景虚化效果。
- 快门速度(Shutter Speed):
- 快门速度是指相机传感器或胶片暴露于光线的时间长短。
- 快门速度越快,相机接收到的光线时间越短,照片会变得暗淡,但可以冻结运动。
- 快门速度越慢,相机接收到的光线时间越长,照片会更亮,但可能会导致运动模糊。
- ISO感光度:
- ISO值代表了相机传感器对光的敏感程度。较高的ISO值意味着相机在相同光线条件下可以使用更快的快门速度,但也可能会引入图像噪点。
- 较低的ISO值会减少噪点,但可能需要更慢的快门速度或更大的光圈来保持曝光正常。
这三个要素相互影响,称为"曝光三角"。调整其中一个参数会影响到其他两个。例如,如果你增加了光圈值(缩小光圈),你可以选择更快的快门速度来保持相同的曝光,或者降低ISO以减少噪点。
理解和掌握这些曝光三要素,可以让你更好地控制照片的曝光水平,从而拍摄出更令人满意的照片。
我们在使用微单或单反拍照时,有经验的摄影师也都会使用M档(手动挡)进行拍摄,这时候就需要根据场景去采用合适的光圈、快门和ISO大小。比如在拍摄球类运动时,由于球的运动速度很快,为了保证排出的照片不模糊,需要用较高的快门速度,例如1/400s的快门速度,使用最大光圈,保证给足够的进光量,例如使用F1.8的大光圈。这时候为了保证曝光水平的正常,可以让机器来决定ISO的数值,也可以自己指定ISO的数值。
如果使用微单或单反拍摄流光快门的效果,常用的参数配置是:快门30s,光圈F16或镜头支持的最小光圈,ISO机器支持的最低,添加ND1000或ND64减光镜。
使用手机拍摄流光快门效果时,其实不是像单反那样纯光学成像的效果,而是算法计算的结果。
因此,等同于手机,使用树莓派camera module 3时,由于光圈大小不可变,就算开启了超长曝光,也是实现不了流光快门的,因为光圈大小太大的话,曝光时间太长,就会导致进光量过大,照片会过曝,因此需要后期使用算法实现流光快门的效果。
我们在这里先介绍下libcamera长曝光的API。
如果要拍摄一张超长曝光的图片,我们需要禁用AEC/AGC和白平衡,否则这些算法会导致图片在收敛的时候多等待很多帧数据。禁用这些算法需要另设置显式值,另外, 用户可以通过–immediate设置来跳过预览过程。
libcamera-still -o long_exposure.jpg --shutter 100000000 --gain 1 --awbgains 1,1 --immediate

毫无疑问,这是一张过曝的照片。
备注:几款官方摄像头的最长曝光时间参考表格.
| 模块 | 最长曝光时间(s) |
|---|---|
| camera module V1(OV5647) | 6 |
| camera module V2(IMX219) | 11.76 |
| camera module V3(IMX708) | 112 |
| HQ(IMX477) | 670 |
总结
本篇主要说明了我们使用树莓派diy一个相机时,涉及到的相机选型和底层库libcamera的相关基础使用。
libcamera提供的功能远不止此,我们使用单反/微单的M档拍摄时,可以设置的全部参数,都可以通过libcamera库去设置。
但是libcamera只是在终端中使用的指令,我们制作一个相机,需要有自己的相机app和图库app等,这就需要我们在上层语言上进行调用。下一节我们会介绍对libcamera进行封装的picamera2库。