软件临界资源访问冲突
1. 基础概念
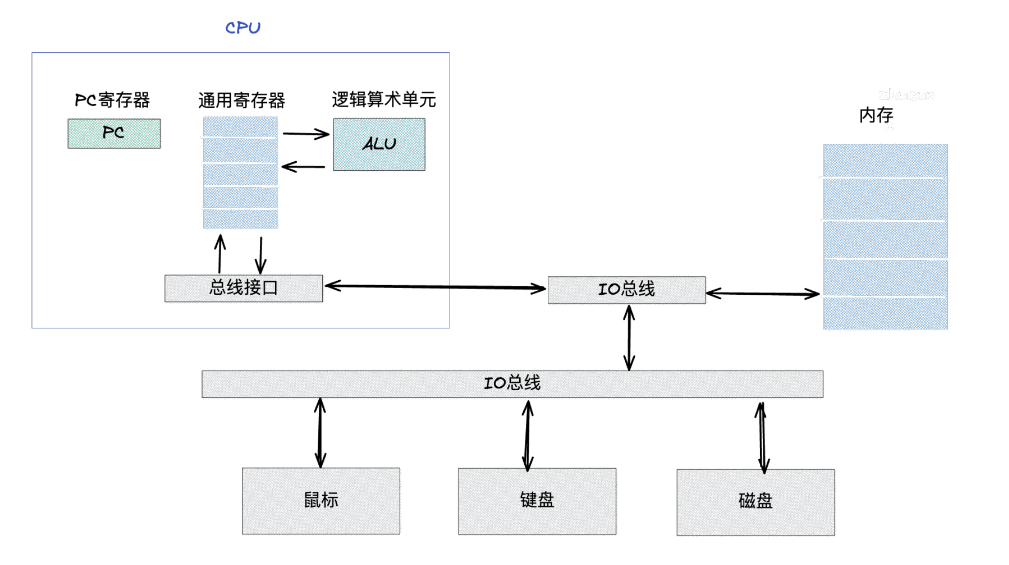
1.1 cpu执行汇编代码
处理指令的步骤主要包括以下几步动作:
1.提取(Fetch)指令。
2.解码(Decode)指令。
3.执行(Execute)指令。
cpu运行一条汇编需要执行三个步骤,按照顺序依次执行。异常触发中断需要等待一条汇编运行完成才能跳转,这是cpu内部硬件状态机运行决定的机制。所以汇编的运行是原子性的。
1.2 编译器—c语言转汇编
举个例子:有一个变量被定义在RAM的栈的一个内存中,运行如下代码
i |= 0x01
转为汇编语言如下
LOAD R1,[#i] ; Read a value from i into R1
MOVE R2,#0x01 ; Move the absolute constant 1 into R2
OR R1,R2 ; Bitwise OR R1 (i) with R2 (constant 1)
STORE R1 ; Store the new value back to i
load指令用于将数据从内存中读取到CPU内部寄存器中,
store指令用于将数据从CPU内部寄存器中写入到内存中。
cpu运行一条c语言被分解成多条汇编语言。异常触发中断会等待一条汇编运行完成触发跳转,但不会等待一条c语言全部运行完成触发跳转,所以c语言的运行是非原子性的。
1.3 原子性与非原子性
一个操作是不可分割的、完整的被执行的是原子性执行。要么全部执行成功,要么全部不执行,不存在执行一半的情况。
2. 顺序执行—裸机编程—单线程
在没有中断触发的程序中,程序是顺序执行的,裸机编程可以将非原子性操纵的c语言看做原子性的操作。解决了非原子性程序的未知因素,提高代码的健壮性。单线程也解决了各种冲突问题。
2.1 裸机编程的场景
1 cpu的速度比较低
2 内存的容量比较小
3 功能比较简单
2.2 裸机编程的多线程
低配的mcu同样可以实现多线程,只不过是采用基准时间的切片状态机法,将大的任务分解成无数个小任务,小任务运行完成后让出cpu,其他任务运行,每个任务占用的cpu时间比较少,实现微观上的并行。此方法不适用于裸机复杂的控制任务,分拆比较耗时,并且分拆后的代码不好阅读与维护。
3. 跳转执行—前后台系统—多线程
CPU与外设进行数据交换时,存在高速CPU与慢速外设的矛盾。
虽然裸机的轮询能满足大部分的要求,但也在查询及等待过程中降低了CPU的工作效率,并且当一个任务比较复杂,会占用cpu更多的时间,任务的实时性会受到影响。
化主动为被动,避免 CPU 轮询等待某条件成立,提高实时性。
有了中断功能,外设随时向CPU发出中断请求,要求CPU及时处理,CPU就可以马上响应(若中断响应条件满足)加以处理。这样的及时处理在查询方式下是做不到的,从而大大减少了CPU的等待时间。
当发生一个中断请求时,CPU会立即中止当前任务,压入当前任务状态到堆栈中,然后执行中断服务程序。中断服务程序完成之后,CPU将原来的执行任务状态从堆栈中恢复并继续原任务的执行。在这个过程中,CPU保存了现场信息(CPU内部寄存器压栈pc lr etc…)以便恢复。
