激光雷达毫米波雷达
一.激光雷达
技术指标:
视场角
线数(32/64/128)
分辨率(激光光束夹角越小分辨率越高,0.1度)
探测距离:0.3-200m
反射率(一般探测10%以上反射率的目标)
分类
-
按照测距方法分类:
1)ToF法
2)FMCW法(Frequency-Modulated Continuous-Wave)
FMCW雷达系统所用信号的频率随时间变化呈线性升高。
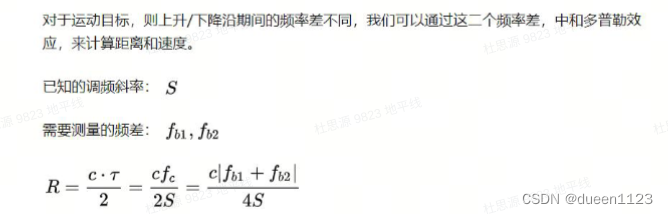
通过发射接受信号的频率差,计算目标距离和速度 -
按照扫描方式分类:
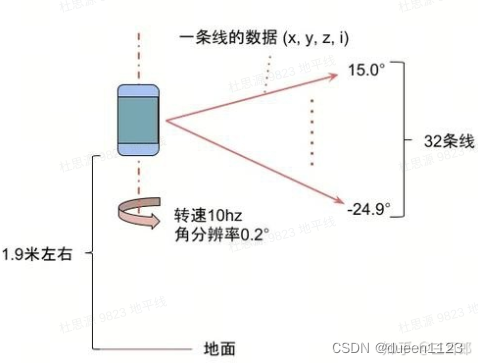
1)机械旋转式
扫描频率/帧率:是转速的意思,10Hz就是1s转10圈
角分辨率:点云图像中相邻两个点之间的夹角(应该是同一个激光束扫描得到的)
采样率:激光雷达每秒进行有效采集的此书,也就是1s内产生的点云数量
Lidar采样率一定,因此帧率越高,角分辨率越低;反之帧率越低,角分辨率越高
2)MEMS混合固态激光雷达
可以动态调整自己的扫描模式,以此来聚焦特殊物体
3)固态激光雷达
