树莓派多串口通信
树莓派多串口通信
- 串口配置
- 串口通信函数分析
- 串口通信示例代码
- 参考博文1:树莓派 4 UART 多串口配置通信
- 参考博文2:树莓派wiringPi库详解
- 关于树莓派相关其他环境配置可参考:快速上手树莓派
- 关于wiringPi库初始化与IO口开发可参考:树莓派外设开发-GPIO口
考虑到SSH网络时常出现小问题,因此本人将树莓派串口1(ttyAMA0)主要用于树莓派串口登陆备份,本文主要对串口2-串口5进行配置开发,同时也会涉及对串口1通信的配置。
串口配置
配置开启串口 UART2-5
执行编辑 config.txt 命令:
sudo nano /boot/config.txt
在文件结尾添加如下:
dtoverlay=uart2
dtoverlay=uart3
dtoverlay=uart4
dtoverlay=uart5
保存(Ctrl + o)并退出(Ctrl + x)
重启(sudo reboot)后查看是否生效:
ls /dev/ttyAMA*
结果显示如下:
pi@raspberrypi:~ $ ls /dev/ttyAMA*
/dev/ttyAMA0 /dev/ttyAMA1 /dev/ttyAMA2 /dev/ttyAMA3 /dev/ttyAMA4
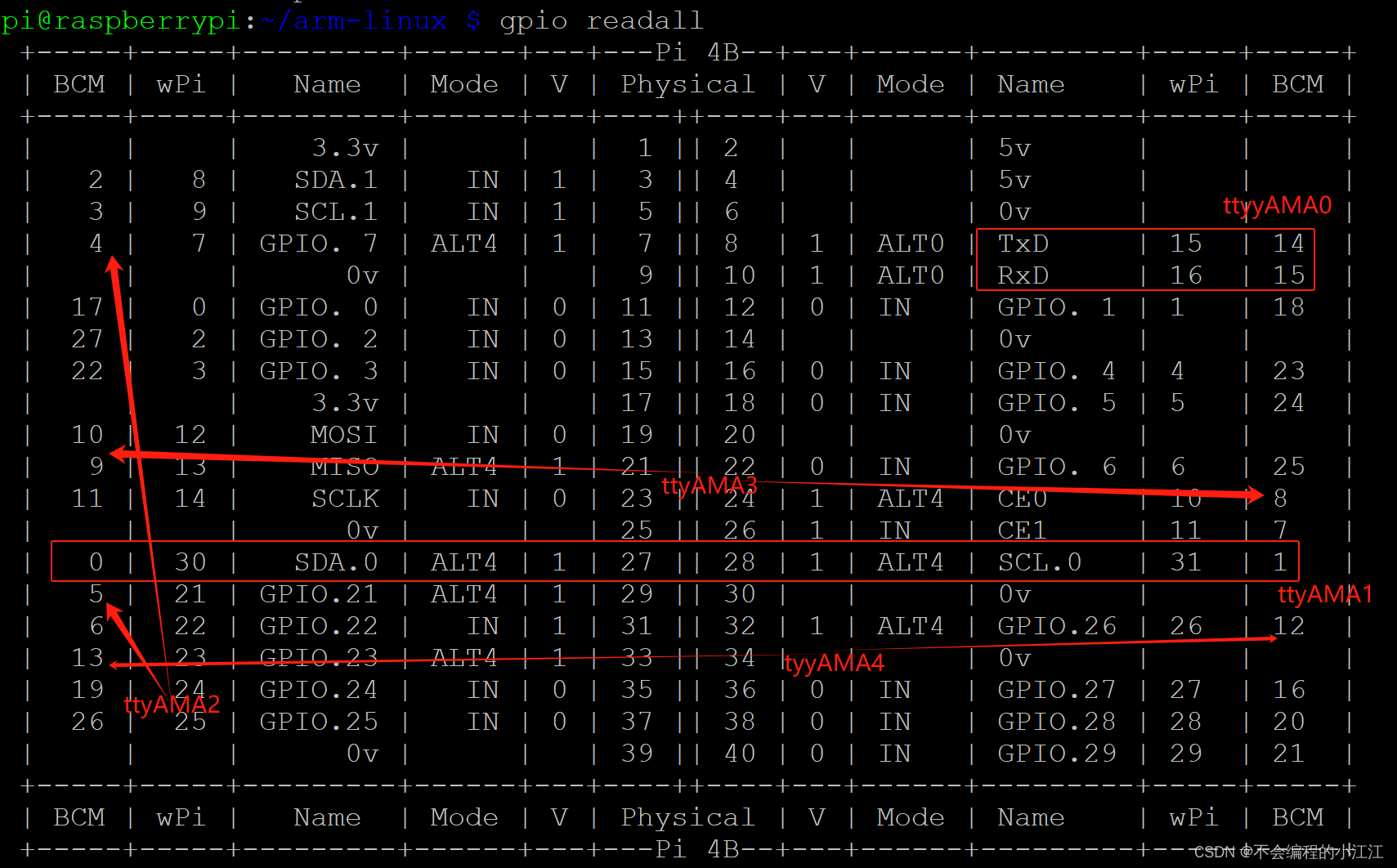
各 UART 串口与 GPIO 对应关系:
这里的GPIO对应的是BCM码,不是wPi码
GPIO14 = TXD0 -> ttyAMA0
GPIO15 = RXD0 -> ttyAMA0
GPIO0 = TXD2 -> ttyAMA1
GPIO1 = RXD2 -> ttyAMA1
GPIO4 = TXD3 -> ttyAMA2
GPIO5 = RXD3 -> ttyAMA2
GPIO8 = TXD4 -> ttyAMA3
GPIO9 = RXD4 -> ttyAMA3
GPIO12 = TXD5 -> ttyAMA4
GPIO13 = RXD5 -> ttyAMA4
查看树莓派GPIO引脚编号:gpio readall
注意:查看时,将树莓派的USB接口面对自己,别反了😂
串口通信函数分析
使用时需要包含头文件:#include <wiringSerial.h>
打开串口
int serialOpen (char *device, int baud)
device : 串口的地址,在Linux中就是设备所在的目录。默认一般是`"/dev/ttyAMA1"`这种, 我的是这样的。
baud : 波特率 通常为 `9600`
返回 : 成功返回文件描述符,失败返回-1
获取串口缓存中字节数
int serialDataAvail (int fd)
fd : 文件描述符
返回 : 串口缓存中已经接收的,可读取的字节数,-1代表错误
发送一个字节
void serialPutchar (int fd, unsigned char c)
fd: 文件描述符
c : 要发送的字符数据
读取一个字节
int serialGetchar (int fd)
fd : 文件描述符
返回 : 读取到的字符
从串口读取一个字节数据返回,如果串口缓存中没有可用的数据,则会等待10秒,如果10后还有没,返回-1
所以,在读取前,最好需要通过serialDataAvail判断是否有数据
发送字符串
#include <unistd.h>
size_t write (int fd,const void * buf,size_t count)
fd : 文件描述符
buf : 需要发送的数据缓存数组