加入中断机制。程序执行将是非原子性的。代码的健壮性受到影响。
3.1 全局变量的临界区与互斥
举个例子:
int flag = 1;
int mian()
{
while(1)
{
if(flag == 1)
{
flag = 0;
//todo
flag = 1;
}
}
}
void irq()
{
if(flag == 1)
{
flag = 0;
//todo
flag = 1;
}
}
在上面的例子中,flag等于1时,执行对应内部的函数。大多数情况下没有问题。
特殊情况:程序在判断flag==1时,条件成立,欲将flag = 0,触发中断,中断判断flag也为1,也进入执行对应的函数。
如果todo需要使用同一外设,比如都需要往oled屏幕上写数据,则会有一个任务无法被正常运行。出现这种情况也是概率问题。
3.2 可重入函数的临界区与互斥
手写队列驱动,调用同一个函数。
uint16_t S_QueueDataIn(uint16_t *front, uint16_t *tail, uint16_t *length, uint8_t data[], uint16_t Queue_Size, uint8_t *value)
{
if (*length > 0 && *front == *tail) {
return 0;
}
*length += 1;
data[*tail] = *value;
*tail = (*tail + 1) & (Queue_Size - 1);
return 1;
}
uint16_t S_QueueDataOut(uint16_t *front, uint16_t *tail, uint16_t *length, uint8_t data[], uint16_t Queue_Size, uint8_t *value)
{
if (*length){
__disable_irq(); //禁止CPU去响应中断,没有真正的去屏蔽中断的触发
*length -= 1;
*value = data[*front];
*front = (*front + 1) & (Queue_Size - 1);
__enable_irq(); //打开中断
return 1;
}
return 0;
}
在串口中断中,使用队列入队接收数据,在主循环中队列出队的方式获取、解析、运行是shell的标准做法。
函数在出队列时进入中断入队,*length临界值非原子性操作,则会出现丢包或者数组越界段错误的情况,这也是非原子性操作的另一个弊端。
etc…
4. 临界区的保护
在上面两个例子中,flag与*length都属于临界资源,临界资源的赋值属于临界区。
第一种:屏蔽中断的方式。原子性操作
第二种:互斥锁,依赖硬件的原子性操作。
第三种:避免临界区的出现。
5. 操作系统 FreeRTOS
FreeRTOS(Free Real-Time Operating System)是一个开源的实时操作系统(RTOS)。
为什么使用FreeRTOS?