二.毫米波雷达
基础知识参考:毫米波雷达传感器基础知识
(1)多普勒频移
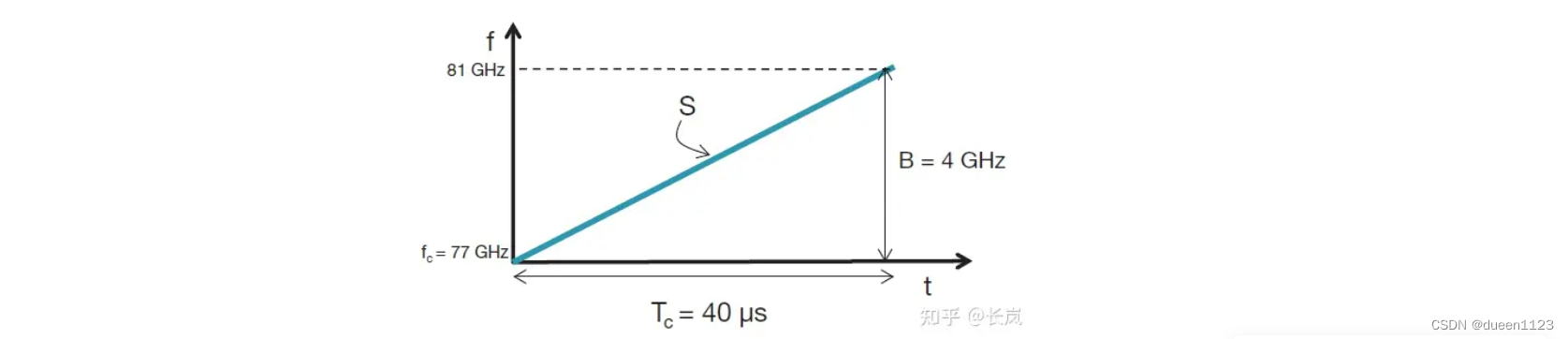
(2)调频斜率S
频率随时间呈线性变换,如下图,调频周期40us,调制带宽4GHz,该线性调频脉冲具有起始频率 (fc)、带宽(B) 和持续时间 (Tc),该线性调频脉冲的斜率 (S) 捕捉频率的变化率。
(2)雷达测距
中频信号IF为TX发射信号和RX接受信号合并在一起的信号
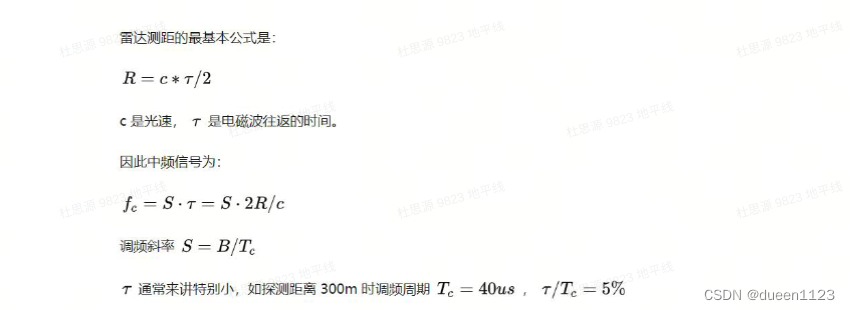
1.距离估计
通过测量频移来得到飞行时间,进而得到飞行距离
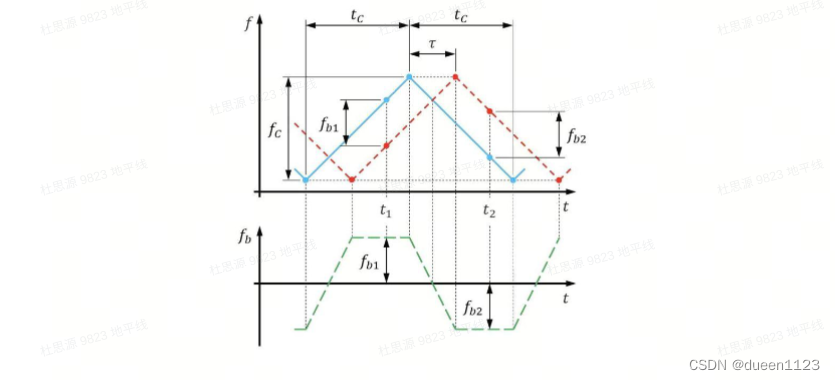
如下图,蓝色是发射信号频率,红色是接收信号频率,tao为信号发射到接收需要的时间
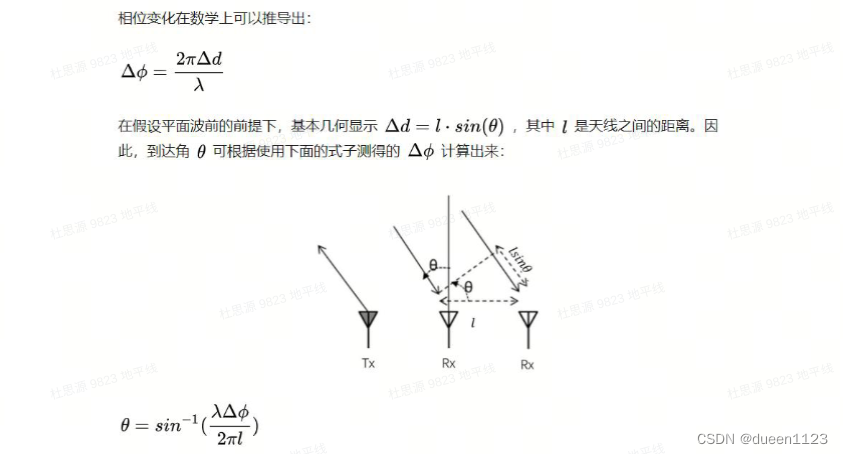
2.角度估计
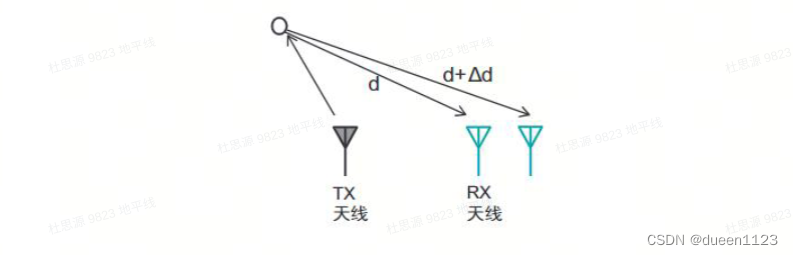
相位变化原理解释如下:
相位变化与光走过的距离的关系:光每走过一个波长的距离,相位会变化2π