count : 发送buf中的前count个字节数据
返回 : 实际写入的字符数,错误返回-1
接收字符串
#include <unistd.h>
*size_t read(int fd,void * buf ,size_t count);
fd : 文件描述符
buf : 接收的数据缓存的数组
count : 接收的字节数.
返回 : 实际读取的字符数。
当要接收的数据量过大时,wiringPi建议使用write和read函数。
接收到的buf可通过strstr和strchar来判断是否存在子串和特定字符,或者使用switch扫描不同情况。
串口通信示例代码
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <wiringSerial.h>
#include <wiringPi.h>
#include "pthread.h"
#include <stdlib.h>
int fd;
void *write_thread(void *datas)
{
char send_buf[]="hello world";
char cmd;
while(1)
{
printf("pthread1:按任意键发送数据\n");
scanf("%c",&cmd);
write(fd, send_buf, strlen(send_buf)); //测试发送数据
}
}
void *read_thread(void *datas)
{
int nread;
char msg[128]={'\0'};
printf("pthread2:listing......\n");
while(1)
{
while(serialDataAvail(fd)!=-1 ) //串口有数据
{
nread=read(fd, msg,128); //读取并保存数据
if(nread==0)
continue;
printf("get data:%d Byte context:%s\n",nread,msg);
printf("pthread2:listing......\n");
memset(msg,0,strlen(msg));
}
}
}
int main()
{
pthread_t writeThread;
pthread_t readThread;
if(-1==wiringPiSetup())
{
printf("setup error\n");
exit(-1);
}
//请开启实验对应的串口即可, 若同时用到多个串口,注意变量命名
//fd = serialOpen("/dev/ttyAMA1",9600); //打开ttyAMA1
//fd = serialOpen("/dev/ttyAMA2",9600); //打开ttyAMA2
//fd = serialOpen("/dev/ttyAMA3",9600); //打开ttyAMA3
fd = serialOpen("/dev/ttyAMA4",9600); //打开ttyAMA4
pthread_create(&writeThread,NULL, write_thread,NULL); //创建串口发送线程
pthread_create(&readThread, NULL, read_thread, NULL); //创建串口接收线程
pthread_join(writeThread,NULL);
pthread_join(readThread, NULL);
return 0;
}
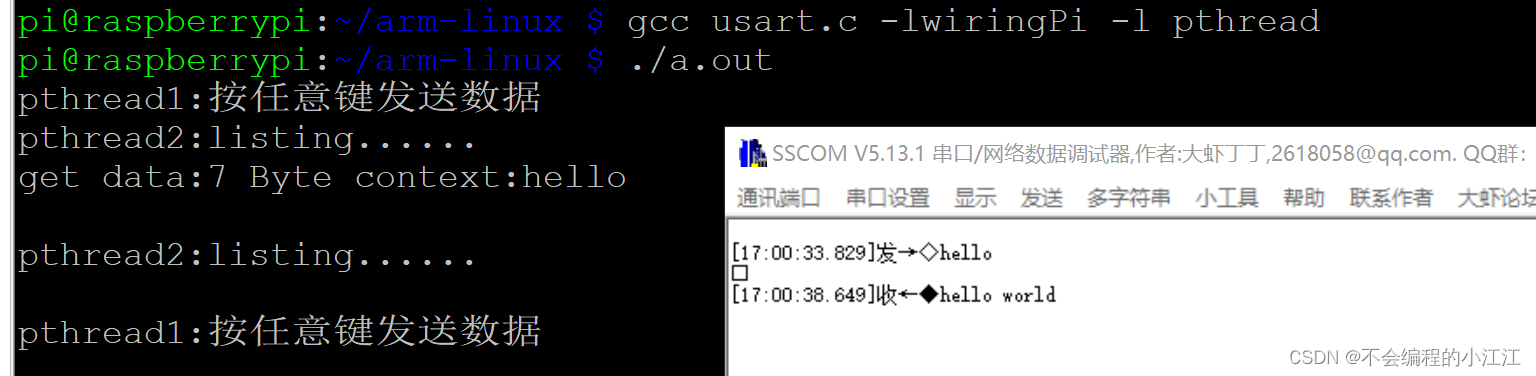
程序运行结果如下所示,串口收发自如