裸机编程和前后台编程都没有解决一个问题,多个复杂功能运行的delay死等问题。
不使用delay,代码会被拆开,完整性和拓展性受到很大影响。
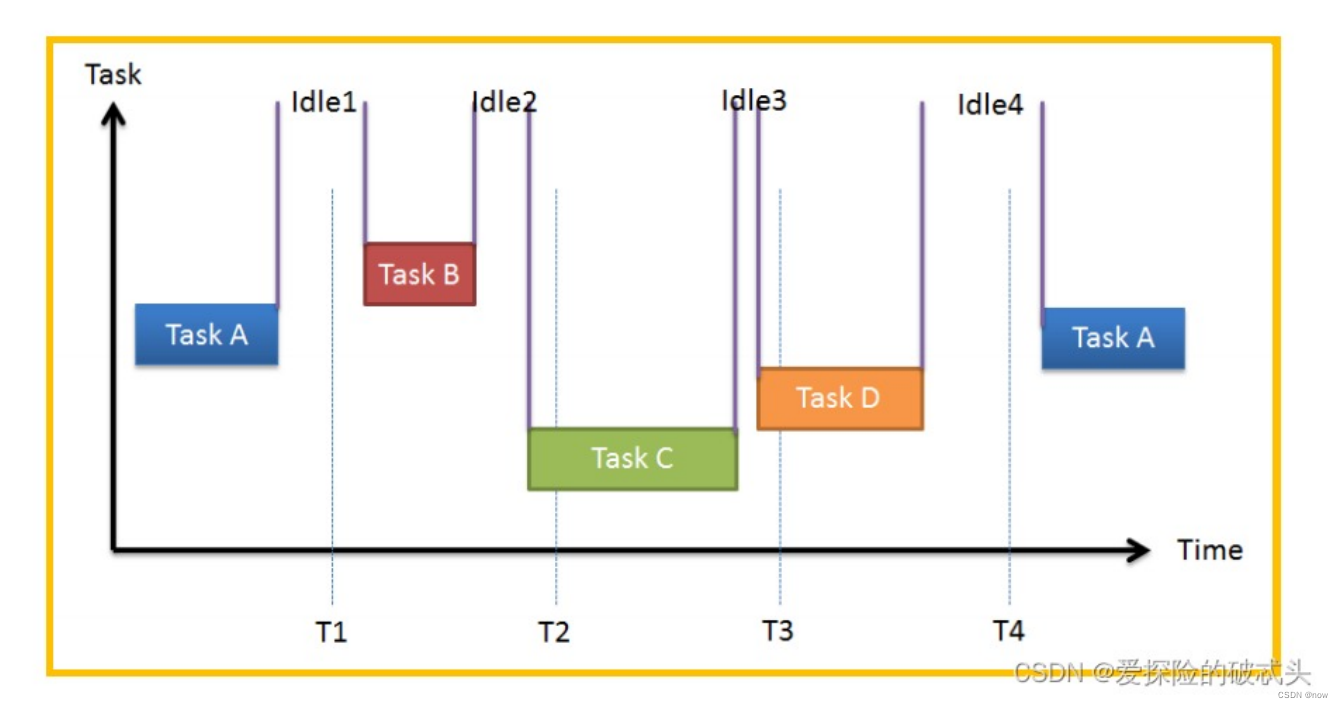
严格来说,freeRTOS并不是实时操作系统,因为它是分时复用的。
系统将时间分割成很多时间片,然后轮流执行各个任务。
每个任务都是独立运行的,互补影响,由于切换的频率很快,就感觉像是同时运行的一样。
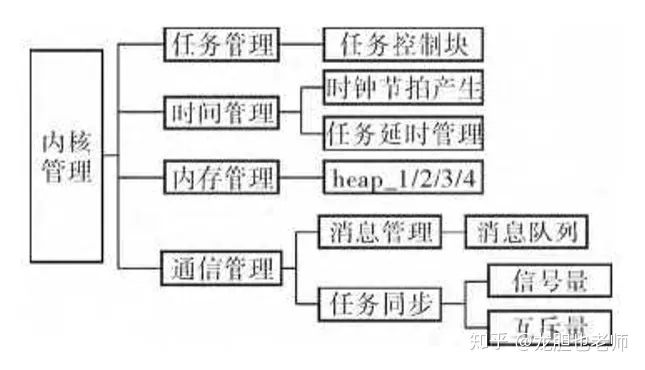
5.1 内核功能主要包括:
5.2 FreeRTOS 进程管理
在FreeRTOS中,根据功能的不同,把整个系统分割成一个个独立且无限循环、无法返回的函数,这个函数就称为 进程。也就是多个裸机。
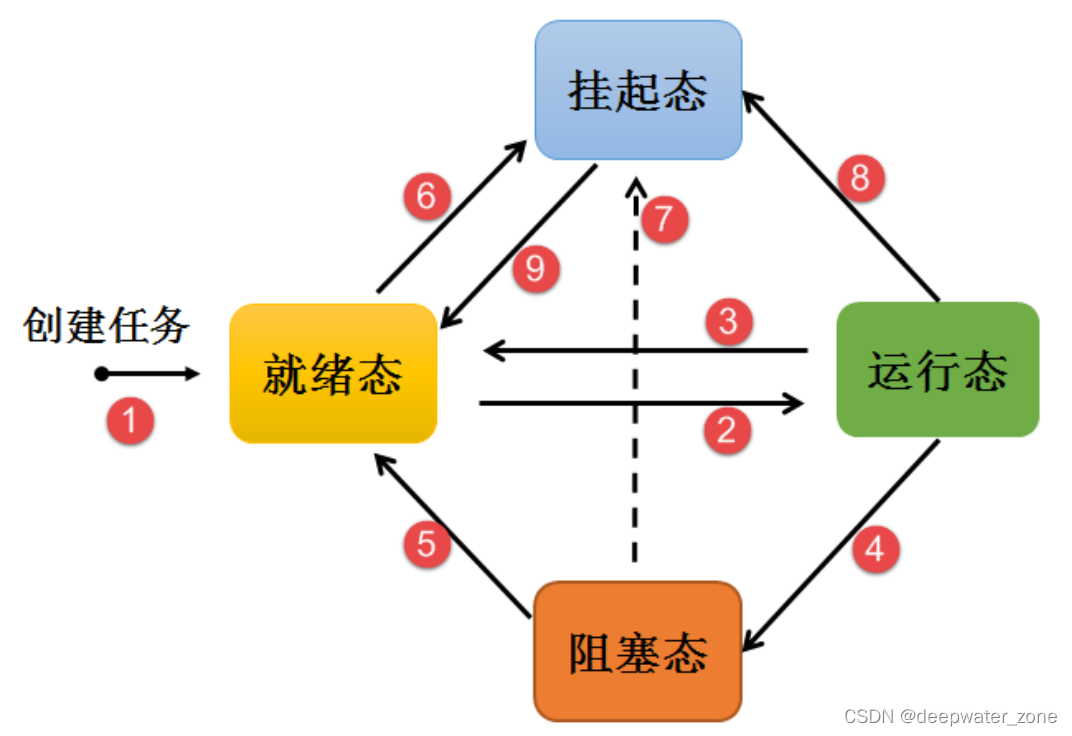
5.2.1 进程的状态
5.2.2 进程创建
主要考虑任务的入口,任务的优先级,任务的栈大小。
5.2.3 进程基础api—不含ISR
1 创建任务 xTaskCreate()
2 启动任务 vTaskStartScheduler()
3 挂起任务 vTaskSuspend()
4 恢复任务 vTaskResume()
5 删除任务 vTaskDelete()
6 阻塞延时 vTaskDelay()
7 绝对延时 vTaskDelayUntil()
5.2.4 任务的挂起与恢复
挂起:挂起任务类似于暂停,可恢复;删除任务,无法恢复。
恢复:恢复被挂起的任务。